基于贝叶斯网络的楼层定位算法
2019-10-23张榜朱金鑫徐正蓺刘盼魏建明
张榜 朱金鑫 徐正蓺 刘盼 魏建明
摘 要:针对在室内定位导航过程中單独依赖行人高度位移推测楼层位置误差较大的问题,提出一种基于贝叶斯网络的楼层定位算法。该算法先是利用扩展卡尔曼滤波(EKF)对惯性传感器数据和气压计数据进行融合,计算出行人垂直位移;然后利用误差补偿后的加速度积分特征对行人在楼梯中的转角进行检测;最后,利用贝叶斯网络融合行人行走高度和转角信息推测行人在某一层的概率,从而将行人定位在建筑物中最可能出现的楼层上。实验结果表明,与基于高度的楼层定位算法相比,所提算法的楼层定位准确率提升6.81%;与平台检测算法相比,该算法的楼层定位准确率提升14.51%;所提算法在总共1247次楼层变换实验中,楼层定位准确率达到99.36%。
关键词:室内定位;楼层定位;贝叶斯网络;扩展卡尔曼滤波;转角检测
中图分类号: TP212.9
文献标志码:A
Bayesian network-based floor localization algorithm
ZHANG Bang1,2, ZHU Jinxin1,3, XU Zhengyi1,2*, LIU Pan1,2, WEI Jianming1
1.Shanghai Advanced Research Institute, Chinese Academy of Sciences,Shanghai 201210,China ;
2.University of Chinese Academy of Sciences,Beijing 100049,China ;
3.School of Communication and Information Engineering, Shanghai University, Shanghai 200444, China
Abstract: In the process of indoor positioning and navigation, a Bayesian network-based floor localization algorithm was proposed for the problem of large error of floor localization when only the pedestrian height displacement considered. Firstly, Extended Kalman Filter (EKF) was adopted to calculate the vertical displacement of the pedestrian by fusing inertial sensor data and barometer data. Then, the acceleration integral features after error compensation was used to detect the corner when the pedestrian went upstairs or downstairs. Finally, Bayesian network was introduced to locate the pedestrian on the most likely floor based on the fusion of walking height and corner information. Experimental results show that, compared with the floor localization algorithm based on height displacement, the proposed algorithm has improved the accuracy of floor localization by 6.81%; and compared with the detection algorithm based on platform, the proposed algorithm has improved the accuracy of floor localization by 14.51%. In addition, the proposed algorithm achieves the accuracy of floor localization by 99.36% in the total 1247 times floor changing experiments.
Key words: indoor positioning; floor localization; Bayesian network; Extended Kalman Filter (EKF); corner detection
0 引言
近年来,基于位置的服务(Location Based Service, LBS)已经应用到很多室内场景。比如,生活中老人和小孩位置的实时监控、应急情况下救援人员的快速救援、大型商场中的实时定位与导航等。这些服务和功能的实现依赖于精确的室内定位技术,但现有的室内定位技术还无法满足人们对室内定位的需求,为此,众多科研人员投身于室内定位技术的研究。
当前主流的室内定位技术主要有Wi-Fi技术[1]、Zigbee[2]、超宽带技术[3]、射频识别[4]等,这些技术虽然定位精度较高,但在使用前需要预先部署设施,耗费大量的成本;而且在发生突发情况时,这些技术难以及时发挥作用。
近年来,随着微机电系统(Micro Electro Mechanical System,MEMS)的不断发展,基于惯性测量单元(Inertial Measure Unit, IMU)的行人航位推算(Pedestrian Dead Reckoning,PDR)[5]因其不需要事先部署设备的优点而得到了研究人员的关注。但是,由于PDR存在累计误差,这使得整个系统的可靠性受到运行时间的影响。为了减少累计误差对系统的影响,大量的研究集中在二维空间上[6-7]。然而,在复杂的建筑物中,垂直方向上的信息往往更加重要,一层楼的定位误差远比几米的水平定位误差严重得多。因此,精确的楼层定位是实现室内三维定位的基础。然而,目前大部分的楼层定位方法都是依赖于Wi-Fi信号[8-9]定位,这种方法需要花费大量的人力物力部署节点,实用性不高。所以,利用惯性传感器对楼层进行定位有着非常高的实用价值。
目前,对楼层定位技术的研究主要有兩种方法:一种是依赖行人在室内的某些特征建立特征地图,然后对当前楼层的信号(如接受信号强度、气压值等)进行匹配,从而确定行人所处的楼层位置;另一种方法是利用可穿戴式传感器件检测行人在运动过程中的过程量,如高度、行走时间等,从而确定行人所处的楼层。
文献[10]中提出了一种利用全球移动通信系统(Global System for Mobile communication,GSM)定位用户所处楼层的方法,该方法利用接收到的GSM信号建立一个室内信号图,然后在定位阶段对行人接收到的GSM信号与预先建立的地图进行匹配,从而得到该行人所处的楼层位置。该方法的楼层定位准确率达到73%,将行人定位在两层间的准确率可达95%。
文献[11]中利用Wi-Fi信号度对行人的楼层位置进行定位。该方法分为离线和在线定位阶段:离线阶段利用收集到的行人Wi-Fi信号建立指纹地图;在线定位阶段则将客户端接收到的Wi-Fi信号强度与创建的指纹地图进行匹配,进而确定行人当前的楼层位置。
文献[12]中利用气压计建立建筑物的气压值地图,将行人的实时气压值与事先建立的气压地图进行比对进而推测行人的楼层位置。该方法在校准气压计和建立完整的气压地图后,楼层定位准确率达到98%;但是,同一个位置的气压值是不断变化的,这种方法需要对气压计进行实时、准确的校准。
文献[13]中采用多个气压计进行楼层定位。该方法在建筑物中设置多个气压计作为参考,然后将行人的实测气压与观测点的气压进行比对以得到行人的楼层位置。该方法可以直接根据测量结果进行楼层定位,无需计算,但需要事先校准参考点的气压计。
除此之外,还有一些基于可穿戴式的楼层识别定位算法[14-15]。文献[16]中首先利用气压计测量数据估计行人的高度位移,然后利用估计的高度位移和已知的建筑物层高信息推测行人的楼层位置。该方法计算复杂度低,容易实现,但是对垂直方向的高度计算依赖性很高,并且对建筑物的层高先验信息的精度要求也很高,如果层高信息不够准确,很可能发生楼层定位错误。
文献[17]中提出了一种根据行人在楼梯间的转角数推测行人所在楼层变化的算法。该算法首先利用加速度方差检测行人在上下楼时经过的转角数,同时利用行人行走的方向信息有效滤除转角的误检情况。在楼层定位时,该算法假设任意相邻两层之间的转角数为2,但在实际生活中可能出现转角数不固定的情况,如果依旧按照转角数为2的假设进行楼层定位,错误率会很大。
综上所述,目前依赖于辅助设备的行人楼层位置识别需要在建筑物中进行大量的数据采集建立指纹库,不便于实际应用。基于可穿戴式传感器的楼层定位算法实际应用价值更高,但依然存在一些弊端。
本文针对基于高度的楼层识别算法存在累计误差和基于平台检测算法对建筑物结构要求高的问题,提出了一种基于贝叶斯网络的楼层定位算法来定位行人的楼层位置。在算法的整体设计上,首先利用PDR框架下的扩展卡尔曼滤波(Extended Kalman Filter, EKF)方法得到行人在垂直方向的位移,同时根据转角检测算法计算行人在上下楼过程中经过的转角数;然后利用贝叶斯网络模型融合行人高度位移和楼梯转角信息,推测行人所在的楼层位置。
实验部分通过腰间佩戴定位模块在三栋建筑物内由不同测试人员多次进行楼层定位实验,结果表明所提算法在实际应用中具有较高准确性和较强的稳定性。
1 基于EKF的高度位移估计
在对垂直位移进行估计时,单独利用气压测高法或者惯性积分法的计算精度有限,而结合这两种方法能够有效提高高度估计的精度和稳定性,进一步提升楼层定位的鲁棒性。具体方法可参考文献[18],下面简要给出高度估计的流程。
1.1 气压测高法
大气气压与海拔存在着一定的关系,因此可以根据气压计测量值推测当前的海拔高度。考虑到实际气压的不稳定性,一般利用差分气压计算相对的高度位移。其中气压与行人的高度关系为:
Hp=44330×[1-(P/P0)0.19026]
(1)
其中:P为测量气压,Hp为测量气压对应的绝对高度(单位:m);P0为海平面标准气压1013.25hPa。通过式(1)计算两个位置的高度差,高度差为:
ΔH=Hp2-Hp1
(2)
其中,Hp1和Hp2分别为通过气压值计算的初始位置高度和最终位置高度。
1.2 惯性积分法
理论上,通过计算行人在垂直加速度的二重积分可以得到高度位移。假设行人在运动时的垂直加速度为ausr,通过积分可以得到垂直速度:
νs=νs-1+(as-1+as)Δts/2
(3)
其中:as-1和as分别代表在第s-1和第s个采样点行人的垂直加速度;νs-1和νs分别表示第s-1,s个采样点的速度;Δts为采样间隔。
通过分析行人的运动特点发现,行人的重心达到最高点时垂直速度为0,但由于传感器自身误差的原因,实际计算出来的速度并不为0。本文在计算过程中对其进行补偿。最后的高度位移计算为:
hs=hs-1+(νs-1+νs)Δts/2
(4)
其中,hs-1和hs分别为s-1和s时刻的高度。
1.3 EKF融合估计
考虑到气压计的不稳定性以及加速度计易受噪声影响,本文利用EKF对气压值和垂直加速度进行融合。行人的高度可由之前的加速度通过双重积分计算得到,这里将系统状态方程建立为:
H ~ i= H ^ i-1+f ~ ( sa i)
(5)
其中: H ~ i是對第i时刻的行人高度的先验估计; H ^ i-1是第i-1时刻对行人高度的后验估计; sa i=[a1,a2,…,ai]T为指定时间段内的加速度向量; f ~ (·)是相对高度计算公式,可由式(3)和(4)计算得到。
其中, P ^ i-1是在i-1时刻的后验误差协方差矩阵,
F ~ i= f ~ sa i 是在 sa = sa i时的雅可比矩阵。
根据式(2)可以计算两个位置的高度差,在行人起始高度已知的情况下可以求得任意位置的高度,则测量方程为:
Hi=ΔH
(7)
根据系统的状态估计噪声协方差和测量方差 R Q可得出卡尔曼增益为:
K i= P ~ i( P ~ i+ R Q)-1
(8)
其中:噪声方差 R Q= δ2a 00 δ2b ,δ2a和δ2b分别表示加速度计和气压计的噪声方差。则行人高度的最优估计为:
H ^ i= H ~ i+ K i( H P i- H ~ i)
(9)
其中误差协方差矩阵更新为:
P i= P ~ i- K i P ~ i
(10)
在空气温度、风速等特征变化大,以及行人运动噪声大的情况下,所采用的高度估计算法依旧能够保持一定的稳定性。
2 转角检测
对于特定的建筑物,行人在楼梯中经过的转角可以作为上下楼过程中的一个重要特征。首先,行人在楼梯中经过的转角数量不受行人的运动特征,如步频、步长等因素影响。无论行人以何种速度运动,其经过的转角数量不会改变。其次,行人在楼梯中经过的转角不受行人运动习惯的影响,行人的运动方式和习惯不会改变其经过的转角数量。再者,楼梯中的转角是固定不变的。在建筑物中,楼梯中的转角位置和数量都是固定的。最后,转角数量只能为整数,并且比行人的步伐数量级更小,更方便计数。
本文提出一个有效检测行人转角的方法,并利用文献[17]中提出的转角修正算法修正本文提出的转角检测算法。该方法先将加速度积分得到行人运动中的速度,并利用行人的运动特征补偿噪声,利用补偿噪声后的速度积分得到的高度位移检测行人的转角。
图1为同一组数据的加速度方差和根据提出的加速度积分方法得到行人高度位移方差对比。在该组数据中,图(a)为行人在楼梯的转角处的加速度方差,图(b)为相应加速度经过补偿后的方差。此次运动的路径为从建筑物2楼经过楼梯到4楼再返回2楼。如图中的虚线所示,当检测到方差下降和上升的趋势时为经过一个转角。根据图中的曲线可以看出行人一共经过了11个转角。
由于行人在楼梯转角处运动幅度小,同时行走方向也会发生180°的转变,利用这一信息可以对误检的转角进行修正。如果行人在上下楼梯的过程中多检测到转角,可以利用方向信息进行修正。如图2中的矩形框所示,即使行人在此时检测到一个转角,但是其行走方向并没有发生明显变化,所以可以判断行人未经过转角。图2中:点线表示行人前进方向,单位为π;实线为利用加速度方差信息检测的转角信息;虚线为使用转角修正算法得到的转角检测结果。
3 贝叶斯模型
在建筑物结构不满足假设时,利用转角推测行人的楼层算法会产生很大的误差,甚至完全无法使用。为了得到精确的楼层定位数据,本文利用贝叶斯网络融合行人行走高度和转角信息推测行人所在楼层位置。本文算法在建筑物信息模糊的前提下,能够有效推测行人的楼层位置。图3为本文提出的楼层位置判断算法流程。本章首先介绍本文使用的贝叶斯网络模型,然后通过对该模型的各变量和概率进行分析,得到定位行人在建筑物任意一层的概率计算方法,从而定位行人的楼层位置。
3.1 定位模型
图4为本文提出算法的贝叶斯网络图,本文提出的行人楼层识别算法共有3个节点:Di代表根据行人高度推测的行人楼层是否在第i层,若推测行人处于建筑物的第i层,则将Di置为True,否则Di为False;Ti代表根据行人路过的转角数推测行人楼层是否在第i层,若推测行人处于第i层,则Ti置为True,否则Ti为False;Fi代表根据行人行走高度和转角数推测行人是否在第i层,若推测行人在第i层,将Fi置为True,否则将Fi置为False。此时,问题就转化为根据估计行人高度和行人路过的转角数推测行人可能出现在第i层的概率。
本文所提算法是要根据高度信息和转角信息确定概率最大的楼层。当建筑物有N层时,需要先计算行人在每一层分别所对应的概率;然后最大化楼层后验概率:
fMAP=arg max P(fi | h,t)
(11)
其中:fi代表楼层,h表示垂直方向位移,t代表路过的转角数。根据贝叶斯公式可将式(11)改写为:
fMAP=arg max(P(h,t | fi)P(fi))
(12)
这里假设建筑物中高度和转角数相互独立,则根据朴素贝叶斯原理,将式(12)改写为:
fMAP=arg max(P(h | fi)P(t | fi)P(fi))
(12)
此时求解最大化楼层后验概率问题就转化为求解条件概
率分布(Conditional Probability Table, CPT)P(h fi )、P(t fi )
以及先验概率P(fi)。具体利用贝叶斯网络推测行人楼层概
率流程如图5所示。
3.2 概率求解
根据3.1节定位模型所述,假设行人行走高度与楼层之间的关系服从高斯分布,则Di节点对应的条件概率矩阵为:
P (Di)=
1 2π σh exp - (h-Hi)2 2σ2h 1- 1 2π σh exp - (h-Hi)2 2σ2h
1- 1 2π σh exp - (h-Hi)2 2σ2h 1 2π σh exp - (h-Hi)2 2σ2h
(14)
其中:Hi是高斯分布的均值,其值为行人运动到第i层的高度变化,即行人从出发层到第i层的行走高度,它由建筑物的层高信息计算得到;σh是高斯分布的标准差,当行人实际处于建筑物的第R层中时,贝叶斯模型推测的结果应该与行人在第R层的概率对应,即在R层上的概率最大。
由于行人经过的转弯数是离散的,本文中为了保证连续性,假设行人的转角数的倒数和行人所处楼层的概率之间服从高斯分布。则Ti节点对应的条件概率矩阵可表示为:
P (Ti)=
1 2π σt exp - (t-Ai)2 2σ2t 1- 1 2π σt exp - (t-Ai)2 2σ2t
1- 1 2π σt exp - (t-Ai)2 2σ2t 1 2π σt exp - (t-Ai)2 2σ2t
(15)
其中:Ai为行人从出发层到第i层时经过的转角数的倒数,σt为高斯分布的标准差。同样,当行人实际处于建筑物的第R层中时,贝叶斯模型推测的应为行人在第R层的概率最高。
图6为方差与行人处于R层的概率关系。虚线表示σh与行人处于R层的概率关系,从中可以看出,当σh取值在0到0.11之间时,行人处于R层的概率相同且为最高,加号表示概率最大的点(0.11,1.0)。于是在本文中将σh值设为0.11。
实线为σt与行人处于R层的概率关系,从中可以看出,当σt的值为0.3时行人处于R层的概率最高,即星号点(0.3,0.997)标注的位置,因此,本文中将σt的值设置为0.3。在确定σh和σt后,即可求取P(h | fi)和P(t | fi)。
最后,关于先验概率P(fi),因为当一个行人从建筑物的某一层出发,经楼梯进行上下楼运动后,他出现在建筑物的任何一层的概率满足均匀分布。所以,P(fi)为:
P(fi)= 1 N ; i=1,2,…,N
(16)
根据前面的概率分析和贝叶斯公式即可求得行人在建筑物的第i层的概率。为了推断行人最有可能出现的楼层,需要对行人所以可能出现的楼层进行建模。对于一个N层的建筑物,需要建立N个贝叶斯模型,分别利用贝叶斯模型求得行人位于每一层的概率,然后根据这个概率对行人的楼层进行定位。
4 实验分析
4.1 实验环境
本文的实验平台采用实验室现有数据的采集模块。实验时,硬件设备佩戴于实验人员腰部正后方,如图7所示。实验平台包含的传感器有:三轴加速度计、三轴陀螺仪、三轴磁力计以及气压计。
为了更好地评价本文提出的算法,本文选取三个不同特征的建筑物进行数据的采集和实验。这三个实验场地分别为:学生宿舍、办公楼A和办公楼B。学生宿舍为一个15层的高层建筑,第一层层高为4m,第一层和第二层间的楼梯共有3个转角,其余楼层的层高均为3m,相邻两层间的楼梯有2个转角。这个建筑物环境相对封闭,人流量较小。
办公楼A共6层,层高均为4.5m,相邻两层间的楼梯有2个转角。这个建筑物环境较为封闭,人流量小。
办公楼B共5层,其第1、2层的层高均为5.4m,层间转角数为4,第三层到第五層的层高均为3.6m,层间转角数为2。这个办公楼的环境相对开阔,人流量较大。
4.2 实验分析
图8为上述实验的三维图。在该实验中,行人从办公楼B的三层出发,经过两个转角上楼到达四层,在四层走廊行走2min,然后经两个转角到达五层,在五层走廊行走2min后,经楼梯回到三层。图8中:实线路径为行人在走廊行走的路径,虚线路径为行人在楼梯上行走的路径,圆点为出发点,星号表示终点。图中行人的二维路径是根据航位推算算法计算得到的,因本文主要研究行人的垂直方向运动,有关航位推测算法的内容在此不再详述。
图9为本次实验的仿真结果,其中实线为气压计通过式(1)和(2)计算出来的结果,可以看出其计算出来的高度结果波动明显;
点线为行人的真实高度;虚线为利用本文所用的高度融合算法估计出来的结果,其结果与实际的高度变化非常接近;
点划线为本文提出的基于贝叶斯网络的楼层定位算法估计出来的行人实际楼层变化情况。从中可以看出本文提出的楼层定位算法在行人处于上楼或者下楼的运动时,不会对其楼层进行定位,仅对其高度进行估计,当判断行人已经离开楼梯到达某一层时才对行人所在的楼层进行定位。
为了将本文提出的楼层定位算法和目前已经存在的一些定位算法进行对比,在上述三个建筑物中进行了大量的对比实验。
对比算法包括:基于高度的楼层定位算法和平台检测算法。基于高度的楼层定位算法即利用行人的行走高度,将行人的高度除以楼层高度即可得出行人的楼层变化数;平台检测算法则利用行人经过的转角数对行人的楼层变化进行判断,这种算法假设建筑物中两层间的转角数均为2。
实验人员被要求在这三个建筑物中随机走动并记录下他们的实际路线。为了保证能够充分地考虑到实际使用中遇到的各种情况,实验中要求实验人员的路径中必须包括整个建筑物的所有楼层。
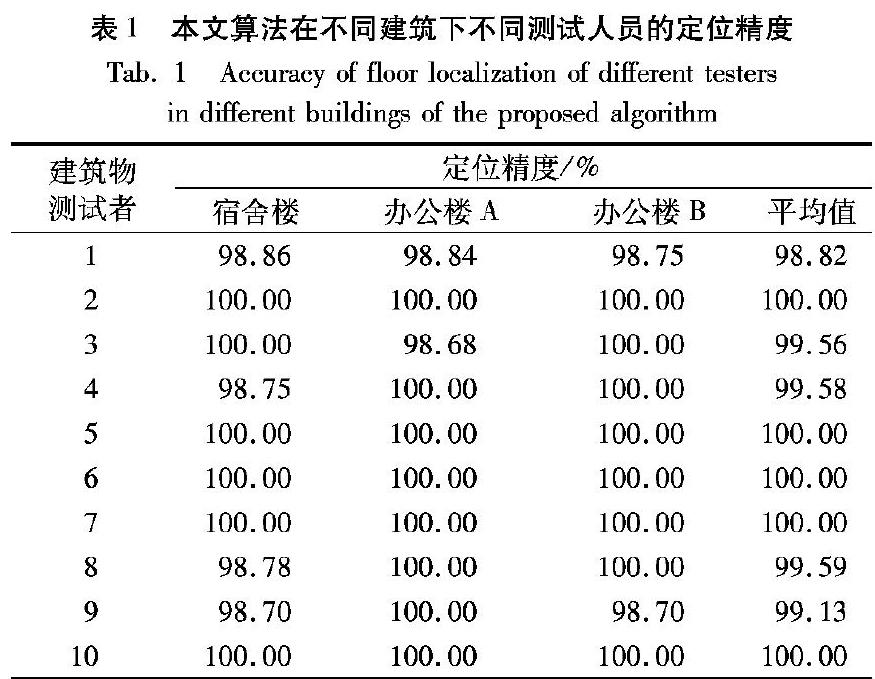
为了评价本文提出的定位算法,10个年龄在20~30岁、身高在160~183cm的实验人员分别在三个不同的建筑中进行了实验。本次实验中有3名女性和7名男性,实验结果如表1所示。
在学生宿舍进行的楼层定位实验中,10个实验人员共进行了476次楼层变化。在这些实验中,平均定位准确率为99.16%。针对不同的身高、体重和运动特征的实验人员,本文提出的楼层定位方法定位准确率均在98.5%以上。
在办公楼A进行的楼层定位实验中,10名实验人员共进行了284次楼层变化,平均定位准确率为99.30%。针对不同的身高、体重和运动特征的实验人员,本文提出的楼层定位方法定位准确率均在98.5%以上。
在办公楼B进行的楼层定位实验中,10名实验人员共进行了487次楼层变化,平均定位准确率为99.60%。针对不同的身高、体重和运动特征的实验人员,本文提出的楼层定位方法定位准确率均在98.5%以上。
在本次实验中,对于每一个实验人员,本文算法对行人楼层识别的准确率均在98.50%以上。本次实验总共发生1247次楼层变换,在实验中一共出现了8次楼层定位错误,定位准确率可达99.36%。
对这8次楼层定位出错的数据进行分析发现,之所以出现楼层判断错误的原因有:1)气压计跳变问题,即气压计在短时间内发生急剧跳变,使得本文所依赖的高度估计算法出现较大偏差,这里的气压计跳变问题与测试时所用的气压计传感器自身因素有关;2)上下楼中的停留问题,如果行人在上下楼过程中长时间停留,本文算法会在行人停留时进行楼层判断,并更新当前行人的楼层位置,结果导致楼层计算出错;3)测试人员佩戴数据采集模块时腰带没系紧,导致传感器模块在实际采集数据时噪声特别大,对后续的转角检测产生较大影响。
通过上面的实验结果和分析表明,排除极端条件的情况,本文算法在不同的实验环境和不同行人的运动情况下均能够保持较高的楼层识别准确率。
为了进一步说明本文所提的基于贝叶斯网络的行人楼层定位算法的可靠性与准确性,利用上述实验数据分析不同算法下的楼层定位精度。
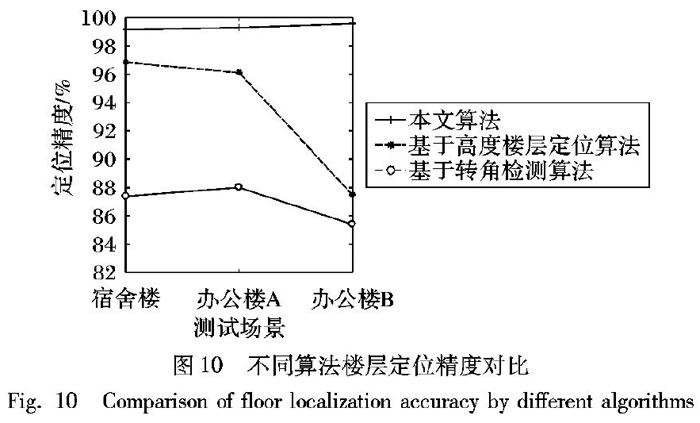
图10为不同测试场景下,三种楼层定位算法的准确率比较。从中可以看出,本文算法在这三个建筑物中的准确率均优于另外两种算法。
在办公楼A中,与基于高度的楼层定位算法和平台检测算法相比,本文提出的楼层定位算法的准确率分别提升了3.17个百分点和11.22个百分点。
在学生宿舍楼和办公楼B中,平台检测定位算法的准确率低于88%,这主要是因为这两个建筑物的结构不符合本文算法的假设。
在学生宿舍楼中,第一层和第二层之间有3个转角平台,这在定位中很有可能产生一层的楼层错误。而在办公楼B中,存在相邻两层间的楼梯有4个转角的情况,假设行人从1楼到2楼,在平台数检测正确的情况下将产生一层的楼层错误。但是本文算法在这种情况下依然能够保持很高的楼层定位精度。与平台检测定位算法相比,本文算法在学生宿舍楼和办公楼B的定位精度分别提升了1177个百分点和14.17个百分点。
从图10中可以看出,本文提出的基于贝叶斯网络的行人楼层定位算法在不同的建筑物中均能达到较高的定位精度。在办公楼B中,由于人口流动性较大,导致气压变化较大,所以利用基于气压计的高度计算结果偏差较大,楼层定位算法精度仅为87.48%。而本文提出的算法与之相比精度提升了13.8%。
根据本实验的结果与分析可得出结论,本文提出的算法在空气流动性大和不同建筑物特征的情况下均可达到较好的楼层定位效果。在所有场景中,与基于高度的定位算法和平台检测定位算法相比,本文提出的算法的准确率分别提升681%和14.51%。
综上所述,本文所提的基于贝叶斯网络的楼层定位方法在实际测试中能够达到很高的精度和稳定性,能够满足实际的应用需求。
5 结语
针对传统的楼层定位算法在实际应用中精度不高的问题,本文提出了一种基于贝叶斯网络的楼层定位方法。該方法在扩展卡尔曼滤波的基础上对气压和加速度数据进行融合以获得行人的高度位移;然后结合行人在楼梯中的转角信息,利用贝叶斯网络对行人在每一楼层的概率进行估计,最后确定行人的楼层位置。本文主要工作如下:1)利用行人在上下楼中的过程量,即转角信息,辅助定位楼层位置;2)根据行人的方向信息对转角信息进行检测,有效避免转角误检的情况;3)构建贝叶斯模型,对行人的高度信息和转角信息进行概率建模,通过最大化后验概率确定行人所在楼层。经过实际场景多次重复实验验证,本文算法在行人楼层位置的判断准确性上要优于传统的楼层判断算法。但是,本文算法需要知道建筑物的相关信息(如层高、层间的转角数);同时,本文算法在气压计发生急剧跳变以及长时间停留的情况下,精度还有待进一步提高。在未来的工作中,基于已有成果改进算法,尤其是针对气压计的不稳定性以及行人在楼梯中的停留等问题进行改进,以进一步提高算法的适用度。
參考文献
[1] 唐洋,白勇,马跃,等. 基于WiFi 的指纹匹配算法在室内定位中的应用研究[J].计算机科学,2016,43(5):73-75. (TANG Y, BAI Y, MA Y, et al. Research of WiFi-based fingerprinting matching algorithm in indoor positioning [J]. Computer Science, 2016, 43(5): 73-75.)
[2] 刘小康,郭杭.基于Zigbee室内定位系统的指纹库优化算法[J].计算机工程,2014,40(2):193-198. (LIU X K, GUO H. Fingerprint database optimization algorithm based on Zigbee indoor positioning system [J]. Computer Engineering, 2014, 40(2): 193-198.)
[3] LI S, LI G, WANG L, et al. A three-dimensional robust ridge estimation positioning method for UWB in a complex environment [J]. Advances in Space Research, 2017, 60(12): 2763-2775.
[4] 陈珊珊,史志才,吴飞,等.粒子群优化人工神经网络的RFID室内定位算法[J].传感器与微系统,2018,37(12):136-138,143. (CHEN S S, SHI Z C, WU F, et al. RFID indoor localization algorithm based on PSO-ANN [J]. Transducer and Microsystem Technologies, 2018, 37(12): 136-138,143.)
[5] BASSO M, GALANTI M, INNOCENTI G, et al. Pedestrian dead reckoning based on frequency self-synchronization and body kinematics [J]. IEEE Sensors Journal, 2016, 17(2): 534-545.
[6] LAN K C, SHIH W. On calibrating the sensor errors of a PDR-based indoor localization system [J]. Sensors, 2013, 13(4): 4781-4810.
[7] HO N, TRUONG P H, JEONG J. Step-detection and adaptive step-length estimation for pedestrian dead-reckoning at various walking speeds using a smartphone [J]. Sensors, 2016, 16(9):No.1423.
[8] 蔡文学,邱珠成,黄晓宇,等.基于WiFi指纹的室内轨迹定位模型[J].计算机工程,2015,41(6):76-82. (CAI W X, QIU Z C, HUANG X Y, et al. Indoor track positioning model based on WiFi fingerprint [J]. Computer Engineering, 2015, 41(6): 76-82.)
[9] LI Y, CHEN J, SHI Y, et al. WiFi-assisted multi-floor indoor localization with inertial sensors [C]// Proceedings of the 2016 IEEE International Conference on Wireless Communications and Signal Processing. Piscataway, NJ: IEEE, 2016: 1-5.
[10] VARSHAVSKY A, LAMARCA A, HIGHTOWER J, et al. The SkyLoc floor localization system [C]// Proceedings of the 5th Annual IEEE International Conference on Pervasive Computing and Communications. Piscataway, NJ: IEEE, 2007: 125-134.
[11] YE H, GU T, TAO X, et al. F-Loc: floor location via crowdsourcing [C]// Proceedings of the 20th IEEE International Conference on Parallel and Distributed Systems. Piscataway, NJ: IEEE, 2014: 47-54.
[12] YE H, GU T, TAO X, et al. Scalable floor localization using barometer on smartphone [J]. Wireless Communications & Mobile Computing, 2016, 16(16): 2557-2571.
[13] XIA H, WANG X, QIAO Y, et al. Using multiple barometers to detect the floor location of smart phones with built-in barometric sensors for indoor positioning [J]. Sensors, 2015, 15(4):7857-7877.
[14] ASCHER C, KESSLER C, WEIS R, et al. Multi-floor map matching in indoor environments for mobile platforms [C]// Proceedings of 2012 IEEE International Conference on Indoor Positioning and Indoor Navigation. Piscataway, NJ: IEEE, 2012: 1-8.
[15] CHAI W, CHEN C, EDWAN E, et al. 2D/3D indoor navigation based on multi-sensor assisted pedestrian navigation in Wi-Fi environments [C]// Proceedings of 2012 IEEE International Conference on Ubiquitous Positioning, Indoor Navigation, and Location Based Service. Piscataway, NJ: IEEE, 2012: 1-7.
[16] BAI Y, JIA W, ZHANG H, et al. Helping the blind to find the floor of destination in multistory buildings using a barometer [C]// Proceedings of the 35th International Conference of the IEEE Engineering in Medicine and Biology Society. Piscataway, NJ: IEEE, 2013: 4738-4741.
[17] SONG W, LEE J W, LEE B S, et al. Finding 9-1-1 callers in tall buildings [C]// Proceedings of the 2014 IEEE International Symposium on a World of Wireless Mobile and Multimedia Networks. Piscataway, NJ: IEEE, 2014: 1-9.
[18] 朱金鑫,徐正蓺,劉旭,等.基于扩展卡尔曼滤波的高程估计算法[J].科学技术与工程,2017,17(26):92-97. (ZHU J X, XU Z Y, LIU X, et al. Height estimation algorithm based on extended Kalman filter [J]. Science Technology and Engineering, 2017, 17(26): 92-97.)
