永磁无刷直流电机霍尔传感器故障诊断与容错运行新方法
2019-10-21李宏伟李林超张鹏
李宏伟 李林超 张鹏

摘要:目前,针对无刷直流电机无法正常运行的情况已提出了基于振动和定子电流频谱分析的故障检测和诊断方法,同时也有霍尔传感器FTC方案。本文提出在霍尔传感器发生故障的瞬间进行精确的诊断,并保证无刷直流电机持续稳定运行的方法。根据霍爾信号的持续时间是否出现异常来判断是否出现霍尔传感器故障,同时,切断出现故障的霍尔传感器,采用正常工作霍尔传感器的信号预测故障霍尔传感器的信号,使无刷直流电机进行正常换相。
关键词:永磁无刷直流电机;霍尔传感器故障诊断;容错控制;Simulink仿真
引言:文章围绕一个霍尔传感器出现故障和两个霍尔传感器出现故障的情况进行了详细的分析和仿真,提出了一种霍尔传感器实时故障分析诊断与容错运行的方法。本容错运行方法利用正常工作霍尔传感器高电平与低电平的时间计算,并模拟故障霍尔传感器高、低电平时间,在故障霍尔传感器电平不改变的情况下也可以使电机正确换相。实验结果表明,通过正常工作的霍尔传感器可以较好地判断故障霍尔传感器电平变化的情况,进而控制晶体管的导通与关断,保证无刷直流电机的正常换相。采用本文的容错方式运行可以保证无刷直流电机运行驱动系统在霍尔传感器故障的情况下可靠运行,对提高无刷直流电机驱动系统的可靠性具有重要的应用意义。
1 基于霍尔传感器的BLDC驱动系统
基于霍尔传感器的永磁无刷直流电机(BLDC)驱动系统的基本结构,此结构由转速PI调节器、电流幅值限制模块、电流检测模块、电流PI调节器、PWM及换相模块、位置检测模块、转速检测模块和永磁无刷直流电机组成。无刷直流电机一般采用三相逆变器供电和两两导通的控制方式,需要三个霍尔传感器对电机转子位置进行实时检测,在一个电周期内提供六路换相信号实现电机换相。三个霍尔传感器分别独立工作,在一个电周期内可发出相位相差120°的方波信号,用以确定转子位置,进而控制晶体管开断.
2 霍尔传感器故障诊断及容错控制
2.1 一路霍尔传感器出现故障
当一路霍尔传感器出现故障时,可以分为三种情况:H1出现故障、H2出现故障、H3出现故障。本文以H3出现故障为例进行分析。当霍尔传感器H3出现故障时,霍尔信号与晶体管导通时间如图1所示。此时霍尔传感器H3输出的信号始终为高电平(也可以始终为低电平),在一个周期内,有一半的信号会因其出现故障而发生错误。要解决此故障,首先应正确诊断霍尔传感器故障类型。不管是在电机起制动过程还是稳态运行时,考虑到电机转速相对于换相区间可以认为是准静态量,因此,通过对比下一个区间与上一个区间的宽度,来诊断霍尔传感器是否发生故障。以0~π/3为例,当电机运行至0时,霍尔传感器H3正常输出为低电平,主电路V6切换至V2,并计时t2时长,若t2>nt1,霍尔传感器H3输出信号仍没有变化,则认为此传感器发生故障。其中n为补偿系数,根据电机实时运行状态设定。当电机减小负载或起动时,n应适当减小;当电机增加负载或制动时,n应适当增大。当电机匀速运行时,转速不变,即t1+t5+t6=t2+t3+t4,此时取t2=xt1,x=1;当电机减小负载或起动时,转速逐渐增加,即t1+t5+t6>t2+t3+t4,此时取t2=xt1,x<1;当电机增加负载或制动时,转速逐渐减小,即t1+t5+t6
图1.霍尔传感器H3出现故障时,霍尔信号与晶体管导通时间:
2.2 两路霍尔传感器同时出现故障
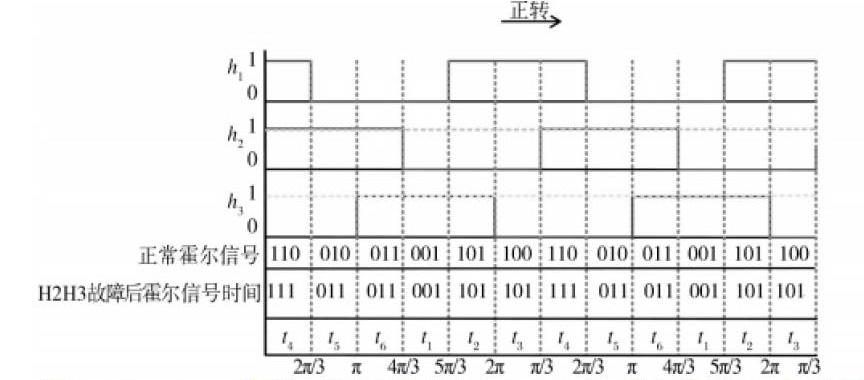
当两路霍尔传感器发生故障时,可能出现三种情况:H1、H2同时发生故障,H1、H3同时发生故障和H2、H3同时发生故障[1]。本文以H2、H3同时发生故障为例进行分析。当霍尔传感器H2、H3出现故障时,霍尔信号与晶体管导通时间如图2所示。此时的霍尔传感器H2、H3输出信号都始终为高电平(也可以都始终为低电平、H2始终为高电平H3始终为低电平或H2始终为低电平H3始终为高电平),在一个周期内,有5/6的信号会因其出现故障而发生错误。与一个霍尔传感器发生故障类似,可以通过对比下一个区间与上一个区间的宽度来诊断霍尔传感器是否发生故障。此时应在一个霍尔传感器发生故障的基础上进一步进行诊断。
图2.霍尔传感器H2、H3出现故障时,霍尔信号与晶体管导通时间:
以4π/3~5π/3为例,当电机运行至4π/3时,霍尔传感器H2正常输出为低电平,主电路V4切换至V6,并开始计时t1,若t6>nt5,霍尔传感器H2输出信号仍没有变化,则认为此传感器发生故障。在已知霍尔传感器H2发生故障的基础上,取t6=xt5,并比较前一个周期t1+t5+t6与t2+t3+t4的时间长短。若t1+t5+t6=t2+t3+t4,此时电机处于匀速运行状态,取x=1;若t1+t5+t6
结论:
简而言之,针对霍尔传感器运行时的故障,提出了永磁无刷直流电机(BLDC)的容错控制运行方式,并验证其可靠性。根据霍尔传感器的故障后时间间隔的异常判断故障类型,在正确判断故障基础上采用霍尔传感器容错运行方式可以使电机保持稳定运行。Matlab/Simulink仿真结果表明,此方法可有效地判断霍尔传感器的故障类型,并可以使电机在霍尔传感器故障的情况下稳定运行。
参考文献:
[1]董亮辉,刘景林.霍尔传感器故障下的永磁无刷电机容错控制及动态性能研究[J].中国电机工程学报,2017,37(12):3602-3611.
[2]李自成,刘新芝,曾丽,等.无刷直流电机转子位置传感器故障断及容错策略[J].微电机,2014,47(4):59-61.
