基于CTCS-3级列控系统的高速铁路移动闭塞实现
2019-10-11徐效宁吕书丽
徐效宁,李 辉,王 菲,吕书丽
(1.中国铁道科学研究院集团有限公司通信信号研究所,北京 100081; 2.国家铁路智能运输系统工程技术研究中心,北京 100081)
近年来,国民经济的快速发展,对高速铁路的运输能力提出了更高的要求。目前我国高速铁路已成功试验的自动驾驶(ATO)技术被证明是一种有效的途径,它在提供自动化程度的同时,能够在一定程度上提高运输效率[1-3]。ATO控车时以列控系统提供的行车许可终点作为目标点,我国高速铁路装备的CTCS-2/3级列控系统均是采用准移动闭塞方式,它们的行车许可终点为前方占用的闭塞分区入口处。而移动闭塞方式下,行车许可终点可以延伸至前方列车的安全车尾处,因此可以进一步缩短行车间隔,提高线路的运输能力[4,5]。
我国列车运行控制系统(CTCS)的最高应用等级是CTCS-4级,它取消了轨道电路,通过地面和车载设备共同完成列车定位,能够实现移动闭塞。但我国既有高速铁路一直基于轨道电路实现列车占用检查,干线铁路尚未有取消轨道电路的运用经验。
通过分析当前CTCS-4级列控系统取消轨道电路面临的问题,提出了一种基于CTCS-3级列控系统的移动闭塞实现方案,并给出一种移动闭塞方式下行车许可的计算方法,为我国高速铁路移动闭塞的实现提供一定的参考。
1 CTCS-4级列控系统面临的问题
1.1 CTCS-4级列控系统介绍
2004年,为满足铁路运输对列车运行控制系统的需要、提高安全性能、实现互通运营、规范系统设计和适应发展需求,原铁道部编制了《CTCS技术规范总则》,给出了我国列车运行控制系统CTCS的定义、目标和体系框架。CTCS根据系统配置按功能划分为CTCS-0,1,2,3,4共5个等级[6]。
CTCS-4级列控系统基于无线通信传输平台,由无线闭塞中心RBC和车载系统共同完成列车定位和列车完整性检查。RBC依据列车的位置报告和列车完整性确认列车头部和尾部位置,逻辑判断线路上各车的占用状态。由于RBC知道线路上每辆列车的位置,所以为后车分配的行车许可能够延伸至前车的安全车尾处,在保证安全的前提下,提高了运输效率。
1.2 高速铁路中轨道电路的作用
CTCS-2级和CTCS-3级列控系统均由轨道电路实现列车占用检查,CTCS-2级列控系统还通过轨道电路向车载设备传输前方区段空闲信息[7]。
因为CTCS-3级列控系统以CTCS-2级作为后备系统,所以高速铁路不论装备CTCS-2级还是CTCS-3级列控系统,轨道电路都同时具备列车占用检查和传输前方区段空闲信息两项功能。
根据高速铁路设计规范,高速铁路一般不是一条孤立的线路,既要与其他的高速铁路连接,还会与速度较低的既有路网连接[8]。当装备列车运行监控装置(LKJ)的列车进入高铁线路时,一方面列控地面设备通过轨道电路可以确认闭塞分区的占用情况,为其他装备CTCS-2/3级列控车载设备的列车提供行车许可;另一方面,LKJ也可以从轨道电路信息中获取前方区段空闲信息,实现正常模式控车[9]。因此,轨道电路对于保证高速铁路的兼容性起到了关键作用。
1.3 取消轨道电路后的影响分析
如果高速铁路装备CTCS-4级列控系统,取消了轨道电路,根据相关研究和城市轨道交通移动闭塞模式的运用经验[10-14],以下运营场景下将无法满足运输需要。
(1)无线通信中断
如果GSM-R网络故障或其他原因造成无线通信中断,地面设备RBC将无法得知列车的最新位置,无法给后续列车延长行车许可,运输效率将受到严重影响。
(2)跨线列车运行
当装备CTCS-2级车载设备的列车进入高铁线路时,RBC将无法得知列车位置,也无法给装备CTCS-4级车载设备的列车发送行车许可。如果高铁线路允许装备CTCS-2级车载设备的列车进入线路,运输能力将严重下降。装备LKJ的列车进入线路时,线路也会存在相同问题。
(3)RBC故障重启
CTCS-4级列控系统的RBC如果发生故障重启,它无法确认管辖范围内列车的数量,也无法确认是否所有的列车都已重新建立无线通信。如果某一辆列车未能报告位置,RBC误认为该区段没有列车占用,危险性可想而知。因此,这种情况只有制定详细的规章操作,并且恢复过程也需要耽误很长的时间。一旦RBC发生故障重启,线路运输能力几近瘫痪。
2 基于CTCS-3级列控系统的方案
2.1 系统总体结构
根据CTCS-4级列控系统取消轨道电路面临的问题,提出一种现阶段实现移动闭塞的列控系统方案,它基于CTCS-3级列控系统[15],其系统结构如图1所示。
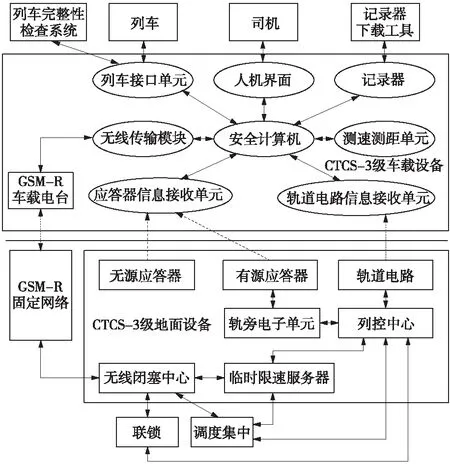
图1 高速铁路移动闭塞的列控系统结构
基于CTCS-3级列控系统的移动闭塞方案架构包括车载设备和地面设备。地面设备包括无线闭塞中心、轨旁电子单元及应答器(有源和无源)、轨道电路、列控中心和临时限速服务器等;车载设备包括安全计算机、测速测距单元、无线传输模块、应答器信息接收单元、轨道电路信息接收单元、列车接口单元、人机界面和记录器等。
与既有CTCS-3级列控系统相比,车载设备增加了与列车完整性检查系统(TIMS)的接口,系统其他设备硬件结构与既有CTCS-3级列控系统保持一致[16-17],这有利于在既有高铁线路上升级改造。对于地面子系统而言,只需升级相关设备软件,各设备的硬件接口都可以维持不变。
2.2 基本工作原理
基于CTCS-3级列控系统的移动闭塞方案中,RBC需要综合考虑闭塞分区的占用状态和列车的位置报告信息。当某一列车通信中断或列车完整性丢失时,RBC应采用闭塞分区的占用状态来弥补这些故障列车的位置信息,以保证为其他正常通信列车提供移动闭塞的行车许可。
同时,由于CTCS-3级列控系统以CTCS-2级列控系统作为后备。这样,当通信中断和装备CTCS-2级或LKJ的跨线列车进入高铁线路时,列控中心可以通过轨道电路为这些列车提供行车许可,保证线路的运输效率。
3 移动闭塞的行车许可计算
3.1 基本思路
行车许可(MA)是行车的安全凭证,其终点是列车被授权运行到的位置。移动闭塞方式下,行车许可终点可以延伸到前车的安全尾部。但考虑到无线通信中断和跨线运行等情况,高铁线路上会出现以不同运行等级的列车在同一区间混跑的情况,行车许可的计算变得复杂。
基于CTCS-3级列控系统的架构特点,提出一种移动闭塞下行车许可的计算方法,该方法利用CTCS-3级列控系统的既有逻辑,可以降低复杂度。下面将以区间运行为例进行说明,如图2所示,计算方法具体分为两步:
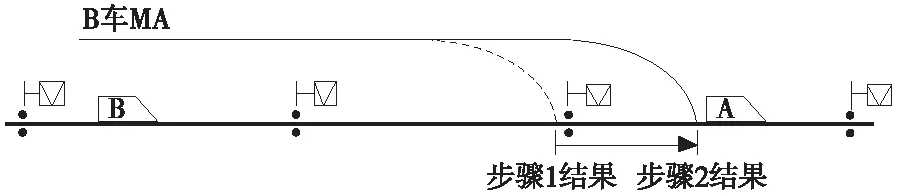
图2 行车许可计算原理示意
步骤1 RBC参照CTCS-3级列控系统既有逻辑,根据闭塞分区的占用状态计算行车许可,行车许可的终点为前方占用闭塞分区的入口处[18];
步骤2 RBC判断前方占用闭塞分区是否均是正常通信列车(位置报告有效且列车完整性确认),如果是,则将行车许可终点延伸至对应前方列车的安全车尾处。
按照这样的思路,系统只需在既有CTCS-3级处理逻辑的基础上,增加上述步骤2的计算。当不满足条件或无法判断时,系统会给出与既有CTCS-3级列控系统相同的MA,保证安全和基本的运输效率。
3.2 建模实现
既有CTCS-3级列控系统的行车许可以闭塞分区或进路为基本单元,对于区间而言,每个闭塞分区有两种工作状态:“锁闭”和“使用”。当闭塞分区空闲时,该闭塞分区自动转为“锁闭”状态;当列车占用轨道区段时,其所处闭塞分区将呈“使用”状态。既有CTCS-3级列控系统的行车许可在“使用”状态的闭塞分区入口处终止[19]。
为了便于移动闭塞模式下MA的计算,本文将CTCS-3级列控系统的原“使用”状态再分出一个逻辑状态“占用锁闭”,即该分区虽被占用,但仍允许后续列车进入。当闭塞分区内所有列车均与RBC正常通信、列车位置报告有效且列车完整性已确认时,工作状态即为“占用锁闭”,否则该占用分区的工作状态为“使用”。
3.1节步骤1计算行车许可的原则与既有CTCS-3级列控系统相同,只有“锁闭”的闭塞分区才能分配且仅能分配给一个注册的车载设备[20]。需要注意的是,对于以完全监控(FS)模式运行的车载设备,当原行车许可终点不对应闭塞分区入口时,不能直接分配新的行车许可。图3给出了一种场景,列车A和列车B均为通信列车,闭塞分区3被其他列车占用,B车MA终点为A车安全车尾。若A车通信中断,当闭塞分区3变为空闲时,因为B车MA终点至闭塞分区2末端之间的线路情况未知,RBC不应给B车延长MA。而既有CTCS-3级列控系统行车许可终点总在闭塞分区的边界,对于以FS模式运行的列车不存在这种场景。所以,步骤1计算MA时,若原逻辑未考虑这种情况,则移动闭塞模式时需增加相应的处理。这种情况下,B车在MA耗尽时转目视模式行车,RBC应在确认前方轨道空闲(TAF)后再发送新的MA。

图3 MA终点不对应闭塞分区入口的场景
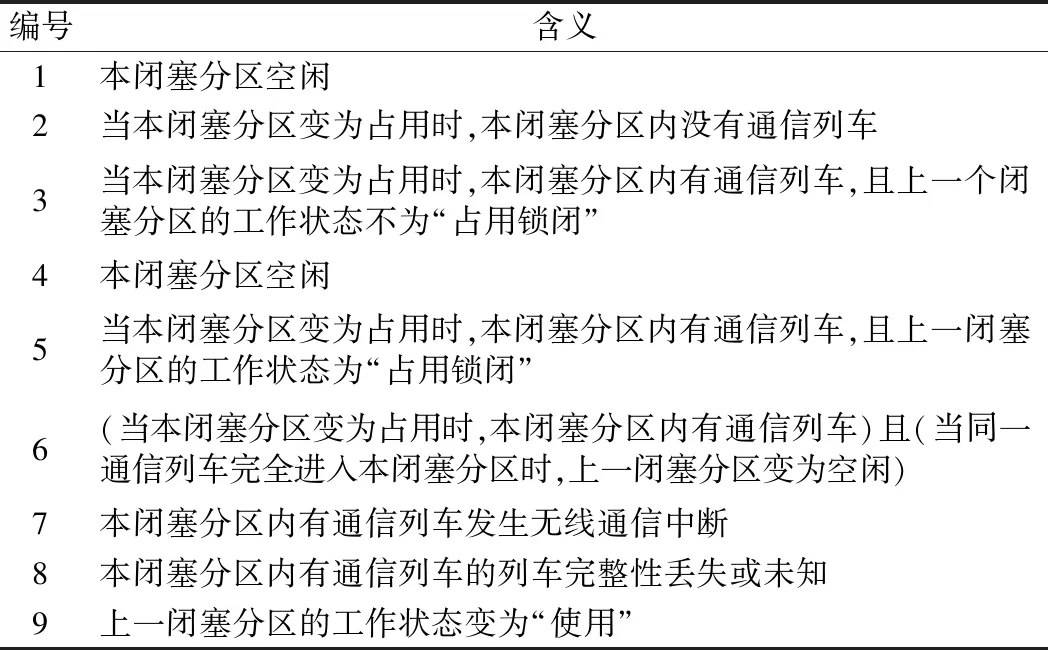
步骤2计算行车许可,当判断闭塞分区的工作状态为“占用锁闭”时,则将MA终点延伸至对应前方列车的安全车尾处。通过这样的处理,问题集中在判断闭塞分区的工作状态上,本文将以有限状态机(Finite States Model,简称FSM)对此进行建模。图4给出了移动闭塞方式下闭塞分区工作状态转换的FSM模型,图中转换条件的“,”表示满足其一即可进入。表1为对应条件的含义,系统判断列车与闭塞分区的位置关系时,应在保证安全的前提下考虑设备的反应时间和传输延时。

图4 闭塞分区工作状态转换的FSM模型
编号含义1本闭塞分区空闲2当本闭塞分区变为占用时,本闭塞分区内没有通信列车3当本闭塞分区变为占用时,本闭塞分区内有通信列车,且上一个闭塞分区的工作状态不为“占用锁闭”4本闭塞分区空闲5当本闭塞分区变为占用时,本闭塞分区内有通信列车,且上一闭塞分区的工作状态为“占用锁闭”6(当本闭塞分区变为占用时,本闭塞分区内有通信列车)且(当同一通信列车完全进入本闭塞分区时,上一闭塞分区变为空闲)7本闭塞分区内有通信列车发生无线通信中断8本闭塞分区内有通信列车的列车完整性丢失或未知9上一闭塞分区的工作状态变为“使用”
注:闭塞分区的空闲/占用由联锁设备发送给RBC。
由于非通信列车不向RBC报告列车位置,RBC应避免将存在非通信列车的闭塞分区错误的转入“占用锁闭”工作状态。“占用锁闭”工作状态转换的判断逻辑如下。
(1)在闭塞分区由空闲变为占用的时刻,如果根据列车位置报告有列车的最小安全车头进入该分区的入口,说明该分区是由本车占用的,该分区本车前方没有其他非通信列车;在该列车完全进入本闭塞分区的时刻,如果上一分区由占用变为空闲,说明上一分区没有非通信列车,本分区通信列车的后方不存在非通信列车进入的可能,此时本分区转入“占用锁闭”工作状态(条件6)。
(2)当上一分区的工作状态为“占用锁闭”时,也可以说明上一分区没有非通信列车,结合本分区列车前方没有非通信列车的判断,本分区也可转入“占用锁闭”工作状态(条件5)。
(3)对于处于“占用锁闭”的闭塞分区,如果列车发生无线通信中断、列车完整性丢失或未知时,本分区转入“使用”工作状态(条件7和条件8)。
(4)对于处于“占用锁闭”的闭塞分区,如果上一闭塞分区处于“使用”工作状态,说明上一分区可能存在非通信列车,本分区可能无法判断该车的位置,这种情况下本分区退出“占用锁闭”,转入“使用”工作状态(条件9)。例如,上一分区存在多辆非通信列车,即使一辆列车完全驶入本分区时,上一分区仍在占用,本分区无法得知已有非通信列车进入,系统通过本条件对这种情况进行防护。
(5)当本闭塞分区空闲时,工作状态转入“锁闭”(条件4)。
3.3 运营场景验证
本节通过特殊运用场景的分析,对3.2节闭塞分区工作状态转换的FSM模型进行验证。
(1)区间建立无线通信
如图5所示,列车A位于闭塞分区1,该车在位置1处与RBC建立无线通信,报告有效的列车位置且列车完整性已确认。

图5 区间建立无线通信
位置1:A车进入闭塞分区1前未建立无线通信,闭塞分区1工作状态为“使用”(条件2);后车MA终点可以延伸到闭塞分区1的入口处。
位置2:A车进入闭塞分区2,闭塞分区2工作状态转为“使用”(条件3)。
位置3:A车出清闭塞分区1,闭塞分区1空闲,其工作状态转为“锁闭”(条件1),闭塞分区2工作状态转为“占用锁闭”(条件6);后车MA终点可以延伸到闭塞分区2内A车的安全车尾处。
位置4:A车进入闭塞分区3,闭塞分区3工作状态转为“占用锁闭”(条件5)。
位置5:A车出清闭塞分区2,闭塞分区2空闲,其工作状态转为“锁闭”(条件4);后车MA终点可以延伸到闭塞分区3内A车的安全车尾处。
假如后续列车在进入闭塞分区1前已建立无线通信,在追踪A车的过程中,闭塞分区2的工作状态依次为“占用锁闭”、“锁闭”,所以闭塞分区3保持在“占用锁闭”状态,后车按照MA可以进入闭塞分区3。
(2)对非通信列车的防护
如图6所示,列车A和列车B均位于闭塞分区1,B车为非通信列车,A车在位置1处与RBC建立无线通信,报告有效的列车位置且列车完整性已确认。

图6 对非通信列车的防护
位置1:A车进入闭塞分区1前未建立无线通信,闭塞分区1工作状态为“使用”(条件2)。
位置2:A车进入闭塞分区2,闭塞分区2工作状态转为“使用”(条件3)。
位置3:A车出清闭塞分区1,由于B车的存在,闭塞分区1仍占用。
位置4:A车进入闭塞分区3,闭塞分区3工作状态转为“使用”(条件3)。
位置5:A车出清闭塞分区2,闭塞分区2空闲,其工作状态转为“锁闭”(条件1),闭塞分区3工作状态转为“占用锁闭”(条件6)。
假如这时B车进入闭塞分区2,闭塞分区2工作状态转为“使用”(条件2),闭塞分区3工作状态转为“使用”(条件9);当B车出清闭塞分区2时,闭塞分区2工作状态转为“锁闭”(条件1)。由于此时闭塞分区3工作状态为“使用”,后车MA终点为闭塞分区3的入口处,而不是越过B车延伸到A车的安全车尾处。
(3)无线通信中断或列车完整性丢失
当列车完整性丢失或未知时,本方案RBC会与车载设备中断无线通信,这样后续处理与无线通信中断场景一致。
如图7所示,列车A和列车B均为正常通信列车,此时闭塞分区1、闭塞分区2和闭塞分区3的工作状态依次为“占用锁闭”、“占用锁闭”和“锁闭”,B车的MA终点为A车安全车尾处。

图7 无线通信中断
若A车在闭塞分区2时无线通信中断,闭塞分区2工作状态转入“使用”。为了避免B车输出制动,根据CBTC的运用经验,这种情况下已经延伸到闭塞分区内的B车MA不回撤。在B车进入闭塞分区2前,可能出现两种情况。
情况1:A车已出清闭塞分区2。闭塞分区2空闲,当B车进入闭塞分区2后,闭塞分区2转入“占用锁闭”(条件5),后续列车的MA可延伸到B车的安全车尾处。由于A车无线通信中断,其占用的闭塞分区工作状态为“使用”,所以B车的MA终点为A车所在闭塞分区的入口处。
情况2:A车未出清闭塞分区2。当B车进入闭塞分区2后,此时即使A车出清闭塞分区2,由于B车MA终点至闭塞分区2的“盲区”,RBC不会向B车发送新的MA。B车以目视模式行车,当通过TAF确认后,RBC向车载设备发送MA,MA终点为无线通信中断A车占用的闭塞分区入口处。
4 结语
本文分析了现阶段高速铁路CTCS-4级列控系统应用面临的问题,提出一种基于CTCS-3级列控系统的高速铁路移动闭塞方案。高速铁路是一个复杂的系统,行车许可计算直接关系到行车安全,本文的行车许可计算方法基于安全运用多年的CTCS-3级列控系统,变更内容和系统风险更加可控,并通过运营场景对算法进行了验证。本方案地面子系统结构和硬件接口与CTCS-3级列控系统完全相同,实际改造的工程量较小,有利于在线路上验证实施。既有CTCS-2/3级列控系统,基本逻辑都是一个闭塞分区只允许一辆列车进入,而移动闭塞打破了这种概念,这在高铁线路未有先例,所以本文的研究探索在工程应用之前,细节还需要进一步的论证。
