智能脚踏控制式电动滑板设计
2019-09-27李顺霖张盛阳谢印忠
李顺霖 张盛阳 谢印忠
(临沂大学自动化与电气工程学院 临沂 276000)
引言
随着电子技术和控制技术的发展,各种轻巧便捷的电动代步、运动工具出现在人们的生活中,电动滑板车就是其中之一[1-2],传统无动力滑板车驱动和控制必须靠一只脚不停蹬地或与地面摩擦,当今市面上的电动滑板车控制简单,启动多数需要电源开关,并且启动以后立即以很大扭矩加速前进,安全性较差,为稳定驾驶,多采用带立杆的把手来控制,并且可能会爬坡或驾驶习惯等令电机处于过载或堵转状态[3],通过自动控制理论的学习和对电动滑板车控制系统的研究,设计出以嵌入式单片机SMT32为控制中心,利用压力膜传感器测量驾驶者控制状态,设置自动速度测量控制系统,完成了仅仅利用脚踏式便可以方便、可靠的控制。
1 控制系统设计方案
电动滑板控制系统主要包括主控中心(微处理器STM32F103[4])、电机驱动电路、压力检测模块、系统电源电路与电池稳压等部分,其总体框图如图1所示。
1.1 电机驱动电路
在电动滑板车的驱动电路中,最主要的是对电机的控制,即加减速和刹车的控制。考虑到滑板调速和承载的体重,选用了两个功率为80 W的直流无刷电机,采用双电机驱动。驱动电路为高压高速JYQD_V7.3E2直流电机驱动器,直接由电池组提供驱动电流,控制信号通过STM32F103单片机输出PWM波控制。电机驱动电路如图2所示,PWM波20 K可调,设置调节步幅,即每次加速,电机驱动信号口PWM值上调100,同样每次减速,PWM下调100。紧急停止时,PWM直接清零。通过这种方法调节电机的转速,实现对电动滑板的速度控制和制动。
1.2 主控电路
控制中心采用嵌入式单片机STM32F103作为主控芯片,具有运算速度快、体积小、功耗低、丰富外围接口资源等优点:高性能32位的RISC ARM Cortex-M3内核,包含1个PWM 定时器、3个通用16位定时器、2个12位的ADC、3个USART 等资源,且所有I/O口可以映像到16个外部中断,法意半导体公司提供了功能强大的库函数,使STM32的编程变得简单易学,容易上手。
电动滑板的运动方式主要通过采集三个电阻式薄膜压力传感器的压力值控制[5],电阻式薄膜压力传感器固定位置如图2所示,其中传感器A用来感测是否有人站立在滑板上,有驾驶者时启动滑板车,否则不启动,并且电机处于刹车状态;传感器B通过采集驾驶者前脚动作进行加速控制,每点踏一次对应一次加速;传感器C感应后脚动作进行减速控制,每点踏一次对应一次减速,后脚离板,运行刹车操作。
薄膜压力传感器信息通过三路模拟信号转换电路(如图3所示)将压力转换成电压信号,图中N1为电阻式薄膜压力传感器,out引线传入STM32单片机IO口(PA1、PA2、PB1)经过A/D数字化转换送入控制中心单片机分析。控制中心对三个IO口一直处于检测状态,对变化的AD值实时做出相应的控制调整。
为行驶安全,实时控制滑板速度,采用霍尔传感器测速方案测量滑板前进速度[6],如图4所示为测量电路,霍尔传感器为图中3144,运放仍然采用LM393。当滑板车速度达到15 km/h时,自动减速,甚至刹车。
控制器的主要控制方式压力检测就是将三路模拟信号传入STM32单片机串口(PA1、PA2、PB1)经过A/D转换计算电压值。然后单片机三个串口一直处于检测状态如果发现有某一串口AD值发生变化,则做出相应的调整改变控制电机运转。
1.3 电源电路
该控制器中采用20节磷酸铁锂电池,电压约为36 V(VCC)。驱动电路部分供电电源是+ 24 V,主控电路的电源是+5 V。 系统电源VCC经稳压电路调整后输出得到+24 V电压供给电机驱动电路使用;+ 24 V电源又输入另一个稳压模块得到+5 V电压供给控制中心STM32F103及各测量电路使用。

图1 控制系统总体设计框图
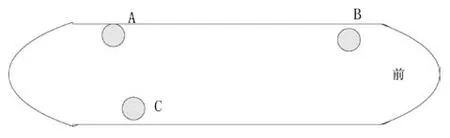
图2 薄膜压力传感器在滑板位置

图3 薄膜压力传感器电压转换电路

图4 霍尔传感器测速电路
2 程序设计
Keil uVision4集成开发环境,其为ARM处理器提供了一个完整的开发环境,软件设计中使用了MDK-ARM系列库函数,提高软件的可靠性和实时性,降低软件设计的复杂性。
系统的程序流程图如图5所示,开机以后系统首先进入初始化,完成控制中心嵌入式单片机STM32F103时钟、IO口初始化,对三组压力传感器、PWM发生器初值,三组压力传感器、测速模块初始化等。初始化完成后开中断A后进入等待。
当有人脚踏在压力传感器A处,将产生一个中断,开启电机,同时开启三个压力传感器中断、超速中断等,并且速度实时测量。无中断发生时运行默认程序:电动滑板以10 km/h左右速率前进。驾驶者前脚点击压力传感器B一次将加速一次:控制中心单片机输出PWM波占空比上调100(即驱动平均电压上调总电压的0.5 %),直至占空比达100 %(全压运行);后脚点击压力传感器C一次控制中心PWM波占空比下调100(即驱动平均电压下调总电压0.5 %),直至占空比为零,停止驱动;后脚跟抬起时压力传感器A发出中断,将运行刹车行动。
3 测试与效果
设计的控制器已经在电动滑板样车上试验(如图6所示),滑板养车的轮毂电机直径为80 mm,实验者以载重60 kg为例,在平坦水泥路开启电压,站立到滑板车上计时,6 s左右加速到3 m/s(10 km/h左右),之后平稳行进;由静止开始迅速经4次点击B压力传感器,5 s可加速到4 m/s(14.4 km/h),之后因为设置速度限制,可以以4 m/s左右速率平稳行进;行驶过程中,后脚离开踏板,滑板开始减速,借助脚地摩擦可以迅速停止(滑行1m内),说明在这个行驶速率内安全可靠。

图5 系统程序流程图

图6 控制电路结构
在学校环形路上经过了一段时间的现场测试运行,行了爬坡和下坡路试验,效果良好,可轻松完成5 km的环形路测试。
4 总结
通过对电动滑板车的电气控制系统的研究,以嵌入式STM32F103单片机为控制中心,压力传感器参数作为运动控制信息的电动滑板车经过测试,运行启动方便、过程稳定,安全性能表现良好,达到设计目标,有很好的应用和推广价值。
