基于机器视觉的轮胎花纹深度测量方法研究
2019-10-25李爱娟王希波慈勤蓬
李爱娟,王希波,慈勤蓬
(山东交通学院汽车工程学院,山东 济南 250357)
0 引言
汽车轮胎花纹的主要作用是增加胎面与路面间的摩擦力,排除积水,以防止车轮打滑。在用车辆的轮胎花纹深度不低于限值要求是汽车安全行驶的重要保障条件之一。世界各国对轮胎花纹深度的要求都非常重视,当轮胎花纹的深度≤1.6 mm时就必须更换。
目前,国内轮胎磨损测量一般都是在车轮胎静止状态下,用深度尺进行测量。该方法效率较低,人为因素影响较大,测量不方便[1-2]。国外基于结构光测试技术,推出了轮胎花纹的结构光测试装置。该装置提高了在用车轮胎花纹的测试效率,降低了劳动强度[3-4]。其中,基于结构光测试技术等高效测试方法监测在用汽车的轮胎花纹深度,是汽车检测的一个发展方向[5]。国内在基于机器视觉的非接触式轮胎花纹检测方面研究很少,开发自主的轮胎花纹深度检测技术已成为国内一些汽车检测设备制造企业的发展重点。
结构光测试技术已在测量领域得到了广泛应用[6]。采用基于结构光的机器视觉方法测量轮胎花纹深度的难点,在于轮胎花纹的识别与位置判断。本文首先介绍轮胎花纹深度系统测试原理,然后给出轮胎结构光外廓图像的处理过程,再建立轮胎花纹的识别和深度测量方法,最后将所研究的方法在试验平台上进行验证。
1 轮胎花纹深度测试系统原理
本文所设计的轮胎花纹深度测试系统的测试装置如图1所示。
轮胎从盖板上滚过,盖板上设置激光和反射镜的透视窗;相机平行于地面,隐藏于盖板之下,相机捕获反射镜中的图像。相机参数如下:感光芯片类型为CCD;感光芯片尺寸为4.9 mm×3.6 mm;水平/垂直分辨率为1 294 pixels×964 pixels;水平/垂直像素尺寸为3.75 μm×3.75 μm;帧速率为30 fps;色彩为黑白;镜头焦距为fx=6.1、fy=6.1;左相机光心位置为u=630.8、v=491.4,右相机光心位置为u=632.6、v=452.1。
线激光置于反射镜前面,线激光平面与地面夹角为45°;反射镜宽度为110 mm,反射镜平面与地面夹角为45°;相机镜头光轴中心通过反射镜中心,反射镜中心距离镜头中心距离为250 mm。
光平面与轮胎外廓曲面相交,形成轮胎外廓线。轮胎前行越过触发装置时,相机触发拍摄,获得轮胎外廓线图像。外廓线蕴含轮胎花纹沟槽深度信息。若光平面经过轮胎转轴中心,则外廓线上测量的花纹深度即为实际花纹深度;否则,实际花纹深度与测量花纹深度不一致,两者的差别受轮胎和光平面相对位置影响。因此,确定拍摄时刻的光平面与轮胎相对位置关系,是轮胎花纹深度测试的基础。

图1 测试装置示意图
2 轮胎结构光外廓图像的图像处理
图像处理的目的,是根据捕捉到的轮胎结构光外廓图像,获得世界坐标表示的光条中心线。图像处理流程如图2所示。

图2 图像处理流程图
轮胎前缘底部到达触发位置,触发左右两台相机;相机同步拍摄,获得光条图像。两台相机的图像包含了完整的轮胎外廓图像。对拍摄的照片进行畸变校正[7]以消除背景噪声[8],并由灰度中心法获得中心线[9]单像素图像。将该图像作为轮胎花纹深度检测的基础。将左右相机图像的中心线图像,转换为世界坐标[10-11]。光条世界坐标曲线如图3所示。

图3 光条世界坐标曲线
世界坐标表示的光条中心线表征了实际轮胎外廓形状,世界坐标的原点取决于相机标定时标靶的原点,其随着标靶位置或者标靶原点设定点的变化而变化。但光条中心线的形状和中心线上任意两点之间的相对位置不随标靶位置或者标靶原点设置的变化而变化。因此,世界坐标表示的光条中心线上的花纹位置和深度与实际轮胎花纹的位置和深度是一一对应且相等的关系,可以用来检测实际轮胎花纹的深度及位置。
3 轮胎花纹位置识别与深度测量
在轮胎外廓曲线上识别出花纹,是自动测试的关键。花纹识别的主要内容包括判断花纹特征、确定花纹位置和花纹个数。在确定花纹位置的基础上,可依据花纹几何特征,测量各个花纹的深度。
3.1 花纹特征判断
将两台相机所得的光条中心世界坐标曲线合并,得到完整的光条中心线世界坐标数组。由于光条亮度分布不均匀的原因,光条中心线世界坐标的x坐标并非等间距分布。为了便于数据处理,对离散数组进行插值,获得的等间距离散插值曲线如图4所示。

图4 等间距离散插值曲线
由图4可知,轮胎花纹在外廓曲线上表现为局部凹陷的特征。由于存在测试误差,以及轮胎表面有更小尺度的沟槽,在轮胎外廓曲线上,除了花纹之外,其他区域还存在小尺度的凹陷特征。因此,在进行判断轮胎花纹特征时,算法需要自动区分非轮胎花纹的凹陷区域与轮胎花纹所造成的凹陷区域。
采用高斯滤波器对轮胎花纹曲线进行滤波,可以消除非花纹区域的微小凹陷对花纹识别的干扰。通过改变高斯函数σ的大小,可对曲线上与之相应尺度的特征进行强化[12]。花纹识别的任务就是为不同花纹的轮胎选取合适的高斯函数。尺度为σk的离散高斯函数在xi的函数值为:
(1)
离散高斯函数与轮胎外廓曲线的卷积为:
Y=yi·gki
(2)
取σk=1、3、5、7、9、11、13,离散高斯函数为xi∈(-3σk,3σk),离散间距为0.5的高斯函数gki与175/70r14轮胎花纹曲线离散卷积,其高斯滤液曲线如图5所示。由图5可见:当尺度σk<5时,在卷积曲线上因一些非花纹引起的曲线突变仍比较明显;当尺度σ>11时,则会使实际的轮胎花纹被平滑。

图5 高斯滤波曲线(175/70r14)
采用σ为3、9、13时对离散高斯函数滤波,所得到的滤波曲线和滤波曲线上的极大值点的分布如图6所示。

图6 不同σ的滤波曲线及极大值点的分布图
当σ=3时,左数第三个轮胎沟槽左侧有两个极大值点;当σ=13时,左数第四个轮胎沟槽左侧没有极大值点,极值点与花纹不一一对应;当σ=9时,每个轮胎花纹左侧都有一个极大值点,极值点与花纹一一对应。计算表明,对于175/70r14轮胎,尺度σ在5~11范围时,在实际花纹的两侧位置,卷积曲线上存在一个极大值点,能够建立极值点与花纹的一一对应关系。
对于235/50R18轮胎,其等间距差值轮廓线如图7所示,轮胎上有三个花纹。
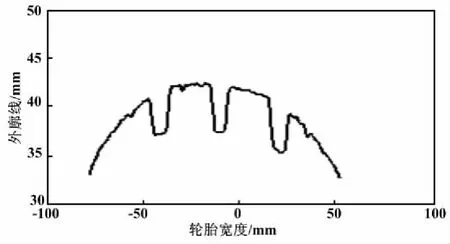
图7 等间距插值轮廓线
对轮廓线采用σk为1、3、5、7、9、11、13、15的离散高斯函数滤波,所得到的高斯滤波曲线如图8所示。

图8 高斯滤波曲线(235/50R18)
与175/70r14轮胎滤波曲线相比,在σ=3时,曲线上已经光滑,没有了突变明显的位置;当尺度大于5时,个别的花纹曲线已经被平滑。σ=1、3、5、7和11的滤波曲线上极大值点个数如表1所示。当σ大于5和小于3时,极大值与花纹之间无法建立一一对应关系。

表1 不同σ的滤波曲线上极大值点个数
对其他常用轮胎的测试情况表明,当采用σ=5时,能建立起极大值点与轮胎花纹之间的一一对应关系。采用σ=5的离散高斯函数,σ可以通过极大值点对轮胎花纹所在位置进行识别。
3.2 花纹深度确定
确定了花纹个数与花纹位置后,逐一测量各花纹的深度。上述两个相邻极大值点之间的曲线,对应单一轮胎花纹。175/70r14轮胎单个花纹曲线如图9所示。

图9 175/70r14轮胎单个花纹曲线
每个花纹的深度就是花纹底部点到花纹两侧点连线的距离的最大值。通过以下步骤计算单个花纹深度。
①取出单个花纹,在单个花纹曲线段内,寻找y值最低点B,记录其坐标(xB,yB)。
②在最低点左、右两侧分别取y值最大点L和R,分别记录坐标(xL,yL)和(xR,yR)。
③判断所有点是否处于线段LR的同侧:若是,进行下一步;若不是,将花纹两边与B点不在同侧,且距离直线LR最远的点作为新的L和R点。
④计算最低点B到直线LR的距离,即得到花纹深度及最深位置所在的坐标(xB,yB)。
⑤重复步骤①~步骤④,直到计算出所有花纹的深度。
4 试验结果
采用本文方法,分别对两个轮胎进行了试验测试。测试系统能够捕获轮胎结构光图片,数据处理方法可以识别并测量出花纹的深度。结构光测试结果与深度尺实测结果如表2所示。由测试结果可见,测试系统能够自动识别出花纹的个数,并测量花纹的深度。测量的绝对误差最大为0.11 mm、最小为0.02 mm,总体结果小于0.2 mm,满足轮胎花纹测试的使用要求。

表2 结构光测试结果与深度尺实测结果对比
5 结束语
本文对基于机器视觉的轮胎花纹深度测量方法进行了研究,通过建立测量系统模型、图像处理和轮胎花纹特征识别及测量等方法,可以准确判断轮胎花纹的个数,并能够得到轮胎花纹的深度。
①本文建立的图像处理方法可以成功地对相机捕捉图像进行图像处理,从而清晰地得到光条中心线的世界坐标信息,为后期的轮胎花纹识别和测量提供了基础。
②本文提出的轮胎花纹特征识别方法和花纹深度测量方法,能够准确地判断轮胎花纹个数、位置和花纹深度。该方法具有抗干扰能力强、可靠性强等优点。
③采用本文方法,分别对两个轮胎进行了试验测试。测试结果表明,所建立的基于机器视觉的轮胎花纹测量方法能够快速、自动地识别出花纹的个数,并快速、准确地测量得到轮胎花纹的深度,测量的绝对误差小于0.2 mm,能够满足轮胎花纹测试的使用要求。
