基于ISO 1328-1:2013的齿距偏差评定方法
2019-10-18魏建杰石照耀
魏建杰,汤 洁,石照耀
(北京工业大学北京市精密测控技术与仪器工程技术研究中心,北京 100124)
齿轮作为关键零部件,其质量和精度等级直接影响设备的性能、安全和寿命,齿轮测量和精度评价是保证齿轮质量的主要途径[1]。齿轮测试技术及相关软件开发是现代齿轮工程领域的重要工作内容之一[2-3]。
齿轮单项偏差包括齿距偏差、齿廓偏差和螺旋线偏差。齿距偏差是齿轮评定的重要指标,是由于各个齿沿圆周分布不均匀导致的,对齿轮使用的效率、噪声、运动精度和使用寿命有重要影响[4-5]。
ISO 1328-1作为圆柱齿轮核心的精度标准之一,对齿轮单项偏差基本要素的定义、测量位置、误差评定和公差值计算等给出了详细阐述。目前最新的修订版本为 ISO 1328-1:2013[6]。标准 ISO 1328-1:2013 对齿距偏差评定中的定义及符号做了新规定。对齿距偏差评定的实施规范也有相关标准[7-9]。
本文主要研究基于ISO 1328-1:2013的齿距偏差定义及评定方法,给出评定流程,并开发了齿距偏差评定软件,实施齿距偏差评定过程。
1 齿距偏差定义及评定方法
1.1 相关定义
针对齿距偏差评定,圆柱齿轮精度国际标准ISO 1328-1:2013(下文简称“新标准”)中,给出了齿距偏差各项指标的定义和评定方法,包括任一单个齿距偏差(Individual Single Pitch Deviation,fpi)、单个齿距偏(Single Pitch Deviation,fp)、任一齿距累积偏差(Individual Cumulative Pitch Deviation,Fpi)、齿距累积总偏差(Total Cumulative Pitch Deviation,Fp)。在齿距偏差的测量与评定中,标准对各项偏差的数值符号做了严格规定。与ISO 1328-1:1995(下文简称“旧标准”)关于齿距偏差定义的对比[10],如表1所示。“新标准”中给出了齿距偏差评定如图1所示。
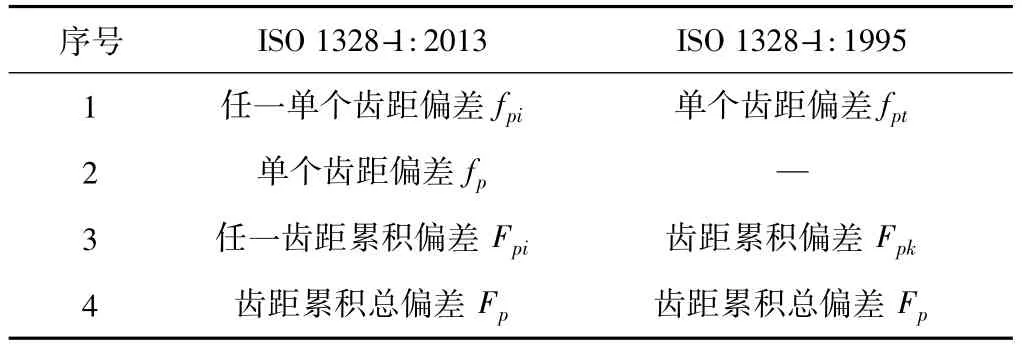
表1 齿距偏差定义对比
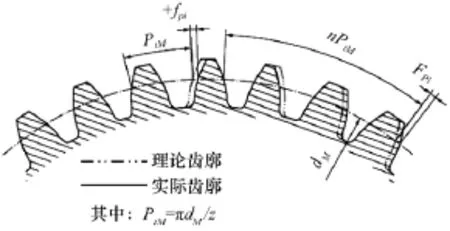
图1 齿距偏差评定
1.1.1 任一单个齿距偏差fpi
沿齿轮测量圆的横截面中的实际齿距与相应的理论齿距的代数差。该数值对应于任一齿面从理论位置到相邻齿的同侧齿面的位移。对于左齿面和右齿面,有与齿数相同的 fpi值。“旧标准”中仅定义为单个齿距偏差 fpt。
对于数值fpi的代数符号,“新标准”中规定如下:在指定的测量方向(顺时针或逆时针),实际齿廓位置比其理论位置更靠近前一齿廓时定义为负(-)偏差;实际齿廓位置比其理论位置更远离前一个齿廓时定义为正(+)偏差。
1.1.2 单个齿距偏差fp
fp是指所有任一单个齿距偏差的最大绝对值,为无符号数值。左齿面和右齿面的fp分别测量。“旧标准”中定义的单个齿距偏差fpt,为有符号数值。
1.1.3 任一齿距累积偏差Fpi
Fpi是指n个相邻齿距的理论弧长与实际弧长的代数差。n从1~z不等;对于左齿面和右齿面,Fpi数值的个数与齿数相同。理论上,它等于n个任一单个齿距偏差的代数和。它对应于任一齿面从理论位置相对于基准齿面的位移。“旧标准”中定义为齿距累积偏差Fpk,其中,k取2~z/8弧段内。
对于读数Fpi的方向和代数符号,“新标准”中规定如下:在指定的测量方向(顺时针或逆时针),实际齿侧位置比基准齿侧更靠近理论位置时定义为负(-)偏差,否则认为是正(+)偏差。
1.1.4 齿距累积总偏差Fp
齿轮同侧齿面所有齿上的齿距累积偏差的最大代数差。
对于读数Fp的方向或代数符号没有做出正负规定。这种正负规定将需要指定任意两齿之间的方向(顺时针或逆时针)的符号。左齿面和右齿面分别测量。
1.2 齿距偏差评定
根据“新标准”,齿距偏差评定[8-10]如图2所示。
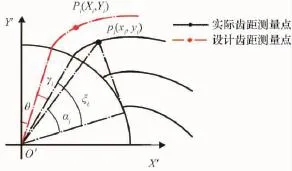
图2 齿距偏差评定
对于任意齿距测量点(xi,yi),根据渐开线原理计算该点对应的展角ξi(rad):

根据渐开线方程,得到对应展角的设计齿廓上的齿距点的坐标(Xi,Yi):

式中,rb为基圆半径;ξi为渐开线展角。
将设计齿廓绕着工件坐标系原点旋转,使设计齿廓依次通过各个齿距测量点。根据式(5)计算设计齿廓通过每个测量点时的转角γi/rad。
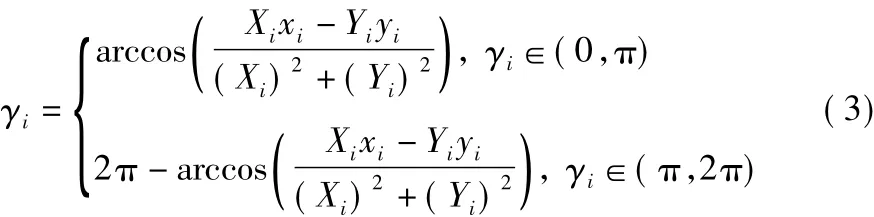
任一齿距累积偏差的数值{Fpi},由式(4)得到。

齿距累积总偏差为

任一单个齿距偏差为

单个齿距偏差为

式中,r为分度圆半径,r=mz/2;m为模数;z为齿数。
1.3 数值舍入原则
齿距偏差评定计算结果的数值或齿距公差计算数值应按以下舍入原则进行取整:如果数值大于10 μm,则圆整至最接近的整数微米;如果数值大于5.0 μm但小于或等于10 μm,则精确到0.5 μm;如果数值小于5.0 μm,则精确到0.1 μm;如果测量仪器的读数为英制英寸,则计算出的数值应转换为1‰英寸,然后按照微米规则进行四舍五入(即用“1‰英寸”用于上述规则中的“微米”)。
1.4 齿距偏差公差允许值
单个齿距公差fpT:

齿距累积总公差 FpT:

式中,A为精度等级。
2 齿距偏差评定软件
根据“新标准”对齿距偏差评定中的相关规定,设计齿距偏差评定流程如图3所示。
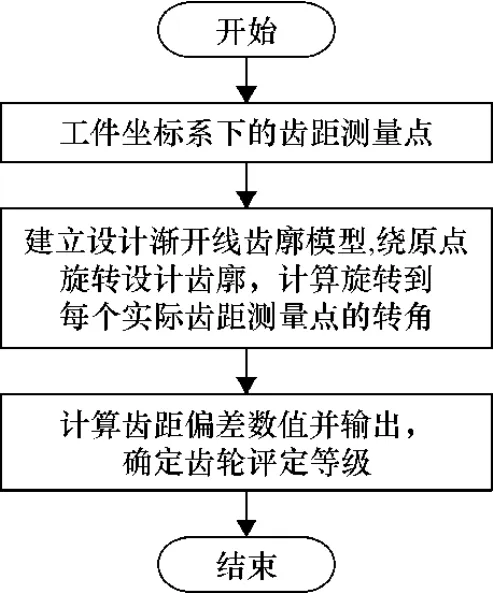
图3 齿距偏差评定流程
根据上述齿距偏差评定方法,采用Matlab进行软件编程,实现对齿距偏差的评定及结果显示。软件共分为4个模块:①参数输入模块;②参数计算模块;③评定曲线显示模块;④评定结果显示模块。
3 试验
被测齿轮为渐开线圆柱直齿轮,基本参数见表2。
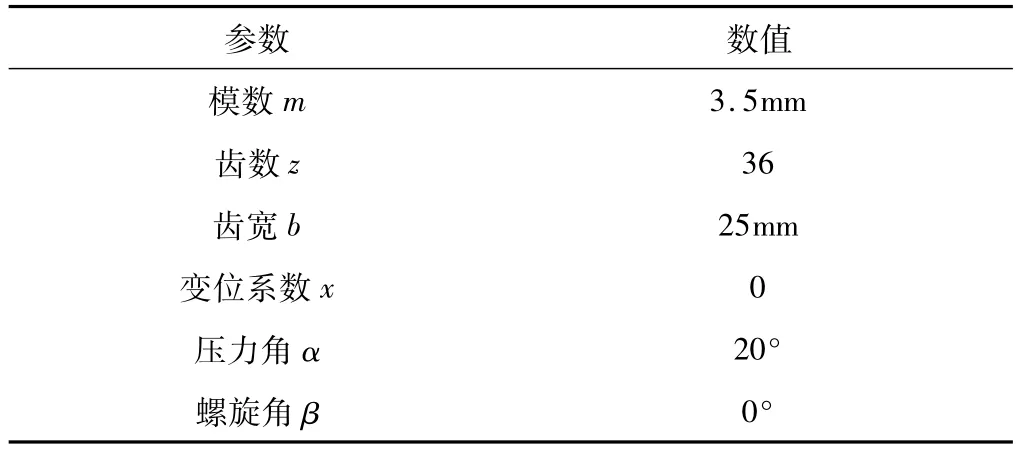
表2 齿轮参数
在齿轮测量中心上进行被测齿轮的齿距偏差测量。其中,部分齿距测量数据如表3所示。
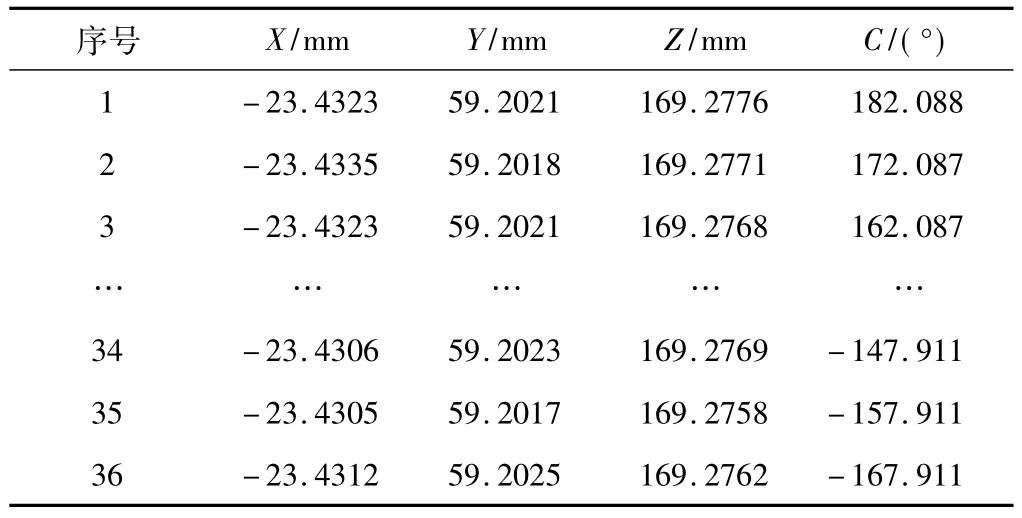
表3 齿轮测量数据
其中,X、Y、Z和C分别代表齿轮测量中心的三个坐标读数以及回转轴读数。
根据被测齿轮基本参数计算齿轮分度圆半径并进行齿距偏差评定,对比基于新旧标准的齿距偏差评定结果如表4所示。

表4 齿距偏差评定结果对比 单位:μm
其中依据ISO 1328-1:1995的评定结果由齿轮测量中心给出评定数值,依据ISO 1328-1:2013的评定结果为基于“新标准”的齿距偏差评定数值。
由上述结果可以看出基于ISO 1328-1:2013的齿距偏差评定结果与齿轮测量中心基于其上一版标准ISO 1328-1:1995得到的评定结果基本一致,对于单个齿距偏差,ISO1328-1:2013定义为无符号数值,取任一单个齿距偏差的绝对值的最大值,因此数值为正。
将上述齿轮基本参数和齿距测量数据载入齿距偏差评定软件,得到齿距偏差评定结果界面如图4所示。
4 结束语
依据圆柱齿轮精度国际标准ISO 1328-1:2013中的齿轮齿距偏差的定义及评定方法,给出了齿距偏差评定方法及计算公式,设计了ISO1328-1:2013齿距偏差评定流程,并开发了齿距偏差评定软件。进行了基于标准的两个版本(2013版和1995版)的齿距偏差评定结果的对比。所给出的齿轮齿距偏差评定方法及软件为应用ISO 1328-1:2013进行齿距偏差评定提供了参考。
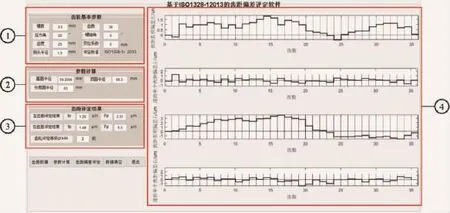
图4 齿距偏差评定结果界面
