全电驱动工程车辆故障诊断与处理策略研究
2019-10-21江和耀刘家胜陆银
江和耀 刘家胜 陆银

摘要:针对电动汽车电气结构复杂、故障率较高的问题,为了提高电动汽车行驶的安全性,以及帮助维修人员准确找到故障点,以某型采用全电力驱动的大型工程车辆为例,设计了整车控制器的故障诊断及处理策略,采用分级式故障诊断及处理方法,设计了每个故障等级下的处理软件算法,最后进行了仿真验证。
关键词:故障诊断,故障分级,故障处理
Abstract: The electric structure of electric vehicle is complex and the filure rate is high. Designing fault diagnosis and processing strategy(FDPT) of vehicle controller unit(VCU) can not only improve the safety of electric vehicle, but also help maintenance engineer to find fault points accurately. In this paper, a FDPT of VCU is designed for a large engineering vehicle driven by electric power. The hierarchical method of FDPT is adopted, and a software algorithm for each fault level is designed. Finally, the simulation is carried out.
Key words: Fault Diagnosis; Fault Grading; Fault Processing
1 概述
我国电动汽车工业起步较晚,电动汽车技术处于快速发展期。电动汽车相对传统燃油动力汽车,机械结构方面较为简单,传动和运动部件相对较少,但电气结构更加复杂,故障率升高[1],但维修人员对电动汽车的认识程度低,而且电动汽车高压危险性比较大。整车控制器故障诊断与处理可以提高客户对电动汽车的认识,故障代碼有助于维修人员准确找到故障点,使维修切入点比较快,整车控制器对故障的分级和处理能够提高电动汽车行驶的安全性[2-3]。
现代汽车故障诊断技术的发展趋势主要有以下几个方面[4]:(1)检测设备智能化,特点是虚拟仪器与信号处理技术的广泛使用;(2)资料数据在线化,特点是交互式电子技术手册的使用;(3)故障诊断信息的网络化,表现为现场诊断和远程诊断相结合;(4)数据反馈实时化,可以把诊断过程产生的数据文件回传到汽车生产商指定的数据库;(5)故障诊断专家系统,特点就是在必要时呼出存储在计算机中专家们的知识,使初学者也能得出接近专家们的判断。
2 分级式故障诊断及处理策略
某大型工程车辆采用全电力驱动,底盘动力总成部分主要包括柴油发电机组、驱动器、驱动电机、减速器等,整车电气子系统较多,发生故障的点位及概率增加。柴油发电机组和各个驱动器将各自的故障信息通过CAN通信上报给整车控制器,由整车控制器进行故障诊断及处理,采用分级式故障处理策略,诊断方式及诊断操作过程如下:
(1)一级故障:该等级故障为切断驱动器高压故障。整车控制器接收到四个驱动器或发电机组之中任何一个子系统上传的一级故障后,整车控制器通过控制信号的输出关闭所有驱动器使能并切断驱动器高压供电。
(2)二级故障:该等级故障为请求关机故障。当整车控制器接收到四个驱动器和发电机组任何一个子系统上传的二级故障以及整车控制器检测到发电机组和任何一个驱动器的通讯故障后,将控制四个驱动电机无转矩输出,车辆将不能行驶。驾驶员或技术人员可根据具体的故障情况来选择关机与否。
(3)三级故障:该等级故障为降功率故障。当整车控制器接收到四个驱动器或发电机组上传的三级故障,将限制驱动电机转矩输出为原来的一半,从而达到限制系统功率输出。当车辆出现该等级故障时驾驶员可继续低速行驶,跛行返回。
分级式故障处理实现功能如图1所示,分级式故障处理控制策略如图2所示
3 故障处理软件设计
按照网络通讯协议要求,动力系统各零部件ECU当前状态码及故障码定义如表1。
3.1 一级故障
在驱动器1(MC1)、驱动器2(MC2)、驱动器3(MC3)、驱动器4(MC4)、发动机(Engine)、发电机(Genarator)当中任何一个零部件出现一级故障,都会关闭所有驱动器使能并切断高压。由表1可知,ECU状态码中基本状态位为101同时故障级别位为10,则该状态为一级故障,具体处理如下所示:
3.2 二级故障
在驱动器1(MC1)、驱动器2(MC2)、驱动器3(MC3)、驱动器4(MC4)、发动机(Engine)、发电机(Genarator)当中任何一个零部件出现二级故障或整车控制器检测到以上任一零部件的通讯故障,都会控制电机无转矩输出。由表1可知,ECU状态码中基本状态位为101同时故障级别位为01,则该状态为二级故障,具体处理如下所示:
CAN通信检测流程如下:
(1)当CAN消息触发时,进入到流程图,此时CAN通讯正常,并设有一变量,按MATLAB计算周期执行变量累计;
(2)当变量达到一定数值(5个周期)时进入CAN通讯故障状态,此时将上报CAN通讯状态为异常,直到有消息触发后,才返回CAN通讯正常状态,此时变量清0并且执行变量累计;
(3)若在变量处于一定数值范围以内期间,有CAN消息触发,将再次进入CAN通讯正常状态,此时变量清0并且执行变量累计。
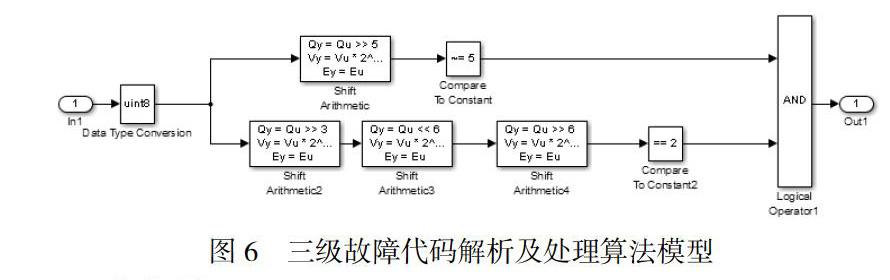
3.3 三级故障
在驱动器1(MC1)、驱动器2(MC2)、驱动器3(MC3)、驱动器4(MC4)、发动机(Engine)、发电机(Genarator)当中任何一个零部件出现三级故障,都会限制电机转矩输出为原先的一半。由表1可知,ECU状态码中基本状态位为非101同时故障级别位为10,则该状态为三级故障,具体处理如下所示:
4 仿真验证
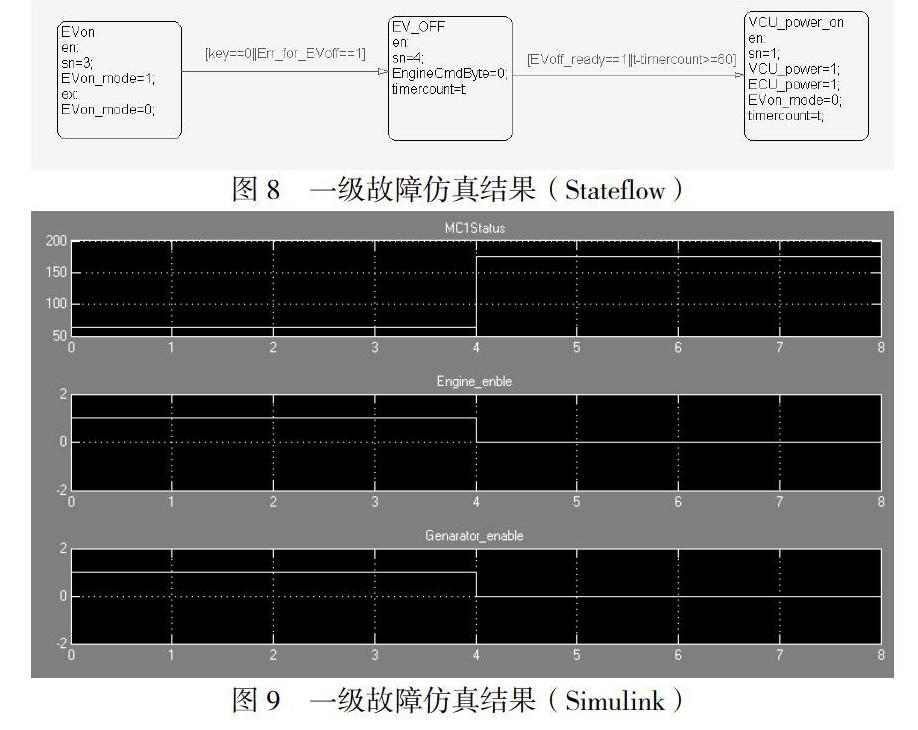
以MC1出现一级故障为例,模型仿真如图7所示,当MC1 Status为176时,MC1定义为一级故障。
此时一级故障信号Err_for_EV_off为 1,系统会关闭发动机系统使能,切断高压。
图中第一条曲线为MC1状态码,第二、第三条曲线分别是Engine_enable和 Genarator_enable,当MC1状态码为176时Engine_enable和 Genarator_enable关闭。
5 结论
本文針对某型采用全电力驱动的大型工程车辆,设计了整车控制器的故障诊断及处理策略,采用分级式故障诊断及处理方法,将柴电机组及各个驱动器上传的故障分为三个等级,并设计了每个故障等级下的处理软件算法,最后进行了仿真验证。从仿真结果可以看出,故障分级诊断与处理方法正确合理。
参考文献:
[1] 张文强,陈晨,刘文军,李大鹏.基于CAN总线的电动车故障诊断系统设计与实现[J].信息通信, 2018(5): 101-102.
[2] 安晓峰,尹磊,陈立建.电动汽车的故障诊断系统[J].客车技术与研究, 2016(3): 48-51.
[3] 姜明昌,戴能红,王春芳,于海燕,孙飞.电动汽车整车控制器开发[J].汽车工程师, 2015(7): 21-23.
[4] 鲍健.汽车故障诊断技术的现状与发展趋势[J].工业技术, 2012(5): 110-111.
作者简介:
江和耀,1984年生,男,汉族,2011年毕业于吉林大学,研究生学历(硕士),中国船舶重工集团公司第七一三研究所,工程师,研究方向:自动控制,电机及驱动系统设计与仿真,分布式驱动控制算法研究。(联系电话:13733891015)
刘家胜,1979年生,男,汉族,2004年毕业于哈尔滨工业大学,研究生学历(硕士),中国船舶重工集团公司第七一三研究所,高级工程师,研究方向:动力与传动。
陆银,1987年生,女,汉族,2011年毕业于浙江大学,研究生学历(硕士),中国船舶重工集团公司第七一三研究所,高级工程师,研究方向:结构设计及优化。
