罐笼偏载状态下滑动罐耳与罐道冲击模式识别
2019-10-22陈昭君谭建平石理想薛少华黄天然
陈昭君,谭建平,石理想,薛少华,黄天然
(中南大学 机电工程学院,长沙410083)
罐道导向系统由罐道、罐道梁,罐耳等零部件组成,其作用是限位和导向[1]。罐笼运行过程中由于钢丝绳的摆动、罐道故障、物体下落等原因会造成罐笼与罐道产生冲击,影响容器的平稳运行,严重时会使容器发生卡罐、断绳等安全事故。
罐道故障方面,常见的罐道故障类型包括:连接处螺栓松动、错位、凸起、错位、磨损、井筒变形、偏斜失调等。为及时发现罐道故障,蒋玉强[2]开展了基于Laplace小波相关滤波法和粗糙集-神经网络模型的罐道冲击类缺陷诊断研究,朱艳君[3]通过小波变换提取不同故障统计特征并通过模糊综合评判法对罐道状态进行评估。张淼[4]基于小波变换模极大值和经验模态分解的故障特征提取后通过支持向量机对罐道典型故障进行识别。戚晓楠[5]通过建立罐笼动力学模型,对刚性罐道导向平顺性问题进行了研究。李爱民[6]通过EMD 分解罐笼的振动相应信号,并用小波降噪,再通过SVM识别信号中的故障信息。丁雪松[7]通过动力学仿真和模态分析研究了罐道不同故障激励下的振动特性,并通过实验进行了验证。但以上分析均是基于罐笼平衡状态下针对滚轮罐耳与罐道冲击问题的研究,超深矿井提升机在高速、重载、长时间情况下运行时,悬挂油缸会失效,如果钢丝绳变形长度差大于悬挂油缸的最大调节范围或载荷置放不平时,罐笼会偏载,滑动罐耳与罐道接触,这种情况下滑动罐耳与罐道更容易产生冲击,加剧卡罐、脱罐、罐道弯曲、倾斜等现象的发生。且滑动罐耳与罐道的冲击更加具有强噪声、非周期性、及破坏性强的特点,因此有必要针对罐笼偏载状态时的滑动罐耳与罐道故障冲击问题进行研究。
由于罐道冲击信号受速度和载荷的影响具有强噪声、剧烈冲击、非线性、非平稳性特点,一般的特征提取方法很难发现故障特征规律,胡清华[8]构造的基于邻域粗糙集模型的数值特征属性选择算法不仅能对离散型数据与连续型数据进行属性约简,还可以发现一些隐含的特征和潜在的数学规律,对罐笼偏载状态下滑动罐耳与罐道冲击特征的提取有重要借鉴意义。
模式识别方面,支持向量机具有小样本、非线性、高维度、泛化能力强等特点,在实际工程问题中具有较好的应用效果。支持向量机的分类准确率取决于核函数参数和惩罚参数,为进一步提高分类准确度,有必要对多分类支持向量机核函数参数和惩罚参数进行优化。目前常用的参数寻优方法有粒子群算法(PSO)、遗传算法(GA)和萤火虫算法(FA)。遗传算法(GA)和粒子群算法(PSO)属于启发式算法,在寻优过程易陷入局部最优,萤火虫算法(FA)在迭代初期搜索能力较弱,迭代后期在最优解附近产生剧烈振荡。2009年,Yang[9-10]等基于布谷鸟具有攻击性的寄生孵育雏鸟方式和莱维飞行特点,提出了一种新型全局优化算法——布谷鸟搜索(CS)算法。CS算法具有操作简单、全局搜索能力强和搜索速度快的优点。
针对罐笼偏载状态下滑动罐耳与罐道冲击模式识别问题,本文提出一种罐道正常、凸起、错位三种状态时的模式识别方法。以振动信号小波包分解后各频带能量熵、奇异值、标准差、波形指标作为原始特征集,通过邻域粗糙集约简,去除不相关和冗余特征,获得敏感特征集,并通过布谷鸟搜索算法(CS)优化后的支持向量机模型进行模式识别,对保障提升系统的安全运行、避免重大事故的发生有着重要意义。
1 罐道冲击模式识别原理
偏载状态下罐笼滑动罐耳与罐道正常、凸起、错位冲击冲击模式识别原理图如图1所示。
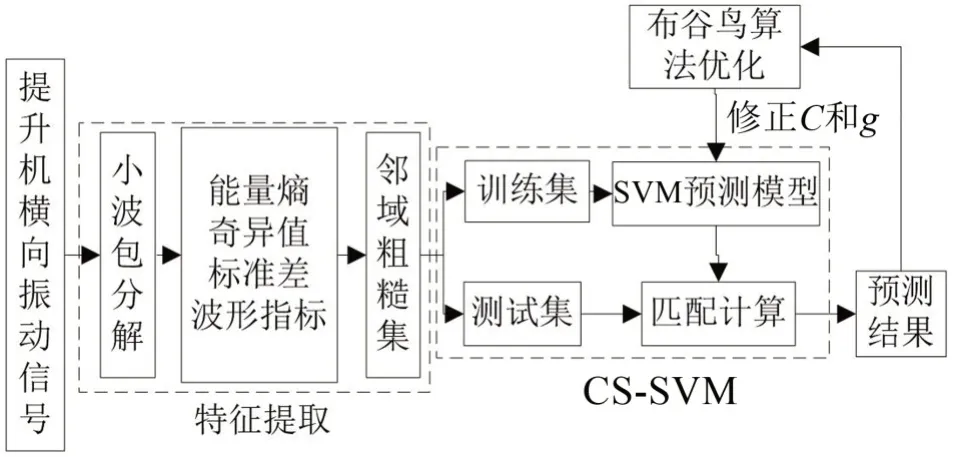
图1 罐道冲击模式识别原理
罐道故障类型诊断包括特征提取和模式识别两部分。特征提取方面,利用加速度振动传感器采集罐笼振动信号,基于小波包分解后的各频带信号能量熵、奇异值、标准差以及波形指标作为原始特征集,再通过邻域粗糙集进行属性约简以获得敏感特征集。模式识别方面,SVM根据训练样本生成分类模型,测试样本通过模型匹配实现对噪声的辨识。为提高模式识别的准确率,对影响SVM辨识性能的误差惩罚因子C和核函数参数g采用布谷鸟搜索算法(CS)进行寻优,并通过实验验证该方法的有效性。
2 特征提取
2.1 小波包能量熵
由于罐笼振动信号具有非线性、非平稳特性,仅从信号时域、频域方面分析,难以较好地提取故障特征。小波包变换在非平稳信号处理方面是一种有力的时频分析工具,不仅对可以对振动信号频带进行多层次的划分,还可以将多分辨率分析中忽略的高频信号也做同低频信号一样的逐层细化分解。信息熵能够反映振动信号出现随机变化的程度,信息熵越大信号在采样范围内的幅值波动越大,反之越趋于平稳。为提取罐笼横向振动信号在罐道正常、凸起、错位三种情况下各频带能量比例特征,将罐笼振动信号通过小波包分解后求各频带能量熵。
假设有一随机变量X={x1,x2,x3···xn}组成的信号,信息熵的计算公式如下[11-12]

式中:H(X)为信息熵测度,pi为取值概率。
提取罐道故障小波包能量熵特征步骤为:先将罐道三种状态下罐笼横向振动信号进行频谱变换,确定各种故障的频率大致分布范围,然后确定小波包分解层数,最后再对各频带进行能量熵计算。
2.2 奇异值分解
对振动信号进行奇异值分解可以简化数据,压缩维度,去除噪声,保持特征的稳定性。罐笼振动信号采集时,受周围环境影响,会存在很大的噪声,却有效的故障特征,因此,对罐笼罐道正常、凸起、错位三种状态下的横向振动数据做奇异值分解,提取稳定有效的特征,以便于罐道冲击模式识别。
假设矩阵A为R域上的m×n阶矩阵,那么存在正交矩阵U和V,使得UTAV=D,其中
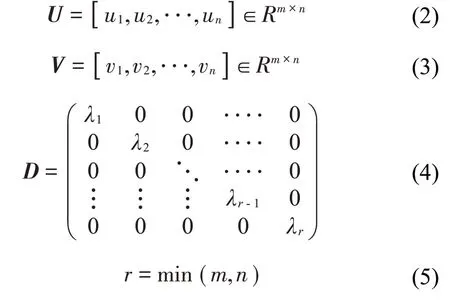
公式(2)变换为

则公式(6)即为矩阵A的奇异值分解,其中λ1≥λ2≥…≥λr≥0,表示A的奇异值[13]。
对罐道3种冲击信号进行奇异值分解来获取故障特征的具体步骤如下:1)将罐笼振动信号进行小波包分解,获得不同频带信号;2)将不同频带信号构成特征矩阵;3)进行奇异值分解;4)根据奇异值的大小和变化规律确定故障类型。
2.3 邻域粗糙集
邻域粗糙集可以有效地对不精确、不相对完整的信息进行处理,在处理过程中,可以发现一些隐含的特征,并能够发现潜在的数学规律。受钢丝绳和运行速度影响,罐笼偏运行过程中罐道与滑动罐耳的碰撞具有随机性,罐道正常、凸起、错位3 种状态下从表面看各特征没有什么规律,通过邻域粗糙集约简后,可获得有用的决策规则和有效特征的属性重要度,为模式识别提供敏感特征集。邻域粗糙集的基本概念如下:
定义1:给定论域U={ }x1,x2,…xn,A为实数型属性集合,D为决策属性集合,则称NDT=<U,A,D>为一邻域决策系统。
定 义2:针 对 任 意xi∈U,设 定δB(xi)={xj|xj∈U,ΔB(xi,xj)≤δ},其中:Δ为距离函数;δ为邻域;B为条件属性。
定义3:给定邻域决策系统NDT=<U,A,D>,决策属性D将论域U划分为N个等价类(X1,X2,…XN),对于任意属性B⊆A,定义决策系统的下近似即决策正域为

由此可得决策属性D对条件属性B的依赖度为

定义4:给定邻域决策系统NDT,B⊆A,对任意a∈B-A,{a}为属性a,定义a对B的重要度为

定义5:给定邻域决策系统NDT,a∈B⊆A,称B是A的一个约简,则B要满足:任意a∈B,皆有
1)γB-a(D)<γB(D);
2)γB(D)=γA(D)。
3 模式识别
由于现研究的罐笼罐道冲击类型有正常、凸起、错位三种,二分类支持向量机难以满足要求,需要扩展到多分类。现有的方案是将多分类问题转化为多个二分类问题进行解决,包括:“一对多”、“一对一”以及“层次多分类法”。“一对多”支持向量机泛化能力差,”一对一”分类精度更高,而层次多分类法难以解决样本不均匀导致的最优分类面的偏移问题。因此,提出用“一对一”支持向量机对罐笼偏载状态下滑动罐耳与罐道冲击类型进行模式识别,并通过对SVM 的惩罚参数C和核函数参数g进行寻优,提高分类精度,减少算法运行时间。
布谷鸟搜索算法(CS)是一种新型的群智能优化算法[9-10],具有算法参数少、操作简单、易实现等优点。在CS 算法中,将鸟巢中宿主的蛋看成是旧解,将外来布谷鸟的蛋作为新解,其目的是用新的优解代替旧的劣解。CS 算法使用随机性较强的莱维飞行对搜索的位置和路径进行更新

式中:xti——第i个鸟巢在第t代的位置;α——步长比例调节因子,α>0;L(λ)——服从Levy 分布的随机搜索路径。
基于布谷鸟优化SVM参数流程图如图2所示。
4 实验及分析
4.1 罐道故障数据采集
为方便实验搭建了多绳缠绕式超深矿井提升机试验系统,提升高度可达40 m,提升机为布莱尔提升机(图3(a)),罐道为工字型刚性罐道。罐笼向图3(b)X方向偏载,悬挂油缸失效,滑动罐耳恰好与刚性罐道接触。系统通过西门子PLC编程控制罐笼上下运动,运行速度分别设为0.3 m/s,0.7 m/s,1.1 m/s,1.5 m/s。振动传感器为PCB 三轴加速度传感器,采集设备为LMS SCADAS XS 采集设备,采样频率为12 800 Hz,采样时间5 s,振动传感器分布示意图如图3(b)所示。
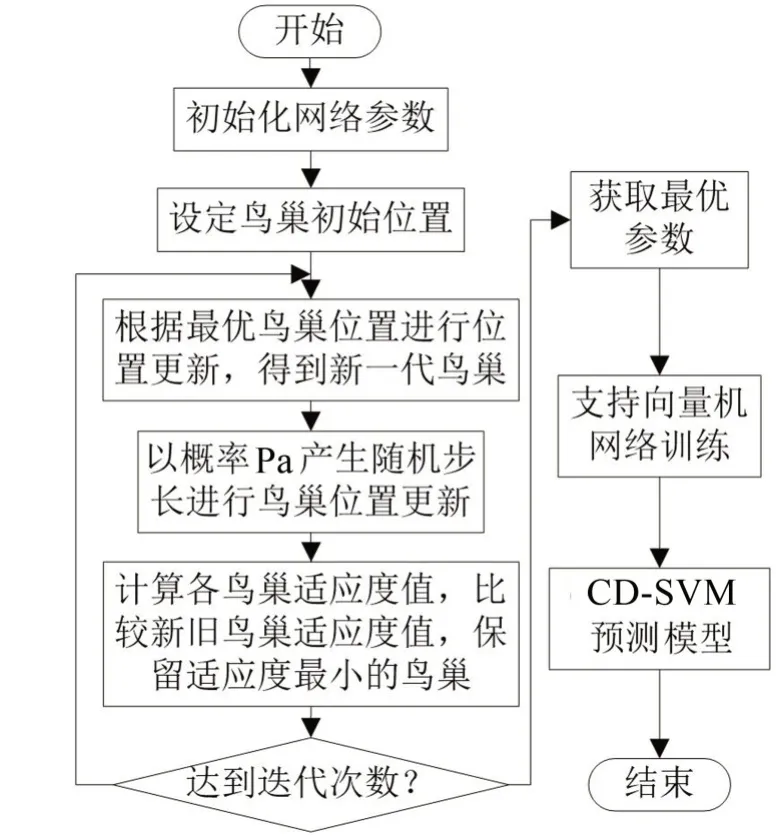
图2 基于布谷鸟优化SVM参数流程图
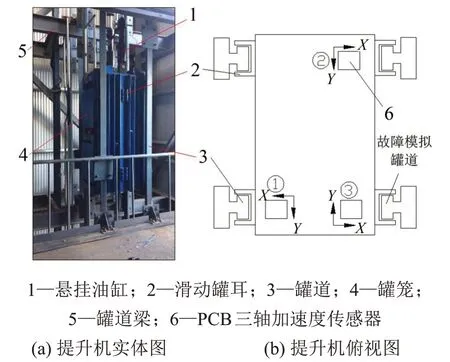
图3 提升机结构图
为模拟罐道凸起、错位2种故障,在两节罐道连接处安装不同规格、型号的铝片,如图4所示。
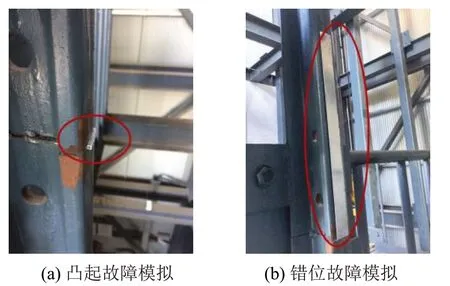
图4 罐道故障模拟图
罐道无故障、凸起、错位时4个速度下的振动数据分别采集5组,总共60组实验数据,其中每种情况下的任意3组数据作为训练样本,其余2组作为测试样本,训练集和测试集分别为36 组和24 组,实验数据处理平台为MATLAB 2014,处理器为Intel(R)Xeon(R)CPUE5-2630v4 2.20 GHz(2处理器)。
4.2 特征提取
罐笼横向振动主要受罐道与罐耳的碰撞影响,纵向振动主要受钢丝绳的影响。在研究罐道故障模式识别时,只研究罐笼的横向振动信号,即图3中X方向信号。由于图3(b)中3 号传感器距离布置罐道的故障最近,振动信号更加具有可靠性,因此,后面数据处理与分析皆基于该传感器的振动信号。
分别将正常、凸起、错位状态下采集的刚性罐道的振动信号消噪后进行小波包2层分解,得到4个频带(图5-图7)。
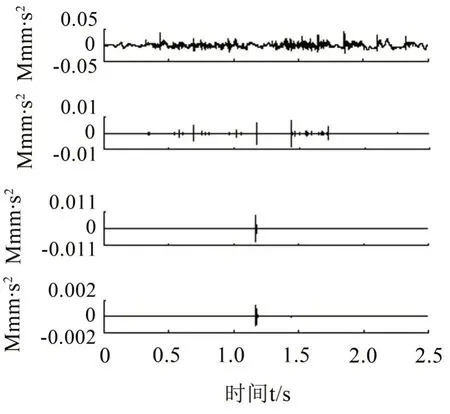
图5 正常状态下罐道振动信号小波包分解后结果
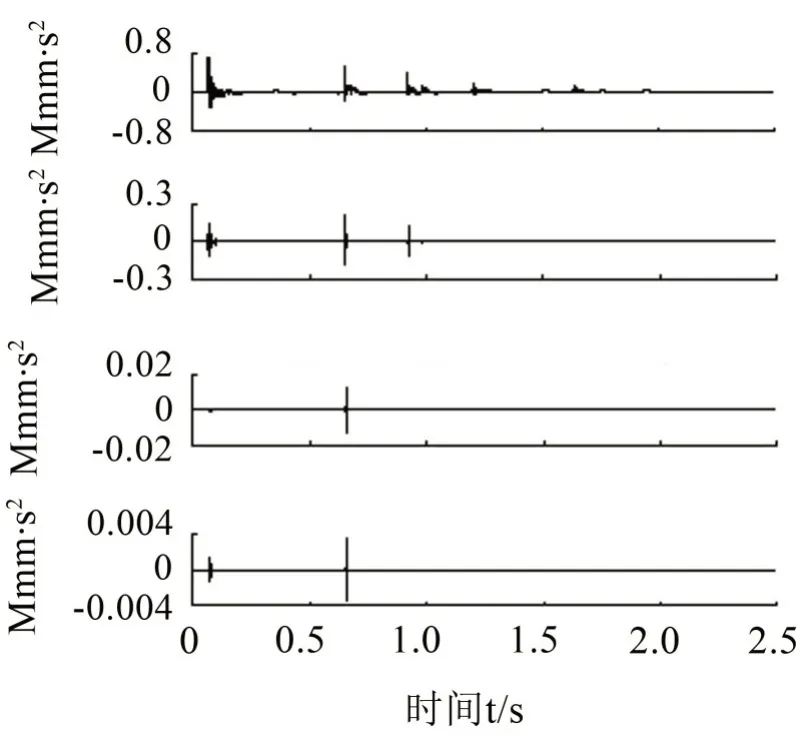
图6 凸起状态下罐道振动信号小波包分解后结果
与正常情况下相比,4个频带下罐道凸起和错位2种状态在0~0.2秒间振幅变化比较大,正常状态相对比较平稳,但凸起和错位2 种状态下的振动信号区别不是很明显。为便于对3 种罐道状态进行区分,分别求各频带能量熵、奇异值、标准差、峰峰值、波形指标、峰值指标,构成一个24 维的特征向量T,并将T归一化。
图8-图10分别为正常状态、罐道凸起、罐道接头错位3种状态下提取一组的特征向量。纵坐标表示归一化后的故障特征值,单位为1,横坐标依次表示1~24个特征。
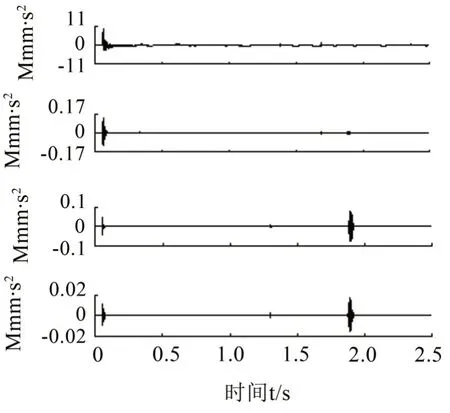
图7 错位状态下罐道振动信号小波包分解后结果
令A1,A2,…A24分别为各频带归一化后特征向量作为条件属性,以罐道无故障、凸起、错位3 种状态作为决策属性,分别用1,2,3代替,建立邻域粗糙集决策表。对条件属性每列进行“极大值-极小值”法进行归一化处理后,按如下公式计算邻域半径

式中:Std(Ai)为每一列条件属性的标准差;λ为一设定的参数,用来根据分类精度调整邻域大小。
表1为经过归一化处理后的决策表。邻域粗糙集的约简结果取决于邻域半径的大小和重要度下限。根据相关研究,重要度下限设为接近0的数。
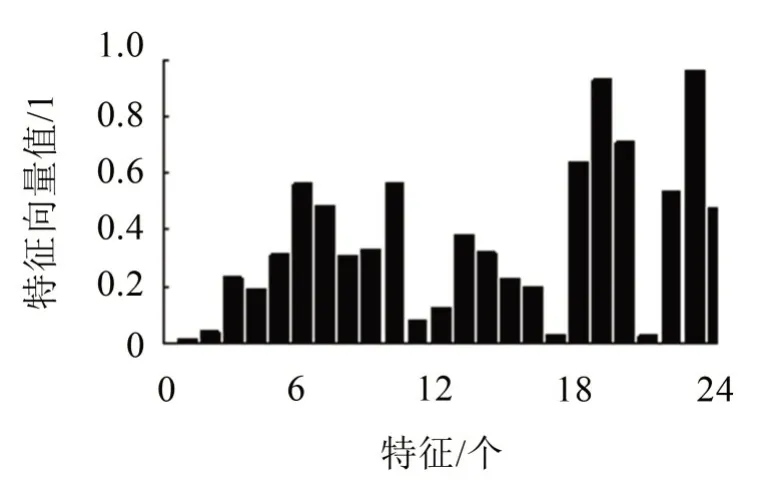
图8 罐道正常状态特征向量图
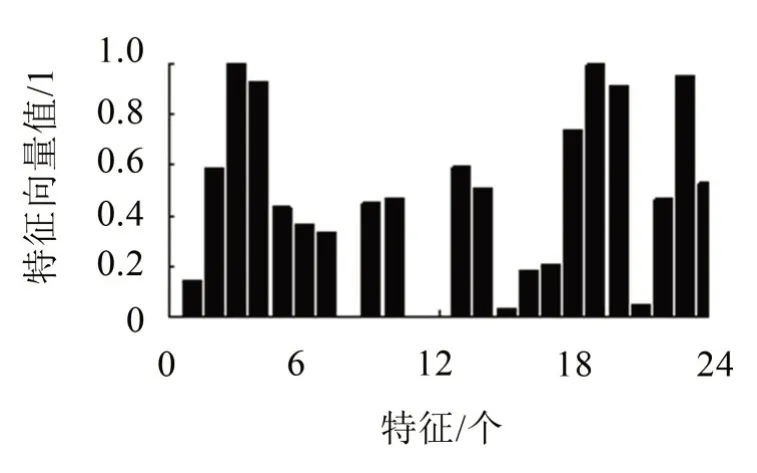
图9 罐道凸起特征向量图
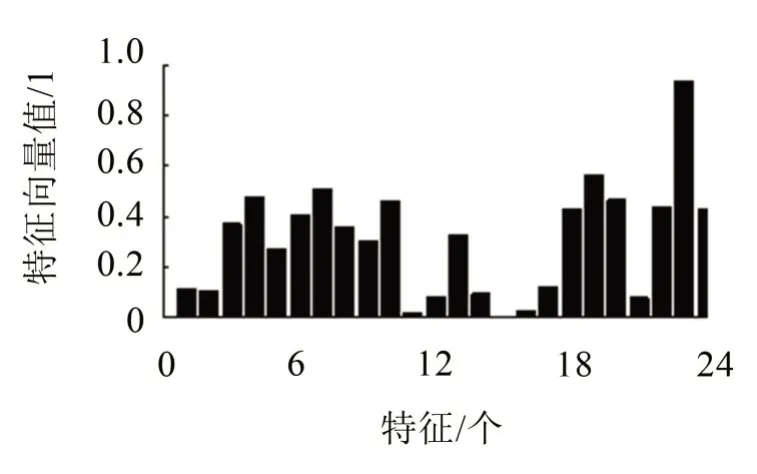
图10 罐道接头错位特征向量
λ设为0.1,重要度下限为0.001,通过能有效处理连续属性和缺省不完整数据的决策树C4.5算法来获取决策规则。对决策表1经过邻域粗糙集约简,删除冗余属性后的剩余属性及对应重要度如表2所示。
式中:A1,A3——频带1 标准差、波形指标;A15——频带4 波形指标;A20——频带4 奇异值;A22——频带2的能量熵。24个原始特征约简后,剩余敏感特征集按属性重要度排序分别为:A1>A22>A15>A20>A3。

表2 约简剩余属性及对应重要度
4.3 模式识别
为比较布谷鸟搜索算法(CS)与其他寻优算法对SVM 分类性能的影响,分别用粒子群法、遗传算法(GA)、萤火虫算法(FA)、布谷鸟搜索算法(CS)对SVM惩罚参数C和核函数参数g进行寻优。因数据样本量较少,采用交叉验证法计算法分类精度,核函数选用试用范围较广、具有较宽收敛域的径向基函数(RBF)。表3为4种寻优算法参数设置。
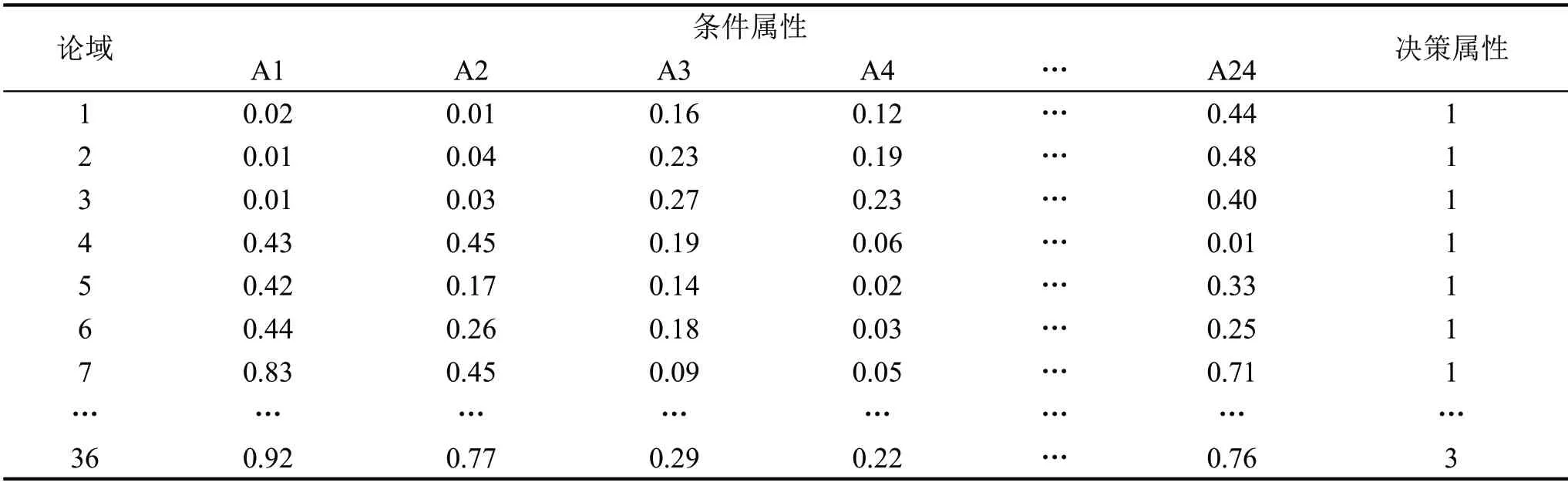
表1 归一化后邻域粗糙集决策表
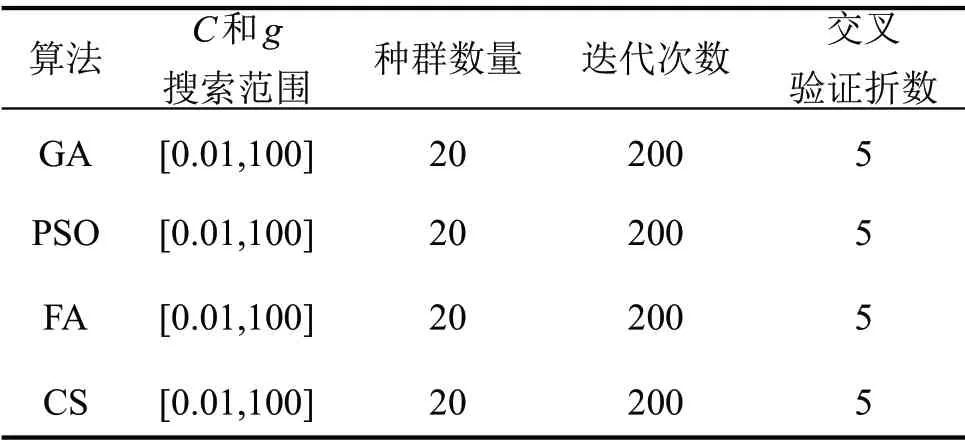
表3 寻优算法参数设置
利用测试组样本进行测试,表4为基于不同寻优方法优化后对SVM 分类正确率和运行时间的结果。
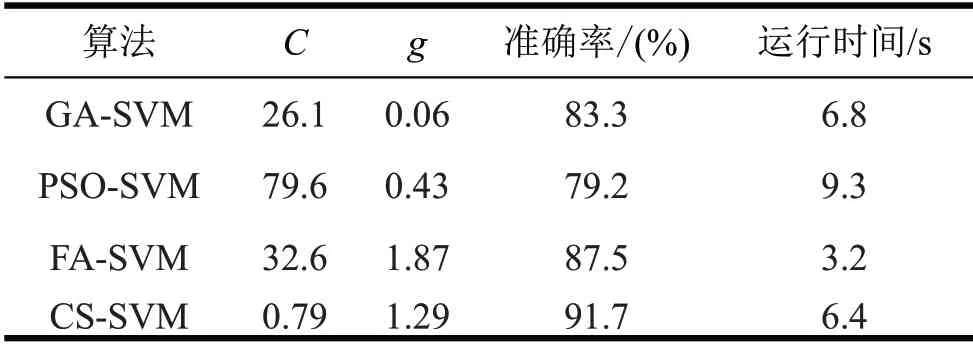
表4 不同分类方法性能对比
5 结语
(1)针对悬挂油缸失效、罐笼偏载状态下滑动罐耳与罐道正常、凸起、错位三种状态模式识别问题,首次提出了以小波包分解后各频带能量熵、奇异值、标准差、波形指标作为原始特征值,邻域粗糙集约简获得敏感特征集,并以布谷鸟搜索算法优化支持向量机的方法进行模式识别的方法。实验验证了该方法的有效性,分类准确率达91.7%。
(2)通过邻域粗糙集去除不相关和冗余特征后,频带1的标准差和频带2的能量熵重要度最强,可作为区分罐笼偏载状态下罐道冲击的主要特征向量;
(3)分别以粒子群法、遗传算法、萤火虫算法、布谷鸟搜索算法对支持向量机参数寻优,从诊断结果来看,布谷鸟搜索算法优化后的支持向量机分类准确率最高,运算时间仅次于FA-SVM,更适合做罐笼偏载状态下滑动罐耳与罐道正常、凸起、错位的模式识别方法。
