测量机器人测边多点后方交会法定向精度分析
2019-10-21李汪阳吴伟
李汪阳 吴伟

摘 要 本文结合宁波轨道交通工程项目,简单介绍基于测量机器人测边多点后方交会法,并对其交会图形进行了模拟法精度分析。
关键词 测量机器人;测边后方交會;模拟法
Abstract In this paper, Nningbo Rail Transit Project,introduces the multi-point linear-resection based on measurement robot,and analyze the precision of the multi-point linear-resection figure by simulation method.
Keywords Measurement robot; Linear-resection; Simulation method
前言
随着地下工程建设的不断发展,地铁隧道竖井定向测量作为隧道工程控制测量非常重要的环节,其方法也在不断改进,从早期的几何定向方法如一井定向(联系三角形定向)、两井定向到后来的惯性测量方法如陀螺经纬仪定向,直到新近出现的全站仪测边多点后方交会法定向。随着测量仪器的进步、数据处理手段的发展,定向的方法正在向自动化,高精度方向发展。
Leica TCA2003全站仪测角精度0.5″,测距精度 1mm+1ppm,具有自动照准、锁定跟踪、联机控制等功能。它应用ATR模式自动目标识别,当全站仪发送的红外光被反射棱镜返回并经全站仪内置的CCD相机判别接受后,马达就驱动全站仪自动转向棱镜,并自动精确测定,所以又称为“测量机器人”[1]。测量机器人双轴补偿功能的完善使得俯仰角较大时水平角观测精度能够保证,全站仪自动观测技术能够大大减轻人的劳动强度并提高观测效率。隧道定向测量时测量机器人架设在竖井底部,利用机载的自动观测程序对竖井口的数个坐标为已知的反射棱镜进行观测,从而得到测站的坐标和定向角。该方法曾经成功地应用于宁波轨道交通1号线的定向测量,本文首先介绍该方法的原理,并采用模拟法对该方法的定向精度进行估算。
1 测边多点后方交会
1.1 测边多点后方交会原理
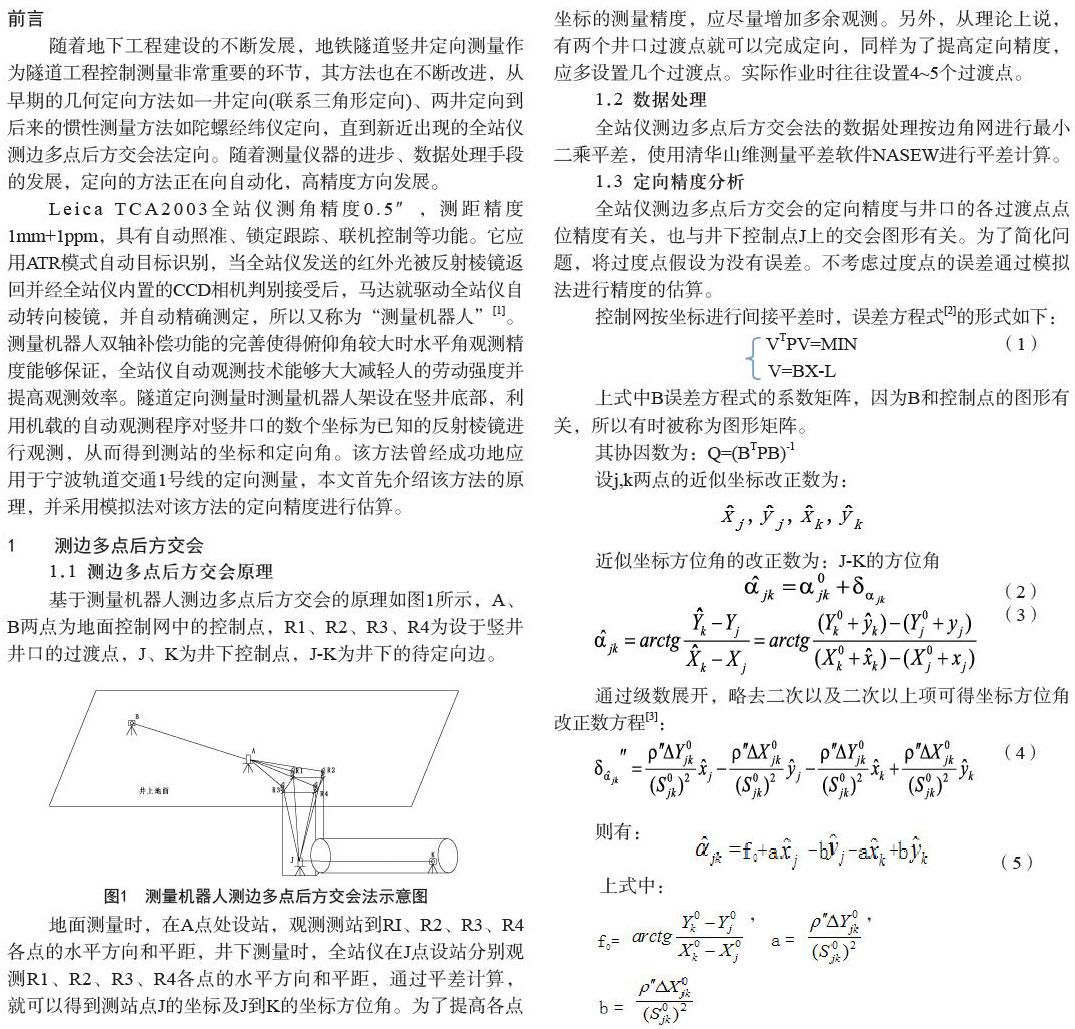
基于测量机器人测边多点后方交会的原理如图1所示,A、B两点为地面控制网中的控制点,R1、R2、R3、R4为设于竖井井口的过渡点,J、K为井下控制点,J-K为井下的待定向边。
地面测量时,在A点处设站,观测测站到RI、R2、R3、R4各点的水平方向和平距,井下测量时,全站仪在J点设站分别观测R1、R2、R3、R4各点的水平方向和平距,通过平差计算,就可以得到测站点J的坐标及J到K的坐标方位角。为了提高各点坐标的测量精度,应尽量增加多余观测。另外,从理论上说,有两个井口过渡点就可以完成定向,同样为了提高定向精度,应多设置几个过渡点。实际作业时往往设置4~5个过渡点。
1.2 数据处理
全站仪测边多点后方交会法的数据处理按边角网进行最小二乘平差,使用清华山维测量平差软件NASEW进行平差计算。
1.3 定向精度分析
全站仪测边多点后方交会的定向精度与井口的各过渡点点位精度有关,也与井下控制点J上的交会图形有关。为了简化问题,将过度点假设为没有误差。不考虑过度点的误差通过模拟法进行精度的估算。
由上述模拟法精度估算结果可知,当设置3个井口过渡点以上且均匀分布时,被定向边的方位角精度<±8″[5]。该作业方法受施工现场测量条件限制较小,能够进行自动跟踪测量,作业灵活性大,颠覆了传统测量方式必须通过人进行观测的方式,改进了测量方法,提高了测量效率。
2 结束语
以上的模拟计算说明,布设3个过渡点及以上网型,使用目前测量仪器进行观测,可以满足地铁隧道工程定向测量的精度要求。
参考文献
[1] 张正禄.测量机器人[J].测绘通报,2001,(05):17.
[2] 武汉测绘科技大学测量平差教研室.测量平差基础[M].3版.北京:测绘出版社,1996:92-95.
[3] 覃辉.测边后方交会的计算公式与精度分析[J].铁路航测,2001年,(2):18-21.
[4] 周西振,尹任祥.测边后方交会精度研究及其应用[N].西南交通大学学报,2006,41(3):344-348.
[5] GB50308-2008.城市轨道交通工程测量规范[S].北京:中国建筑工业出版社,2008.
