球式自动平衡装置的动力学特性分析
2019-10-22王忠诚陈海卫
王忠诚,陈海卫,王 志
(1.江南大学 机械工程学院,江苏 无锡214122;2.江苏省食品先进制造装备技术重点实验室,江苏 无锡214122)
旋转机械的振动主要是由偏心不平衡引起的。倘若系统有固定的偏心,可利用动平衡或静平衡的方法达到平衡。然而,在许多情况下,不平衡质量的分布会随时间的变化而变化,从而很难预测这种不平衡会在何时何地发生。球式自动平衡装置是自动定心型的平衡装置[1],不需要外部提供任何能量,只利用系统响应所形成的能量来驱动滚球的移动和分布,从而自动地消除转子的不平衡[2-3]。Rajalingham,Bhat和Rakheja[4]研究了球式自动平衡装置无衰减动力学系统的稳定性,并利用线性化后的运动方程来确定系统稳定转速的范围,从而得出,在达到系统的临界转速时转子的振动减小。Chung和Ro[5]采用极坐标的方式并利用拉格朗日方程推导出了球式自动平衡装置自治系统的运动方程,并对球式自动平衡装置的稳定性和动力学特性进行了分析。谭青[6]建立了单自由度振动系统球式自动平衡装置实验台,并通过仿真与实验验证了球式自动平衡装置的减振性能。
本文构建了双自由度球式自动平衡装置的平面模型,并对自治系统进行稳定性分析,指出系统达到稳态转速的条件。
1 球式自动平衡装置的振动模型
本文的研究对象是一个平面放置的偏心旋转盘和一个由两个平衡球组成的自动平衡装置模型,如图1所示,包括圆盘,平衡球和悬挂系统。圆盘以恒定的角速度旋转。点W表示圆盘的质量中心(不包括平衡球)且与旋转中心C不重合,偏心距为ε。平衡球在固定的轨道中周向运动,轨道半径为R。
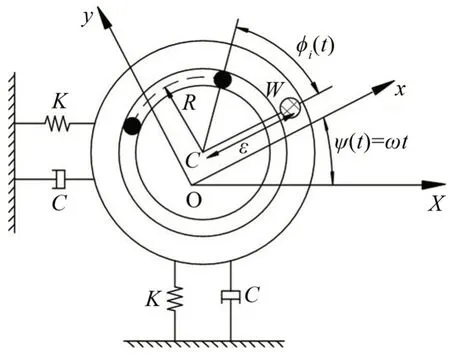
图1 球式自动平衡装置模型
本文所采用的符号(单位均采用国际标准单位):O、C——圆盘中心静止时和运动时的位置
X、Y——C点在水平和竖直方向的坐标
C、K——圆盘在水平和竖直方向的阻尼系数和刚度
M、m——偏心圆盘与平衡球的质量
R——平衡球周向运动的轨道半径
ε——偏心距
ψ、φi——圆盘转角、第i个滚球的转角
D——球的粘性阻尼系数
M0——系统总质量(M0=M+2m)
圆盘在XY平面中运动,系统的广义坐标为:
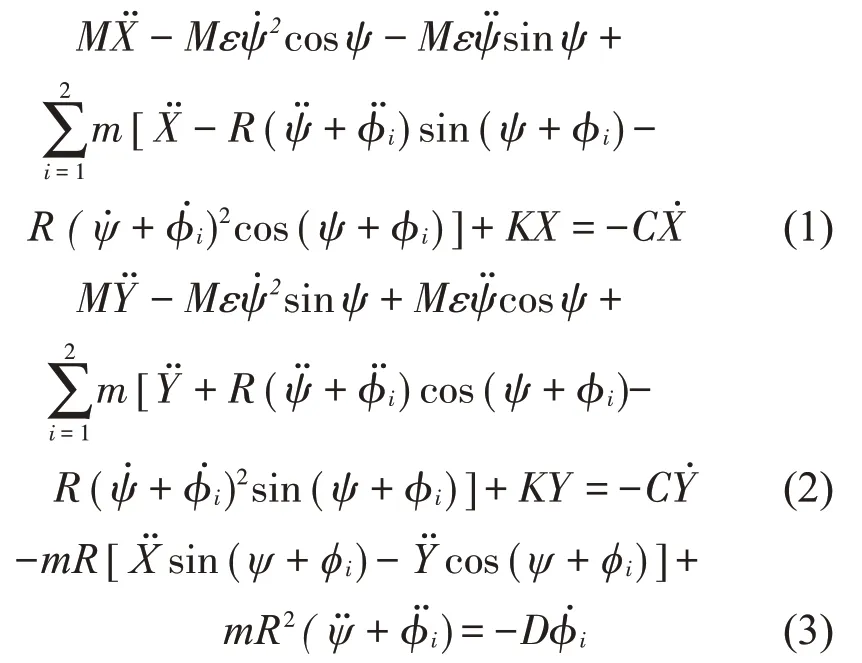
利用拉格朗日方程推导得到系统的运动微分方程
为了简化计算,上式(1)、式(2)、式(3)中的X、Y、t可通过下面的公式转化为无量纲形式的X0、Y0、t0,
定义如下的无量纲参数
ωn是系统的固有频率
系统的微分方程可以转化为如下的无量纲形式
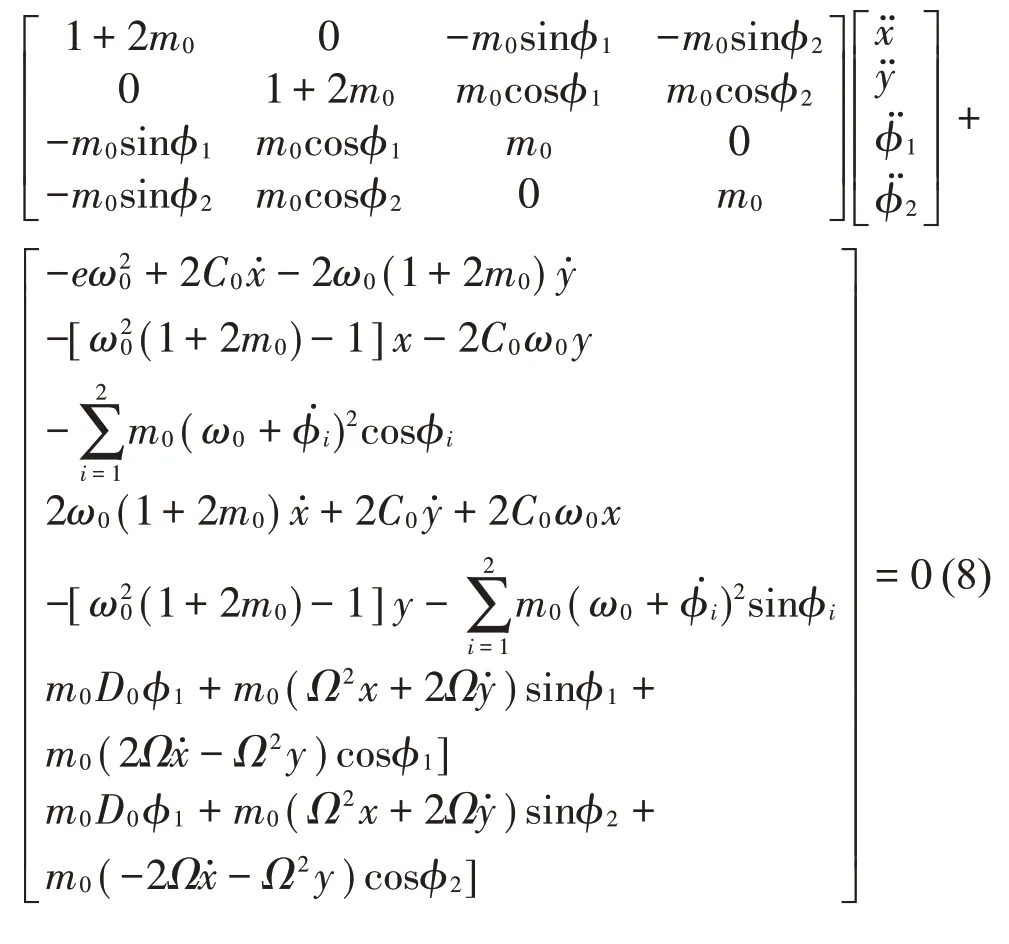
上述得到的模型为非自治系统,其稳态解为周期解。因为周期解的讨论较为困难,所以这里进行自治系统的转化,进而讨论其平衡点的稳定性。采用下述旋转坐标变换[7]的方法将上述系统转换为自治形式

将旋转坐标带入式(4)、(5)、(6),得到系统的自治形式
2 自治系统分岔与稳定性分析
本节中对式(8)得到的系统进行稳定性进行分析。首先,通过计算求得系统在不同条件下的稳态解;然后利用AUTO软件[8]对各个解进行稳定性分岔分析。
2.1 稳态解
系统具有稳态解时,所有关于时间的导数均为零。当系统的质心处在原点时,系统会有一个平衡的稳态解,再根据公式(8)可得
在下面的分析计算中,将公式(9)记为解1。
当系统的质心不在原点,即x,y≠0时,系统会有不平衡的稳态解。根据公式(8)可得

在k=0时对应系统的第一个不平衡的稳态解,也就是说两个平衡球是重合的状态(不考虑球的碰撞和球之间的相互作用)。将k=0 及式(10)代入式(8),从而可以得到
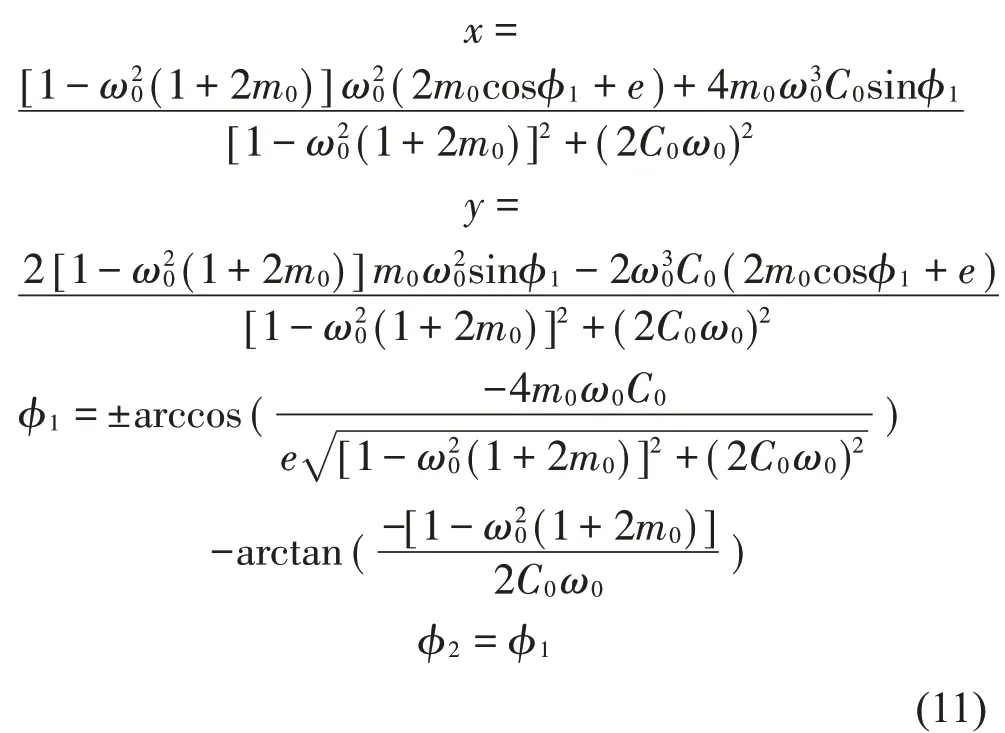
在下面的计算分析中,将式(11)记为解2±。
在k=1时是系统的第二个不平衡的稳态解,此时,2 个平衡球处于相对的位置,与旋转中心C在一条直线上。将k=1及式(10)代入式(8),可以得到
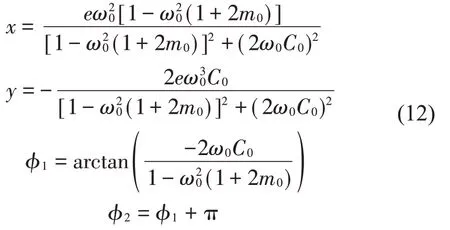
在下面的计算分析中,将公式(12)记为解3。
(a)为解1,两个平衡球关于偏心对称;
(b)为解2±,两个平衡球重合;
(c) 为解3,两个平衡球与旋转中心在同一直线上。
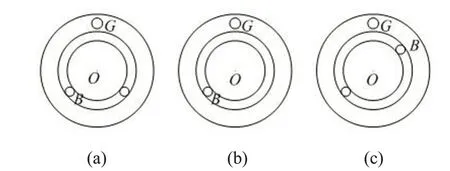
图2 三个解的示意图,G代表偏心,B代表平衡球
2.2 数值分岔结果
利用数值分岔软件AUTO 对式(8)得到的自治系统进行稳定性分析。AUTO是在Linux/Unix系统下运行的软件,本文使用的版本为AUTO07p。当发生鞍-结分岔时,系统在平衡点处具有一个0特征值。当发生霍夫分岔时,平衡点处系统存在一对共轭复根。该复根穿越了复平面中的虚轴,系统的平衡点也由此变得不稳定。计算过程中各参数的默认值及变化范围见表1

表1 计算参数
进而可以得到无量纲参数默认值以及变化范围如表2
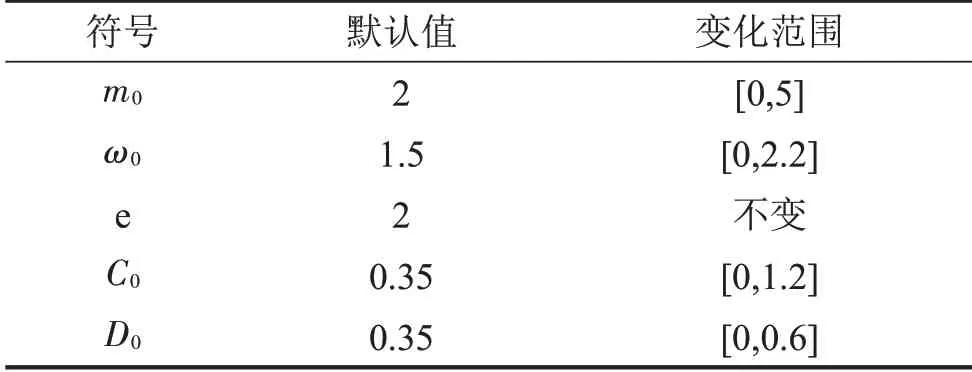
表2 无量纲参数
上述所得的稳态解的存在需具备一定的条件。对于解1,其存在的条件为

也就是说,为了达到平衡状态,平衡球的总质量与轨道半径的乘积要大于偏心质量与偏心距的乘积。当公式(13)两边相等时,φ1=π,φ2=-π。说明此时两个平衡球相对于偏心都处于相对状态,即两平衡球重合,恰好对应解2±。在Mε>2mR时,解1不存在,即在两个平衡球重合后,平衡的稳态解1开始不存在,这是典型的叉形分岔。
图3是m0的单参数分岔图,在图中,纵坐标为AUTO 默认的L2范数实线为稳定解,虚线为不稳定解,叉形分岔点用△标记,霍夫分岔点用*标记。从图3可看出,随着m0的增大,系统中出现了霍夫分岔现象。经过霍夫分岔点后,自治系统的解也从不稳定转为稳定。平衡解1来自平衡解2±其中之一的叉形分岔PF。
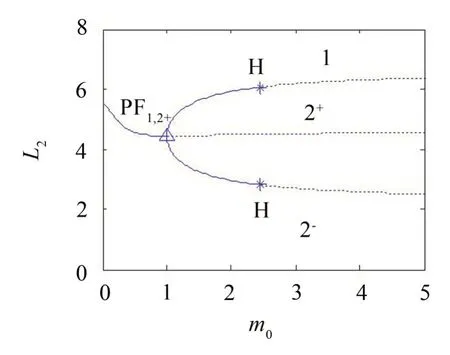
图3 m0单参数分岔分析,PF代表叉形分岔点,H代表霍夫分岔点
对于两平衡球处于重合状态的解2±来说,利用反余弦函数定义域绝对值小于等于1 的性质,联合式(11)可以得到
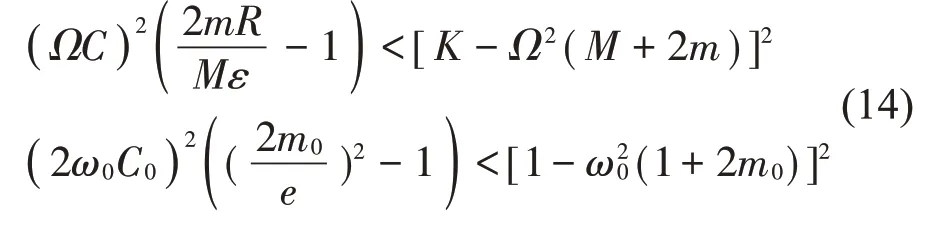
图4(a)和图4(b)给出了针对无量纲参数ω0与m0的双参数分岔结果。在图4(a)和图4(b)中,实线对应的是鞍结分岔PF 或者叉形分岔SN,虚线对应的是霍夫分岔H;区域一对应的是平衡解1,区域二对应的是解2±,其余区域没有对应的稳态解。
鞍结分岔、叉形分岔和霍夫分岔曲线交于一点,即为上文提到的叉形分岔点,该点的坐标为

该点坐标转化为有量纲的形式为

在图4(a)中,字母的下标对应的解的序号;在图4(b)中,下标代表该区域是否处于稳定状态(s代表稳定,u 代表不稳定)。从图4(a)和图4(b)中可以得到,对于解1来说,只有当m0>1时存在,且只在区域二中是稳定状态;对于解2+来说,在m0<1 时,解2+一直是稳定的解,而在m0>1 时,只有当ω0比较小时,即在鞍结分岔曲线SN2±的左侧,系统才会处于稳定状态;对于解2-来说,系统一直处于不稳定状态。
图5进一步给出了其他相关物理参数的双参数分岔分析,图5(a)、图5(b)分别表示随着ω0的增加,稳定边界与球阻尼D、系统阻尼C的无量纲参数D0、C0的关系。区域一对应的是平衡解1,区域二对应的是解2±,其余区域没有对应的稳态解。在这2种情况中,在经过鞍节分岔点SN 时解2±开始变得不稳定,而在经过霍夫分岔点H时平衡解1开始变得稳定。
对于解3,无论各参数怎样取值,式(12)总有意义,即解3一直存在(注意:和解1一样,通过交换φ1和φ2可以得到两种形式的解,因为两个平衡球是完全一样的,所以两种形式的解是等价的)。
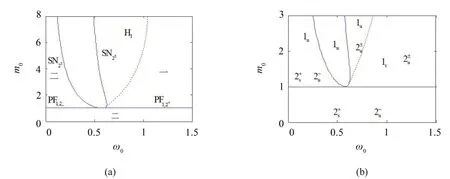
图4 ω0 -m0双参数分岔分析
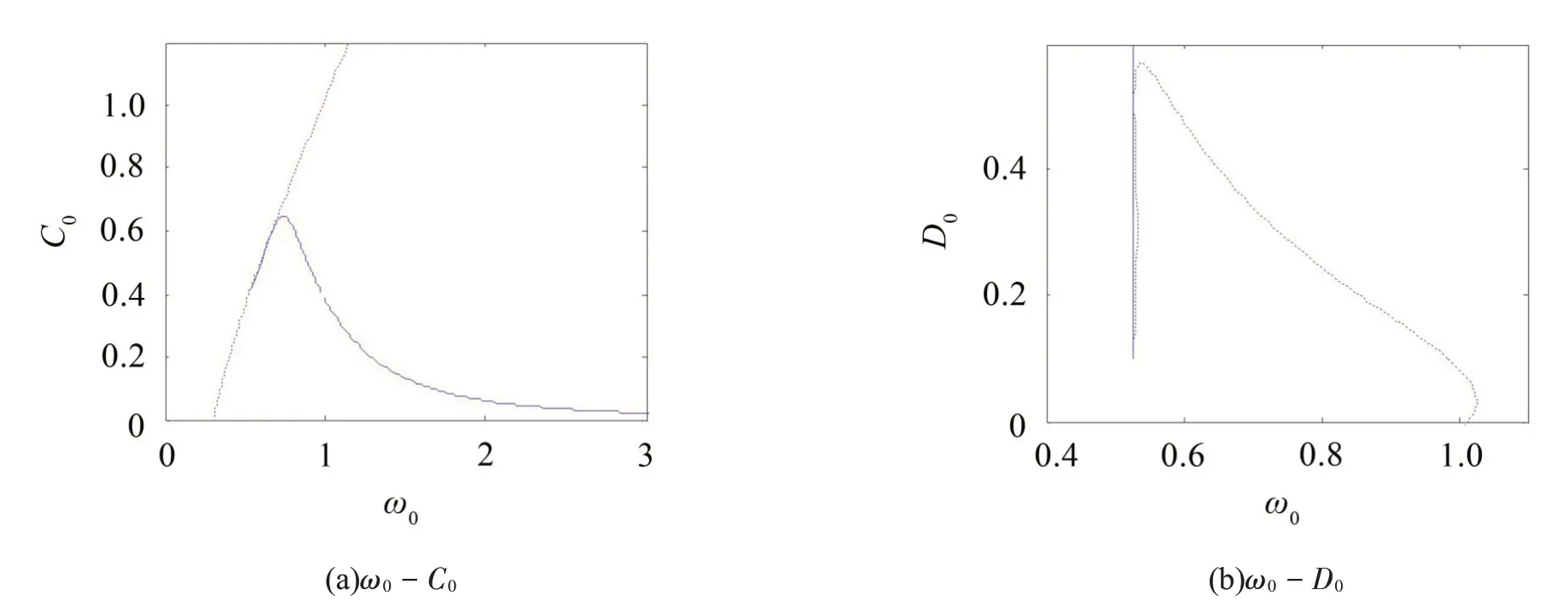
图5 双参数分岔分析
3 分岔结果的仿真验证
在本节中,应用MATLAB软件进行数值仿真并验证上一节的分岔结果。各项参数采用表2中的默认值,其他参数的初值设定为

图4得到了系统不同解的区域以及稳定、不稳定区域,图6给出了分岔图中不同区域的数值仿真结果,即径向振动随时间的变化。
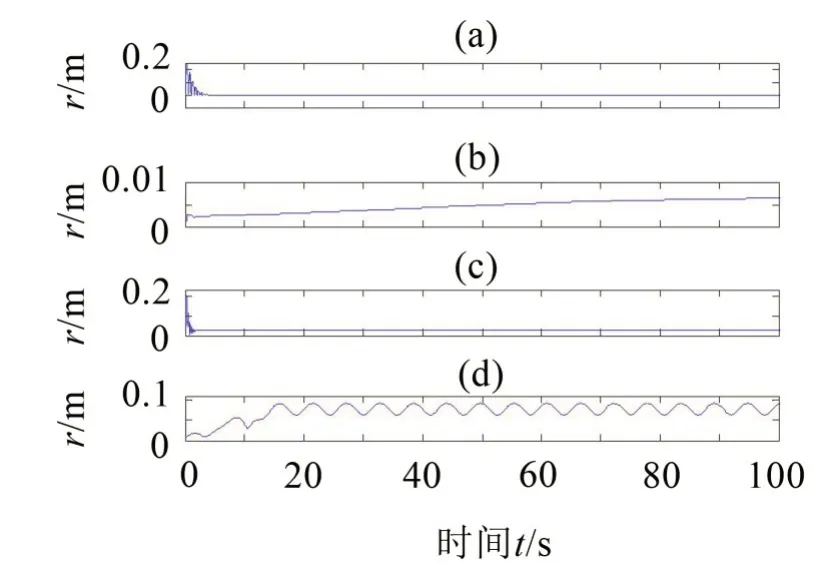
图6 数值仿真图
图6(a)给出了高转速(ω0=20)以及m0=2 时的仿真结果,该情况对应图4(a)中平衡解1的霍夫分岔边界H1的右侧,且最终实现了完全平衡的效果。图6(b)给出了低转速ω0=0.3 以及m0=2 时的仿真结果,长时间的数值仿真系统都未能达到平衡的效果。图6(c)给出了平衡球与偏心质量比值较小(m0=0.5)以及ω0=4的仿真结果,对于给定的偏心率e=2,此时并不满足平衡条件(13),如同分岔分析所预测的一样,解2+是稳定的,系统的径向振动最终稳定在0.025 77。图6(d)给出的是m0=4、ω0=0.6的仿真结果,图6(d)可以得知,此时系统没有稳定的平衡,在该条件下系统具有振荡的径向振动。
4 结 语
本文建立了双自由度振动系统的球式自动平衡装置的模型,并对其进行了非线性分岔分析,给出系统的双参数分岔分析图,从而得到系统的稳定区与不稳定区。最后在MATLAB 中进行数值仿真验证分岔结果,得到不同参数值情况下的平衡结果。从中可以得到以下结论:
(1)从图3和图4可以得到,若每个平衡球的质量与偏心质量之比m0大于偏心率e的一半,且随着转速的增加,系统在经过霍夫分岔后即可实现平衡;
(2)在每个平衡球的质量与偏心质量之比m0小于偏心率e的一半时,此时两平衡球重合,最终系统的振幅会稳定在某个特定的值,从而实现动态平衡。
