徕卡RTC360三维激光扫描仪在竣工测量中的应用
2019-10-28汪晓慧吴晓培
汪晓慧,吴晓培
(浙江省测绘大队,浙江 杭州 310030)
随着科学技术、计算机技术的快速发展,测绘科学技术也发生了巨大的变化,三维激光扫描技术已经逐步应用于三维建模、变形监测等领域[1-2]。传统的三维激光扫描技术存在点云数据量大、点云拼接过于繁琐等问题,计算机技术的发展,为点云大数据处理提供了平台,新型点云自动拼接三维激光扫描仪的出现,解决了点云拼接问题,使得三维激光扫描仪能快速应用于测绘领域[3-6]。三维激光扫描技术被称为“实景复制技术”,其能快速获得原始的测绘数据,并完整、高精度地重建实体,地面三维激光扫描将传统的点测量发展为面测量,可以高效率、高质量、低成本地获取海量的空间数据,充分体现测量目标的特征信息[7-8]。
本文采用徕卡RTC360三维激光扫描仪快速获取工程实例的三维激光点云数据,原始点云经智能拼接处理生成点云模型并绘制竣工图,经过验证比对,精度符合规范要求,充分显示了徕卡RTC360三维激光扫描仪的技术优势。
1 设备简介
1.1 仪器结构组成
仪器由三维激光扫描头、3个HDR相机和内置惯导系统3个部分组成,还配置了工作时架放仪器的三脚架和方便查看数据的平板电脑,脚架每边分为四节,可根据高度需求自由缩放;外业数据采集时可通过平板电脑实时查看数据和作业时间。
1.2 核心技术
RTC360三维激光扫描仪融合了徕卡三大核心先进技术:TruRTC实景复制技术、VIS视觉追踪技术、SmartReg智能拼接技术,使RTC360三维激光扫描仪与徕卡FIELD 360外业操控软件、REGISTER 360智能拼接软件完美结合,设备轻便,操作简单,是一套集智能、简单、高效、极速于一体的三维激光扫描仪。
(1)TruRTC实景复制技术:RTC360内置3个相机,单镜头时可达1200万像素,全景照片时可达4.32亿像素,成像质量高,现场细节更加逼真,HDR全景照片采集时间仅需1 min,不受环境光源影像,满足了不同场景的照片采集。
(2)VIS视觉追踪技术:VIS通过5个内置相机和IMU实时计算出连续两个站的相对位置,供精准的点云拼接,整个过程中无需标靶,无需公共点,无需人工干预,全自动操作,实现智能化拼接,简单高效。
(3)SmartReg智能拼接技术:Field360 App现场实时预拼点云数据,提高点云拼接速度与精度;Register360一键导入点云数据,全自动化拼接,简化内业数据处理流程,工作更高效。
1.3 主要性能
RTC360扫描仪具有全方位视角扫描、速度快、精度高的特点,拥有3600×3000的扫描视场角,130 m的有效范围,扫描速率高达2 000 000点/s,最高点位精度达到1.9 mm,HDR相机单镜头时达到3600万像素,具有一块电池达到4 h的超长蓄电能力,视觉追踪技术实时跟踪计算前一站的相对位置,保证了点云的自动拼接功能。
2 作业流程
采用RTC360三维激光扫描仪进行竣工测量主要是以内业为主、外业为辅的作业模式,其作业过程包括外业实地点云数据采集、数据处理和数据测图3大部分,如图1所示。
2.1 数据采集
外业数据采集分为前期路线规划、现场数据采集和采集数据检查3个步骤。前期通过对测区周边地形情况的了解,初步规划好架设站点位置;根据规划好的路线和实际现场情况逐站进行扫描,扫描过程中根据项目要求设置好相应的采集参数,在扫描过程中点的密度分为高、中和低3个等级,可根据项目要求和扫面对象的复杂程度自主选择,每站扫描完成直接搬站,无需对中整平等烦琐步骤;每站数据采集完成可通过外业操控平板电脑对数据质量进行检查,数据采集完成可对整条采集路线数据进行检查。
2.2 点云数据处理
点云处理分为数据预处理、点云拼接、控制点导入、点云去噪和数据输出5部分,点云数据处理是在Cyclone软件中进行的,软件数据是通过数据库的方式进行处理的;点云的拼接是通过一定的约束条件将多站点扫描数据配准到统一坐标系中的过程,拼接完成之后将得到一个项目的完整点云,通过旋转和平移的方法对有重合的两站点云进行拼接,主要有基于标靶的拼接和基于点云视图的拼接两种方法;点云拼接完成且拼接误差合格后加入控制点得到绝对坐标,然后通过相应的去噪功能进行点云去噪,分为整体去噪和局部去噪两种方式,软件点云输出包括LAS、RCP和E57等多种格式。
2.3 模型精度检查及点云模型测图
对生成的点云模型中均匀分布的地物点对模型精度进行检查,模型精度合格方能进行点云模型测图。点云模型测图主要是在CloudWorx for AutoCAD软件进行的,软件通过读取Cyclone软件服务器中的数据,在AutoCAD绘图软件中支持海量的扫描点云数据,AutoCAD软件强大的绘图功能与精确的点云数据相结合,可绘制各种线画图,并提取物体的各特征要素,同时还可以兼容南方CASS绘图软件,直接绘制地物并添加属性。
2.4 外业精度检查
竣工图测绘完成后通过野外进行调绘对遮挡和错误表示的要素进行补测修改,图面整饰完成后从图中抽取均匀分布的主要地物点进行精度检查。
3 项目应用
3.1 试验测区概括
试验项目位于浙江省台州市椒江区某地的拆迁安置房,整个试验测区面积约0.05 km2,如图2所示。由于是刚建好的拆迁安置房,测区主要以房屋和道路为主,植被主要是低矮的绿化,基本没有高大的树木,因此存在的遮挡情况较小,比较适合利用三维激光扫描仪进行点云建模。
3.2 数据采集
本次数据采集共架设了62站,采用低密度的扫描方式,分别架设在分岔路口和房屋之间有空隙的区域,在保证能全方位无死角的扫描到测区每个区域的情况下,尽量减少数据冗余。以圆形标靶的形式测绘了10个控制点,每个控制点分别以不同的时段测量了两次,每次测量不超过两个测回,每个测回平面误差不差过2 cm,高程误差不超过3 cm,以保证控制点的精度。
3.3 数据处理
采集的点云导入Cyclone软件中进行处理,由于RTC扫描仪具有自动拼接功能,因此采用基于点云视图的方法进行拼接,由平面视图和高程视图两部分组成,部分拼接视图如图3和图4所示。拼接过程中连续的相邻两站一般不需要人工干预,只要通过对其进行检查对局部没有拼接到位的细微区域进行精细化调整,由于VIS视觉追踪技术实时计算相邻两站有一定的时间限制,针对相隔时间较久的相邻两站需要进行人工拼接。从图5整个试验区域的拼接报告中可以看出,最大的拼接误差为24 mm,最小的为10 mm,符合拼接要求,即可生成点云模型,通过在模型上添加标靶控制点,导入坐标信息进行绝对定向,得到相应坐标系的点云模型。如图6所示。
3.4 基于点云模型的竣工图测绘
(1)立面图:在CloudWorx for AutoCAD软件中通过坐标转换后的点云立面切片,根据点云纹理绘制立面图,如图7所示。在每部分绘制过程中,通过点云刷新系统会根据电脑配置显示相应密度的点云,对于点云模糊不清的区域,可根据高清全景照片查看模糊细节。绘制完毕后关闭点云数据,即可获得立面图,如图8所示。
(2)竣工地形图:绘制房屋、电杆等立体地物时,在CloudWorx for AutoCAD软件中以高程视角找到相应高度的位置和厚度进行切片剪裁,切换到平面视角进行绘制。在点云切片面可根据地物特征进行矢量数据采集,可直接调用南方CASS作图软件中的相应地物进行绘制,通过点云刷新,系统会根据电脑配置显示相应密度的点云,对于点云模糊不清的区域,可根据高清全景照片查看模糊细节。每一个切片对应的地物绘制完毕后,可在剪切管理器中将切片删除,再重新根据绘制地物对象剪切相应的切片。全部数据采集完成后直接将点云数据关闭,即可获得相应的矢量地形图。
3.5 成果精度评定
为了检验点云模型测量立面图和矢量地形图的精度,采用钢卷尺量测了一些窗户和门的宽度和高度,并用TS02全站仪均匀测量了棱角分明的特征点,主要是精度要求较高的房角点,以实地量测的坐标作为点云模型测量地形图的检查点。通过式(1)计算检查点和模型上采集数据的平面中误差和高程中误差,验证基于点云模型矢量化地形图的精度[9]。

(1)
3.5.1 立面精度分析
立面测绘精度主要以测区西北面几幢房屋的立面测绘图作为依据,测绘了每幢房屋4个面的立面效果图,外业分别测量了窗户、门和墙体的宽和高进行对比,另外还测量了一些明显的地物加入相对宽度的对比,并生成相对误差精度分布图,如表1、图9所示。

表1 立面相对精度统计 m
通过表1可知,中误差为0.015 m,其中最大误差为0.029 m,最小误差为0。通过图9可知,相对精度误差主要分布在-0.01~0.02 m之间,符合立面精度要求。
3.5.2 矢量地形图精度分析
为了检测在点云模型上矢量化的地形图的精度,以台州市某个拆迁安置房扫描的点云模型作为检测对象,实地测量了72个平面检查点,12个高程检查点,对点云矢量测图精度进行检测,如表2、图10所示。
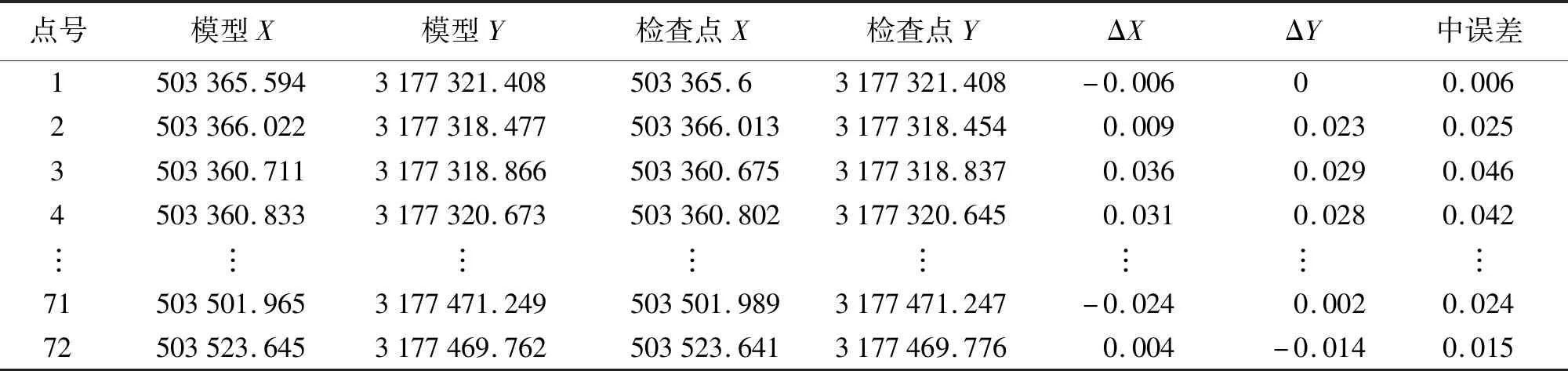
表2 矢量地形图平面精度统计 m
从表2中可知,单个点位误差最大为0.056 m,最小为0.006 m,点位中误差为0.028 m。从图10中可知,单个点位误差大于0.05 m的有2个,超出限差范围率为3%,平面精度基本分布在0~0.03 m之间,符合1∶500地形图的平面精度要求。

表3 高程精度统计 m
可计算出高程中误差为0.016 m,从表3可得,最大高程误差为0.027 m,最小为0.002 m;从图11可知,高程误差基本分布在-0.01~0.02 m之间,没有超过精度误差要求,完全符合1∶500地形图高程精度要求。
4 结 语
徕卡RTC360三维激光扫描仪精度相对较高,操作简单方便,自动拼接点云功能,高清的全景照片。在本次的立面和竣工地形图的测绘试验中,立面相对误差0.015 m,完全符合立面测绘的精度要求;矢量地形图的平面中误差0.028 m,高程中误差0.016 m,符合竣工测绘要求。在试验过程中也存在一些问题,扫描过程中每个角落、每个拐角都要进行搬站扫描,不适用大面积的地形测绘;扫描的有效距离为130 m,也限制了应用于一些高楼的点云扫描,只能适用于一些中低楼的扫描;在扫描过程中存在顶部为扫描的盲区,因此在建立的点云模型中顶部没有点云,完整的点云模型还需要后期无人机等设备的补充。在测绘地理信息行业的应用中,RTC360扫描仪适用于低层楼的高精度立面测绘、小面积的竣工测绘、纹理复杂的三维建模和复杂管线的三维建模等高精度且复杂的三维建模,为无信号的隐蔽空间提供了建立三维模型的可能,为智慧城市提供了地面和地下三维模型的完整性。
