系泊和压载方式对半潜式渔场平台动力特性的影响
2019-09-24黄小华王芳芳刘海阳王占行王绍敏赵云鹏
黄小华,王芳芳,,刘海阳,胡 昱,王占行,王绍敏,赵云鹏
系泊和压载方式对半潜式渔场平台动力特性的影响
黄小华1,王芳芳1,2,刘海阳1,胡 昱1,王占行3,王绍敏1,赵云鹏2
(1. 中国水产科学研究院南海水产研究所,广东省网箱工程技术研究中心,农业部外海渔业开发重点实验室,广州 510300;2. 大连理工大学海岸和近海工程国家重点实验室,大连 116024;3. 中国水产科学研究院渔业工程研究所,北京 100141)
为了解渔场平台的耐波性及稳性,为渔场平台主体结构设计和海上安装提供理论依据和数据支撑,该研究针对一种半潜式桁架结构渔场平台开展了模型比尺为1:30的波浪水池试验,通过试验分别研究了渔场平台在3种系泊方式(锚链长度2.67、5.34、5.34 m并悬挂200 g重块)、3种压载状态(空载、半载和满载)和6种波况(波高为16.7~23.3 cm,周期为1.64 s和2.01 s)条件下的动力响应情况,比较分析了不同条件下渔场平台系泊力、升沉、纵摇和横摇的试验结果。结果表明,选用5.34 m长度锚链并悬挂200 g重块的单点系泊系统,能够更好的降低渔场平台的系泊力。在所有波况条件下,渔场平台的各运动分量的峰值均比较小,最大升沉峰值为4.21 cm,仅占波高的约1/5,纵摇峰值仅为6.55°,横摇峰值仅为1.19°,表明渔场平台具有较好的稳性。比较3种不同压载状态,其中满载状态下渔场平台的系泊力、纵摇及横摇峰值最大,但在空载状态下渔场平台的升沉峰值最大。随着波高的增大,渔场平台的运动受力均有所增大。研究结果有助于为今后我国半潜式渔场平台发展提供一定的理论参考。
水产养殖;波浪;动力学;渔场平台;单点系泊;压载状态
0 引 言
中国远离大陆的深远海水域水质优良、无污染、水体交换速度快、养殖病害发生率低,是发展现代水产养殖业和海洋渔业经济的新空间[1-2]。近年来,中国滩涂及近海养殖业面临空间压缩、环境破坏的严峻挑战,而外海20 m以深海域的资源利用率不到1%,充分利用深远海广阔的海域资源发展设施工程化养殖,提供大量优质安全的海产品,是加快转变渔业生产方式、建立现代海洋养殖新模式、有效保障粮食安全的重要举措,也是推进实施国家海洋战略的重要组成部分[3]。
国内外深远海养殖起源于网箱养殖,当前主流养殖设施为大型高密度聚乙烯(high density polyethylene,HDPE)深水网箱。为了掌握深水网箱在大浪强流冲击下的安全可靠性,国内外已有众多学者通过计算机数值模拟[4-10]、小比例尺模型试验[11-15]和海上实测[16-18]方法开展了深水网箱水动力特性研究,研究内容除涉及到网箱各主要部件如框架系统、网衣系统及系泊系统的动力学特性之外,也涉及到网箱材料性能[19]、疲劳破坏评估[20]等,至今已较全面的建立了深水网箱工程技术理论,为中国深水网箱产业的快速发展发挥了工程技术理论指导作用。截止到2017年底,中国深水网箱数量规模约1.2万个,养殖产量13.5万t[21],其中HDPE网箱约占90%。由于大型HDPE网箱柔性易变形的特点,其规模化养殖过程管理的高效性必须依赖于专有的养殖管理平台或专业化养殖工作船,配备先进的机械化、自动化装备[22-23]。但由于养殖元素及个体的分散,管理的海域面积比较大,该养殖模式如进一步拓展应用至更深更远的无屏障外海海域,其面临的台风灾害风险必然会更大, 同时造成深远海养殖涉及到的运输补给、管理、配套的问题越来越突出。因此,为充分利用更广阔的外海海域资源,解决深远海设施结构安全和养殖一体化管理的技术瓶颈问题,近两年国内外开始研发集养殖生物、养殖设施、养殖装备等各元素于一体具备现代化养殖方式及管理模式的大型渔场平台[24],包括挪威的“海洋渔场1号”,中国的“深蓝1号”、“德海1号”渔场等[25],有效引领和推动了中国深远海养殖产业的发展。“德海1号”为半潜式桁架结构渔场平台,采用单点系泊系统,是一种环境友好节约型养殖装备,可以随着涨落潮的变化在以锚泊点为中心的区域内漂移运动,使得渔场平台养殖鱼类的排泄物及未吃完的饲料能够在更大海域范围内分解,大大减轻了局部海洋环境的恶化,已于2018年9月完成建造并投放至广东珠海万山附近海域进行养殖试验示范。
本研究围绕“德海1号”渔场研发开展前期试验研究,重点围绕渔场平台动力响应特性,通过模型比尺1:30的波浪水池试验,研究探讨了不同波浪条件,系泊方式和压载状态对渔场平台运动受力的影响,旨在了解渔场平台的耐波性及稳性,为渔场平台主体结构设计和海上安装提供理论依据和数据支撑。
1 材料与方法
1.1 试验设备与仪器
研究在中国水产科学研究院江苏如东试验基地波浪试验水池进行。水池长50 m、宽26 m、深1.2 m。水池前端配备造波机,造波机总宽度24 m,单块造波板宽度0.5 m,可产生试验要求的规则波和不规则波。水池侧端设直立式消能网,尾端安装斜坡式消能网,用于吸收波浪能量以减少波浪反射,减弱边界效应。波浪测量采用LYL-Ⅲ型浪高仪,应用计算机进行波高率定、采样及数据处理,仪器线性及稳定性均良好,试验前后均对仪器标定校准,测试相对误差小于0.5%。渔场平台的系泊力测量采用LA1型水下拉力传感器。该测力计为应变式,使用350 Ω应变计组成全桥电路,具有良好的温度特性和灵敏度,可以在水下测量轴向力,测力计量程为200 N,测试相对误差小于1%。渔场平台的运动响应测量采用非接触式运动姿态测量系统(Untouched 6-D Measurement System),该系统是由光学、机械、电子线路等硬件控制系统以及软件图形分析系统组成的一种测试测量设备,可用于对渔场平台6个自由度(纵荡、横荡、升沉、纵摇、横摇、回转)的运动姿态进行测量,测量结果角度分辨率为0.1°、线位移为0.1 mm。以上介绍的3种测量仪器均为中交天津港湾工程设计院有限公司研制。
1.2 试验物理模型
“德海1号”渔场由中国水产科学研究院南海水产研究所和天津德赛环保科技有限公司联合设计研发,采用全锚链单点系泊系统。渔场平台为半潜式桁架结构,可根据养殖过程的操作需求,通过平台前、后端浮体压载水来实现平台的整体上浮和下潜,前后浮体通过钢管桁架连接成整体(见图1)。原型渔场平台总长度91.3 m、宽27.6 m、高10.3 m,设计吃水6.5 m,空载吃水2.4 m,空载质量414 t。

图1 “德海1号”渔场平台
根据试验水池的实际尺寸,采用重力相似准则,确定模型试验的模型比尺为1:30,则动力相似比尺为1:27 000。试验水深设定为0.67 m,模型主要尺寸及相关参数见表1。由于原型网衣的网线直径和网目尺寸较小,若严格遵循几何相似,在模型比尺为1:30的情况下,制作同步缩放的试验网衣往往难以实现。为此采用变尺度的网衣模型设计原则,对于网衣三维空间长度选取大比尺为1/30,对于网目及目脚直径选取小比尺为1,关于网衣相似准则具体介绍可参考文献[11],试验网衣材质与原型相同均为PE,网衣底部与桁架底端连接固定。图2为渔场平台的模型布置图,为了最大减少水池的边界效应,将模型设置于水池的正中央。测力计设于锚链末端,用于测量试验平台的系泊力,锚链上系有浮筒和重块,重块质量为200 g(原型5 400 kg)。波浪传播方向沿轴正方向。

表1 渔场平台主要参数

图2 渔场平台模型布置图
1.3 波浪要素和数据采集
设定大浪条件测试渔场平台的系泊及运动特性。根据试验设备的性能技术参数和水池条件,选定6组波浪要素见表2。依据几何比尺1:30和运动比尺1:5.48,换算得到试验工况对应值,波浪为规则波。试验时波浪通过LYL-Ⅲ型浪高仪测定,待波浪稳定后开始采集数据,采集时间大于10个波浪周期,采样频率为1 024 Hz,间隔为0.02 s[26],试验数据由电脑软件自动读取。每组工况重复3次,取平均值。

表2 试验波浪参数
1.4 试验方案设计
为了比较不同系泊方式下渔场平台在波浪作用下的锚链受力,便于海上安装固定提供一种安全可靠的系泊形式,本研究设定图3所示的3种不同的单点系泊方案。第一种系泊方式设定模型锚链长度2.67 m(原型80 m);第二种系泊方式设定模型锚链长度5.34 m(原型160 m);第三种系泊方式设定模型锚链长度5.34 m(原型160 m),并在距离锚泊点1/4锚链长度位置处悬挂一个质量为200 g的重块。在3种系泊方式中,锚链均系有浮桶,浮桶设定在距离渔场平台前端1/8锚链长度的位置处,吃水深度均为0.22 m。设计在锚链上悬挂浮桶和重块,其依据主要是基于将锚链划分为三段形成折线型系泊系统,通过试验分析折线型系泊系统是否可以更好的为渔场平台在高海况条件下起到缓冲作用从而减小锚链受力[27]。
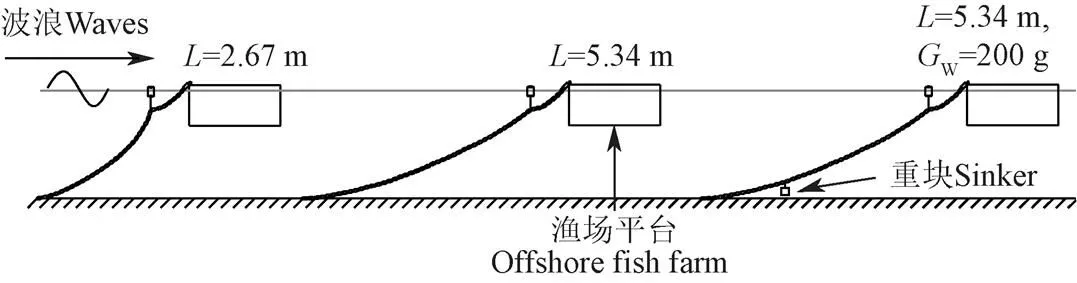
注:L代表锚链长度,Gw代表锚链上悬挂的重块质量,下同。
通过试验结果比较确定锚链受力最小的系泊方式。然后基于此系泊方式,分析压载状态对渔场平台运动受力的影响。该渔场平台根据实际生产需求设计,可以通过调节吃水深度来实现渔场平台的上浮和下沉,便于更好的日常养殖管理。为了解不同工作状态下渔场平台的动力响应特性,共设定渔场平台3种不同压载状态,分别为空载(吃水深度2.4 m)、半载(吃水深度4.0 m)和满载(吃水深度6.5 m)。
2 结果与分析
该研究针对的半潜式渔场平台由于采用的是单点系泊系统,平台在实际情况下必然会随着涨落潮的变化在以锚泊点为中心的区域内漂移运动,产生的纵荡、横荡及回转与渔场平台的稳性关联度不高,为此这3个运动分量在本文中不做专门研究,仅重点针对渔场平台的系泊力、纵摇、横摇及升沉开展试验研究。
2.1 渔场平台系泊方式比较
图4为3种不同系泊方式的渔场平台在波高16.7 cm、周期1.64 s波浪条件下的锚链受力历时曲线。从图中可以看出,当锚链长度为2.67 m时的系泊力最大,最大峰值247.58 N。当锚链长度增加一倍为5.34 m时,锚链受力显著减小,系泊力最大峰值为161.73 N,减小幅度为34.7%。当在5.34 m长度的锚链上悬挂质量为200 g的重块时,锚链受力会进一步减小,系泊力最大峰值相应减小为132.69 N。

注:波高为16.7 cm,周期为1.64 s,渔场平台为满载状态。
此外,从图4中也可以看出,3种系泊方式下对应系泊力峰值处的波形曲线均比较尖,而且各个峰值数据不相同。这主要是由于渔场平台波浪试验过程中采用的锚链,因其自身刚度大而没有弹性的特点,导致在波浪冲击下会将锚链拉直而使得锚链受力脉冲式的达到峰值,这种脉冲式峰值通常会使得各个峰值的大小不一样。采用的第三种系泊方式通过在锚链上悬挂重块,有效增加了整个系泊系统的弹性,当系泊力达到峰值时会起到一定的缓冲作用,相比第二种系泊方式最大峰值减少29.04 N,最大系泊力降低幅度达18%;相比第一种系泊方式减少114.89 N,最大系泊力降低幅度达46.4%。对应其他波况如波高20.0 m、周期1.64 s或者2.01 s条件时,比较渔场平台在3种系泊方式下的锚链受力,发现均是第三种系泊方式的锚链受力最小,而第一种系泊方式的锚链受力最大,与上述比较结果一致,故不对其他波况再做重复性介绍。
2.2 渔场平台运动响应
高海况下渔场平台的稳定性是平台设计者、养殖者等所关注的焦点,稳定性评估其重要依据来源于平台的运动响应数据。表3为满载状态时渔场平台在6种波况条件下的运动分量试验结果,各运动分量数值取试验结果的平均峰值。从表中可以看出,随着波高的增大,平台的升沉、纵摇及横摇峰值均增大。在相同波高条件下,波浪周期2.01 s时的渔场平台升沉和纵摇峰值要大于周期1.64 s的情况。此外,在所有不同波况条件中,当波高23.3 cm、周期2.01 s(原型波高7 m、周期11 s)时的渔场平台升沉、纵摇及横摇峰值均是最大的,升沉峰值为4.21 cm,仅占波高的约1/5,纵摇峰值仅为6.55°,横摇峰值仅为1.19°,表明渔场平台即使在高海况条件下,各运动分量值均比较小,渔场平台具有较好的稳性。

表3 渔场平台运动响应的试验结果
注:系泊方案采用锚链长度5.34 m并悬挂200 g重块的单点系泊方案(下同)。为波高,为波浪周期。渔场平台为满载状态。
Note: The single-point mooring system with anchor chain length of 5.34 m and a weight of 200 g is used (the same below).is wave height,is wave period. The offshore fish farm is in full-load status.
2.3 压载状态对渔场平台运动受力的影响
图5为各波况条件下3种不同压载状态对渔场平台运动受力的影响比较,其中系泊力峰值比较结果见图5a所示。可以看出,对应不同波况条件空载状态下锚链受力均最小,而满载状态下锚链受力最大。以波高23.3 cm、周期2.01 s为例,满载状态时系泊力峰值为142.10 N,约为半载状态时117.40 N的1.21倍,空载状态时66.82 N的2.13倍。根据这一研究结果,实际中的渔场平台在养殖收获完成后,可以将渔场平台上浮以便减小锚链受力,增加高海况渔场的安全性。
图5b~图5d为不同压载状态下渔场平台各运动分量的比较。从图5b所示的升沉比较结果可以看出,空载时渔场平台的升沉峰值最大,而图5c~图5d所示的纵摇和横摇的比较结果则相反,满载时渔场平台的纵摇和横摇的峰值最大。在相同压载状态下,渔场平台的系泊力、升沉、纵摇及横摇峰值均随着波高的增大而增大。如以半载为例,在波浪周期为1.64 s时,渔场平台的系泊力从波高16.7 cm时的62.99 N增大到波高23.3 cm时的132.95 N,增加幅度为111%;相应的渔场平台升沉、纵摇及横摇峰值的增加幅度分别达到18%、58%和110%。当波浪周期由1.64 s增大至2.01 s时,对应不同压载状态,渔场平台的系泊力峰值均有所减小,纵摇峰值均相应增大。在周期2.01 s时,不同压载状态下渔场平台的升沉峰值相差较小。图5d所示的横摇结果表明,虽然满载状态下渔场平台的横摇峰值最大,但数值很小,这可能与渔场平台采用的单点系泊方式有关,在试验过程中能够明显观察到波浪传播方向基本与渔场平台的纵向始终保持一致,表明单点系泊系统对于降低渔场平台的横摇响应具有一定效果。
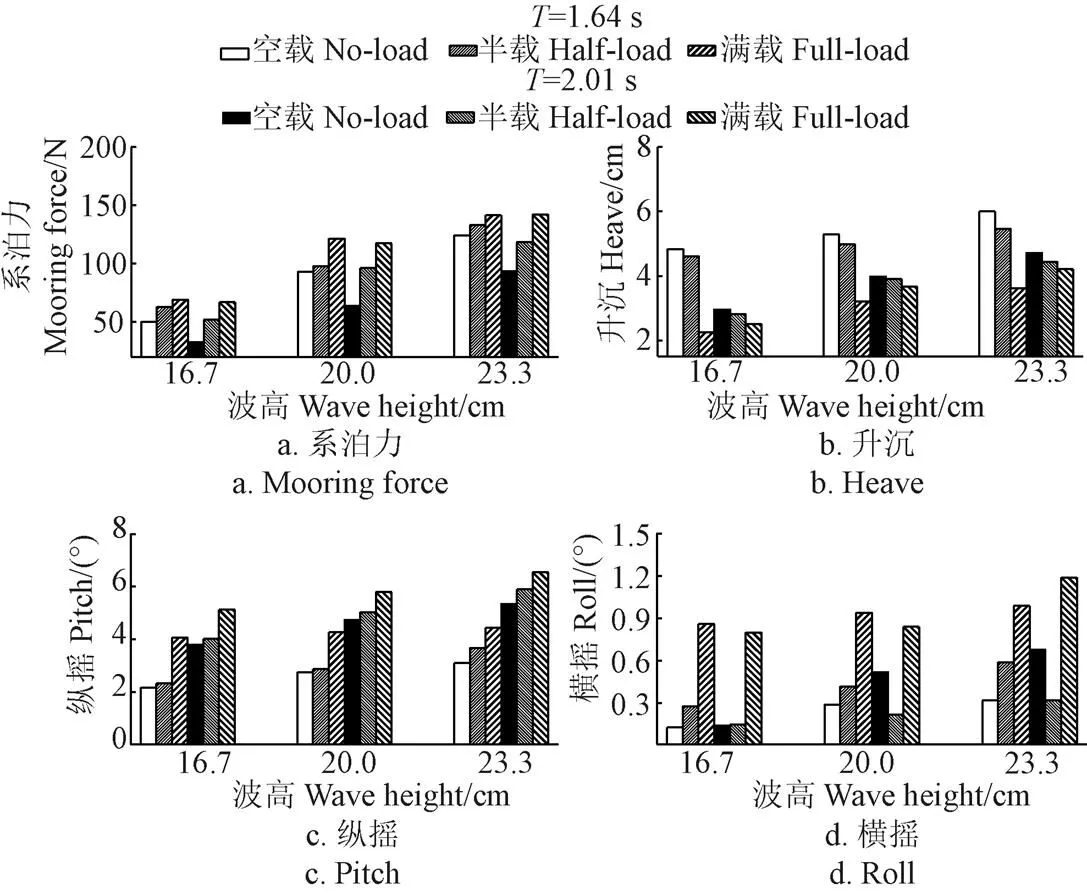
图5 不同压载状态下渔场平台运动受力峰值比较
3 结 论
本文对一种半潜式桁架结构渔场平台在大浪条件下的动力响应特性进行了试验研究,比较分析了渔场平台分别在不同波况(波高16.7~23.3 cm,周期1.64和2.01 s)、系泊方式及压载状态下的运动受力情况,得到如下几点结论:
1)锚链长度由2.67 m增加至5.34 m时,渔场平台的系泊力会显著减小,减小幅度为34.7%。当在锚链上悬挂质量为200 g的重块时,可有效增加系泊系统的弹性,锚链受力会进一步减小,系泊力峰值相比没有悬挂重块时降低幅度18%。
2)在所有波况条件中,波高23.3 cm、周期2.01 s(原型波高7 m、周期11 s)时的渔场平台升沉、纵摇及横摇峰值均是最大的,但升沉峰值仅占波高的约1/5,纵摇峰值为6.55°,横摇峰值仅为1.19°,渔场平台的各运动分量值均比较小,渔场平台具有较好的稳性。
3)对应不同波况条件空载状态下系泊力均最小,而满载状态下系泊力最大。在相同压载状态下,渔场平台的系泊力、升沉、纵摇及横摇峰值均随着波高的增大而增大。渔场平台的纵摇及横摇峰值在满载状态下最大,渔场平台的升沉峰值在空载状态下最大。
[1] 贾敬敦,蒋丹平,杨红生,等. 现代海洋农业科技创新战略研究[M]. 北京:中国农业科学技术出版社,2014.
[2] 徐皓,谌志新,蔡计强,等. 我国深远海养殖工程装备发展研究[J]. 渔业现代化,2016,43(3):1-6.
Xu Hao, Chen Zhixin, Cai Jiqiang, et al. Research on the development of deep sea aquaculture engineering equipment in China[J]. Fishery Modernization, 2016, 43(3): 1-6. (in Chinese with English abstract)
[3] 麦康森,徐皓,薛长湖,等. 开拓我国深远海养殖新空间的战略研究[J]. 中国工程科学,2016,18(3):90-95.
Mai Kangsen, Xu Hao, Xue Changhu, et al. Study on strategies for developing offshore as the new spaces for mariculture in China[J].Engineering Sciences, 2016, 18(3): 90-95. (in Chinese with English abstract)
[4] Fredriksson D W, Swift M R, Irish J D, et al. Fish cage and mooring system dynamics using physical and numerical models with field measurements[J]. Aquacultural Engineering, 2003, 27(2): 117-146.
[5] DeCew J, Fredriksson D W, Bugrov L, et al. A case study of a modified gravity type cage and mooring system using numerical and physical models[J]. IEEE Journal of Oceanic Engineering, 2005, 30(1): 47-58.
[6] Zhao Y P, Li Y C, Dong G H, et al. A numerical study on dynamic properties of the gravity cage in combined wave-current flow[J]. Ocean Engineering, 2007, 34(17): 2350-2363.
[7] Tang H J, Huang C C, Chen W M, et al. Dynamics of dual pontoon floating structure for cage aquaculture in a two-dimensional numerical wave tank[J]. Journal of Fluids and Structures, 2011, 27(7): 918-936.
[8] Lee C W, Lee J, Park B. Dynamic behavior and deformation analysis of the fish cage system using mass-spring model[J]. China Ocean Engineering, 2015, 29(3): 311-324.
[9] Kristiansen T, Faltinsen O M. Experimental and numerical study of an aquaculture net cage with floater in waves and current[J]. Journal of Fluids and Structures, 2015, 54: 1-26.
[10] 黄小华,刘海阳,胡昱,等. 深水养殖网箱浮架变形模拟及结构改进设计[J]. 农业工程学报,2018,34(15):44-49.
Huang Xiaohua, Liu Haiyang, Hu Yu, et al.Deformation simulation and structural improvement design for floating collar of deep-water aquaculture net cage[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(15): 44-49. (in Chinese with English abstract)
[11] 桂福坤. 深水重力式网箱水动力学特征研究[D]. 大连:大连理工大学,2006.
Gui Fukun. Hydrodynamic Behaviors of Deep-water Gravity Cage[D]. Dalian: Dalian University of Technology, 2006. (in Chinese with English abstract)
[12] 郑国富,黄桂芳,魏观渊,等. 波流作用下圆柱形近海抗风浪网箱缆绳的张力特性[J]. 水产学报,2007,31(1):84-89.
Zheng Guofu, Huang Guifang, Wei Guanyuan, et al.Study on the characters of tension in mooring lines of anti-stormy-wave cage with cylindrical net under the combined action of waves and currents[J].Journal of Fisheries of China, 2007, 31(1): 84-89. (in Chinese with English abstract)
[13] 黄六一,梁振林,万荣,等. 波流作用下网格锚泊的单个重力式网箱缆绳张力[J]. 中国水产科学,2011,18(3):636-645.
Huang Liuyi, Liang Zhenlin, Wan Rong, et al.Tension of anchor lines of single gravity grid mooring cage under combining effects of wave and current[J]. Journal of Fishery Sciences of China, 2011, 18(3): 636-645. (in Chinese with English abstract)
[14] Lader P F, Enerhaug B. Experimental investigation of forces and geometry of a net cage in uniform flow[J]. IEEE Journal of Oceanic Engineering, 2005, 30(1): 79-84.
[15] Stranda I M, Sfrensena A J, Volentb Z, et al. Experimental study of current forces and deformations on a half ellipsoidal closed flexible fish cage[J]. Journal of Fluids and Structures, 2016, 65: 108-120.
[16] 郭根喜,黄小华,胡昱,等. 高密度聚乙烯圆形网箱锚绳受力实测研究[J]. 中国水产科学,2010,17(4):847-852.
Guo Genxi, Huang Xiaohua, Hu Yu, et al. In-situ measurement on the forces of mooring lines of circular net cages with high density polyethylene[J].Journal of Fishery Sciences of China, 2010, 17(4): 847-852. (in Chinese with English abstract)
[17] Colbourne D B, Allen J H. Observations on motions and loads in aquaculture cages from full scale and model scale measurements[J]. Aquacultural Engineering, 2001, 24(2): 129-148.
[18] Gansel L C, Oppedal F, Birkevold J, et al. Drag forces and deformation of aquaculture cages: Full-scale towing tests in the field[J]. Aquacultural Engineering, 2018, 81: 46-56.
[19] 刘海阳,王绍敏,黄小华,等. 深水网箱护栏力学性能分析及优化[J]. 农业工程学报,2017,33(4):248-257.
Liu Haiyang, Wang Shaomin, Huang Xiaohua, et al. Mechanical property analysis and optimization of deep-water net cage guardrail[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(4): 248-257. (in Chinese with English abstract)
[20] Bai X D, Xu T J, Zhao Y P, et al. Fatigue assessment for the floating collar of a fish cage using the deterministic method in waves[J]. Aquacultural Engineering, 2016, 74: 131-142.
[21] 农业农村部渔业渔政管理局. 2018中国渔业统计年鉴[M]. 北京:中国农业出版社,2018.
[22] 郭根喜,黄小华,胡昱,等. 深水网箱理论研究与实践[M].北京:海洋出版社,2013.
[23] 王绍敏,刘海阳,郭根喜,等. 基于动特性分析法的海上养殖平台多点系泊系统设计[J]. 农业工程学报,2017,33(5):217-223.
Wang Shaomin, Liu Haiyang,Guo Genxi, et al. Design of multi-point mooring system for marine breeding barge based on dynamic analyses[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(5): 217-223. (in Chinese with English abstract)
[24] 何皛磊,张海文. “深海渔场”的应用前景[J]. 船舶,2018,2:1-6.
He Xiaolei, Zhang Haiwen. Application prospect of “deep-sea fishing ground[J]. Ship Boat, 2018, 2: 1-6. (in Chinese with English abstract)
[25] 何勇. 国内新型深远海渔业养殖装备技术动向[J]. 中国船检,2018(8):102-104.
[26] 波浪模型试验规程:JTJ/T234-2001[S].
[27] 郑艳娜,董国海,桂福坤,等.圆形重力式网箱锚碇系统的受力研究[J]. 应用力学学报,2007,24(2):180-187.
Zheng Yanna, Dong Guohai, Gui Fukun, et al. Wave force on mooring system of gravity cage[J].Chinese Journal of Applied Mechanics, 2007, 24(2): 180-187. (in Chinese with English abstract)
Effects of mooring systems and ballast status on dynamic behaviors of semi-submersible offshore fish farm
Huang Xiaohua1, Wang Fangfang1,2, Liu Haiyang1, Hu Yu1, Wang Zhanhang3, Wang Shaomin1, Zhao Yunpeng2
(1.,,,,510300; 2.,116024,; 3.,100141,)
In recent years, due to various environmental problems and resource conflicts in coastal areas, nearshore mariculture in China has been increasingly confronted with the severe challenge of space compression. However, in more exposed sea areas with the depth exceeds 20 m, the water quality is much better and the water utilization rate is much lower, less than 1%.With the development of aquaculture technology and equipment engineering, it is an inevitable trend for fish farms to transfer to offshore areas. To reduce the risk of fish farming in open sea areas with strong waves and current, offshore fish farm that having the distinct advantages with moderlization of culture and management were encouraged to develop in the past two years in China. Generally, offshore farm was considered as an integrated farming system composed of cultured fish, floating structure, automatic equipments, various facilities, which was expected to play a positive role in leading and promoting the offshore aquaculture industry. In this study, we conducted a series of physical model tests for a semi-submersible offshore fish farm called “Dehai No.1” in waves, in which the model scale was set as 1:30 and the scale of 1:1 was set for the net mesh size. The “Dehai No.1” offshore fish farm with truss structure was co-designed by South China Sea Fisheries Research Institute and Tianjin De-Sai Environmental Protection Technology Co.,Ltd in the year of 2018. The main experimental parameters of the offshore farm were as follows: length 3.04 m, width 0.92 m, height 0.34 m, designed draft of 0.22 m, no-load weight of 15.33 kg. Considering the actual production requirements, three kinds of single point mooring systems (=2.67,=5.34 or=5.34 plusG=200 g) and three kinds of ballast status (no-load, half-load or full-load) as well as different regular waves conditions (=16.7-23.3 cm,=1.64-2.01 s) were set as the test conditions for the fish farm. Through physical model experiments, the dynamic behaviour of the fish farm under different conditions were studied, and the results of mooring force and motion response were given and compared. Owing to the characteristics of the single point mooring system, the fish farm in practice inevitably drift within the scope of sea area in the center of mooring point on seabed with the variation of low-to-high water surface, studying the sway and surge as well as yaw for the fish farm could not testify its good stability. Therefore, we chose the heave, pitch and roll for analyzing the motion characteristics of the fish farm. The experimental results showed that the single-point mooring system with anchor chain length of 5.34 m and a weight of 200 g could better reduce the mooring force of the fish farm in waves. Among all of the wave conditions, the peak value of each movement component of the fish farm was relatively small. When the fish farm was subjected to the sea loads with wave height of 23.3 cm (7 m in full-scale) and wave period of 2.01 s (11 s in full-scale), the peak value for the heave, pitch and roll was 4.21 cm, 6.55° and 1.19°, respectively, which indicated that the fish farm had good performance for the stability of floating state. Comparing the maximum motion and mooring force of the fish farm under various floating conditions, including no-load and half-load as well as full-load, we found that, in the full-load floating state, the peak value for the mooring force, pitch and roll was biggest, but the peak value of the heave was biggest under the no-load floating state for the fish farm. With increasing wave height, both of the mooring force and motion of the fish farm became larger. The results provide a basis for further understanding the dynamic characteristics of fish farm, and help to provide theoretical and data reference for the structure design and installation of fish farm.
aquaculture; wave; kinetics; offshore fish farm; single-point mooring; ballast status
10.11975/j.issn.1002-6819.2019.15.007
S969
A
1002-6819(2019)-15-0048-06
2019-02-18
2019-05-15
国家自然科学基金项目(31772897,31402349);海南省重大科技计划项目(ZDKJ2016011);海洋经济创新发展区域示范专项(Bhsfs012);
广州市珠江科技新星专项(201710010168);广东省现代农业产业技术体系创新团队建设专项资金
黄小华,副研究员,主要研究方向为渔业设施工程技术。Email:huangx-hua@163.com
黄小华,王芳芳,刘海阳,胡 昱,王占行,王绍敏,赵云鹏. 系泊和压载方式对半潜式渔场平台动力特性的影响[J]. 农业工程学报,2019,35(15):48-53. doi:10.11975/j.issn.1002-6819.2019.15.007 http://www.tcsae.org
Huang Xiaohua, Wang Fangfang, Liu Haiyang, Hu Yu, Wang Zhanhang, Wang Shaomin, Zhao Yunpeng. Effects of mooring systems and ballast status on dynamic behaviors of semi-submersible offshore fish farm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(15): 48-53. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.15.007 http://www.tcsae.org