基于RBF神经网络滑模控制的车辆横向控制研究
2019-09-19龚雪娇朱瑞金2
龚雪娇,朱瑞金2,唐 波
(1.河海大学 能源与电气学院,江苏 南京 211100; 2.西藏农牧学院 电气工程学院,西藏 林芝 860000)
近年来,随着全球汽车产业的蓬勃发展,汽车已经成为了当代人出行不可或缺的代步工具。但是随着道路上汽车数量的激增,车祸数量也快速增长,而且很多车祸都是由于司机的操作不当而导致的。所以为了减少人为原因而导致的车祸,世界上的各大汽车厂家及科研机构都在积极地研究驾驶辅助技术,如:道路跟踪系统、车道保持系统、道路偏离预警系统等。以上这些辅助技术都涉及到车辆的横向控制技术,也就是车辆的前轮转向控制技术。车辆横向控制主要是通过安装在车辆上的各种传感器去实时测量获取车辆与当前道路之间的相对位置信息,然后车载计算机根据这些相对位置信息实时计算出前轮控制参数,利用控制参数不断调整车辆前轮的转向使得车辆实时的沿着期望道路轨迹运行。
针对车辆横向控制技术,国内外的学者都进行了大量而深入的研究。Attia等人[1]提出了一个基于非线性模型预测控制的车辆横向控制器,从而实现了车辆的横向控制,但是预测控制实施的周期较长,并且参数整定较为复杂。Huang等人[2]利用车辆横摆角速度作为参考值,以前轮转角和外部横摆力矩作为两个控制变量,设计了基于增益调度H∞的车辆横向控制器,虽然该控制器能够对车辆进行横向控制,但是H∞控制求解过程却十分复杂耗时。Xia等人[3]利用小角度近似,动态模型线性化等措施设计了自抗扰控制器,该控制器能够有效地控制车辆前轮转角,但是该控制器的参数整定比较困难。赵俊波等人[4],提出了一类以角度稳定为内稳定核心回路,以位置误差跟踪为外回路的双回路控制方案,设计了滑模控制器,能够对车辆横向进行有效控制。
为了能够设计出优良的控制器,各国科研工作者一直都在不断研究新的控制算法。由于滑模控制算法具有快速响应、鲁棒性强、无需被控系统精确模型等特点得到了科研工作者的广泛使用。但是滑模变结构控制器所固有的“抖振”现象会对车辆等转向机械结构造成较大的损伤,为了削弱滑模变结构控制器的“抖振”,必须要对滑模变结构做出一定的改进。
经过分析,滑模变结构控制器的“抖振”幅度是由控制器的切换项增益决定的,所以改进方法可以从调节切换项的增益来展开。径向基(Radial Basis Function,RBF)神经网络是一种局部逼近网络,该神经网络可以以任何精度逼近任意连续函数。基于RBF神经网络的特点,本文提出了利用RBF网络对神经网络的切换增益进行调节,从而大大削弱了控制器“抖振”幅度并提高了道路跟踪精度。
1 车辆横向控制数学模型
1.1 车辆二自由度模型
在车辆控制领域,车辆的二自由度数学模型使用的最为广泛,图1所示为车辆二自由度数学模型。二自由度车辆数学模型的建立需要满足一定的条件,第一个条件是车辆的侧向加速度小于0.4g,第二个条件是轮胎侧向力处于线性区间。在满足以上条件后,控制模型忽略车辆转向系统和悬架系统,将车辆前轮转角作为系统的输入。

图1 车辆二自由度模型

(1)
利用式(1)并结合牛顿第二运动定律可以得到车辆具有横向和横摆的二自由度运动数学模型[6]:
(2)
式中,Cf和Cr分别为车辆前后轮的侧偏刚度;m为车辆质量;Iz为整车绕z轴的转动惯量。
1.2 基于视觉预瞄的车辆控制模型
视觉预瞄机制的车辆横向控制模型是参考人类驾驶汽车的人眼预瞄机制,人类驾驶汽车时,总会提前预瞄道路上的一个点,然后用人眼预估出车辆和该点的相对横向距离与航向偏角,从而通过调整车辆前轮的转角来实现目标路径的实时跟踪。智能车利用架设在车辆前方的摄像机充当眼睛,从而不断获取车辆前方的路径图像信息,之后经过一系列的图像处理操作后获取到车辆和道路预瞄点之间的横向偏差和航向偏差。车辆横向控制器通过图像处理获取到的横向偏差和航向偏差参数来实时计算车辆前轮转角参数,从而实现期望路径的实时跟踪。车辆的预瞄运动学示意图如图2所示。

图2 基于视觉预瞄的车辆运动学示意图
分析图2可以得到基于视觉机制的预瞄运动学数学模型:
(3)
式中,yL为横向偏差,即车辆中心线和道路预瞄点处的横向距离;εL为航向偏差,即道路视觉预瞄点处的切线和车辆中心线之间的夹角;DL为预瞄距离;KL为路径曲率。

(4)
式中,
基于预瞄机制的路径跟踪系统存在两个偏差参数,即横向偏差和航向偏差,为了降低控制器设计的复杂度,将这两个误差进行加权比例化融合,将加权后的融合偏差作为滑模切换函数的参数,这样只要控制器使得滑模切换函数趋于零,则基于预瞄机制中的横向偏差和航向偏差都会趋于零,因此车辆随着控制系统施加控制后,车辆会逐渐向预瞄点处进行运动,从而实现基于预瞄机制的期望路径跟踪[7]。将横向偏差和航向偏差进行比例化加权融合后的综合偏差为e,如式(5)所示。
e=k1yL+k2εL,k1>0,k2>0
(5)
2 基于RBF神经网络的滑模控制器设计
滑模变结构控制是一种非线性控制系统,这种控制算法与常规控制算法的最大区别在于控制的不连续性,控制结构是非固定的,控制系统会根据被控系统的状态,不断调整其控制结构,从而使得被控系统的状态沿着预定的轨迹不断地进行滑动模态运动[8-10]。
滑模变结构控制器由等效控制和切换控制两个部分组成,其中等效控制的作用使得系统状态保持在所设计的滑模面上,而切换控制的目的是使得系统在滑模面上做切换滑动[11-12]。滑模变结构之所以会引起被控系统“抖振”,就是切换控制的增益项所引起的,所以为了降低被控系统的抖振幅度就必须对切换控制项的增益进行调节,采用RBF神经网络目的在于对切换控制项的增益进行调节,从而有效地削弱抖振幅度。基于RBF神经网络的滑模控制系统结构图如图3所示。

图3 RBF神经网络的滑模控制系统
2.1 固定增益滑模控制器的设计
针对被控变量e设计滑模面s为

(6)

(7)


(8)
设计切换控制器usw为
(9)
式中,K为切换项的增益。则滑模变结构控制系统的总控制u设计为
u=ueq+usw
(10)
2.2 RBF神经网络的滑模控制器设计

图4 RBF神经网络结构
(11)
式中,Cj为第j个神经元的中心位置;bj为第j个神经元的宽度。RBF神经网络的输出值的绝对值为切换项的增益K为
(12)
式中,wj为隐藏层神经元到输出层神经元之间的权值。神经网络的性能指标J定义为二次型函数:
(13)
利用性能指标就可以对神经网络进行梯度下降调整连接权值,调整权值的目的在于不断使性能指标J沿着负梯度方向变化,同时为了达到快速搜索到全局收敛的目的,网络加入一个惯性项,则为
(14)



由以上这些公式可以推导出输出权值、神经元的中心位置、神经元宽度等参数的迭代算法如下:
wj(t)=wj(t-1)+η(t)[r(t)-y(t)]·
α[wj(t-1)-wj(t-2)]
(15)
α[bj(t-1)-bj(t-2)]
(16)
α[cji(t-1)-cji(t-2)]
(17)
式中,i=1,2;j=1,2,…,6。
本文中为了使得神经网络快速收敛,对η(t)采用自适应学习速率策略,在神经网络训练过程中,根据误差大小来动态调整η(t)。
3 仿真实验验证

表1 车辆参数
(1) 期望路径跟踪分析。
首先在Matlab中的同一个Simulink中仿真了滑模控制器与基于RBF神经网络的滑模控制器对同一段期望路径的跟踪结果,如图5所示。

图5 RBF神经滑模控制与滑模控制器的路径跟踪结果
由图5可知,相较于传统的滑模控制,基于RBF神经网络的滑模控制对期望路径的跟踪更为准确,并且具有更好的稳定特性。
(2) 削弱抖振分析。
为了比较RBF神经网络滑模控制算法与传统的滑模控制算法对车辆抖振消除的效果,传统的滑模控制器和基于RBF神经网络的滑模控制器跟踪同一个期望路径时车辆前轮转角响应如图6所示。
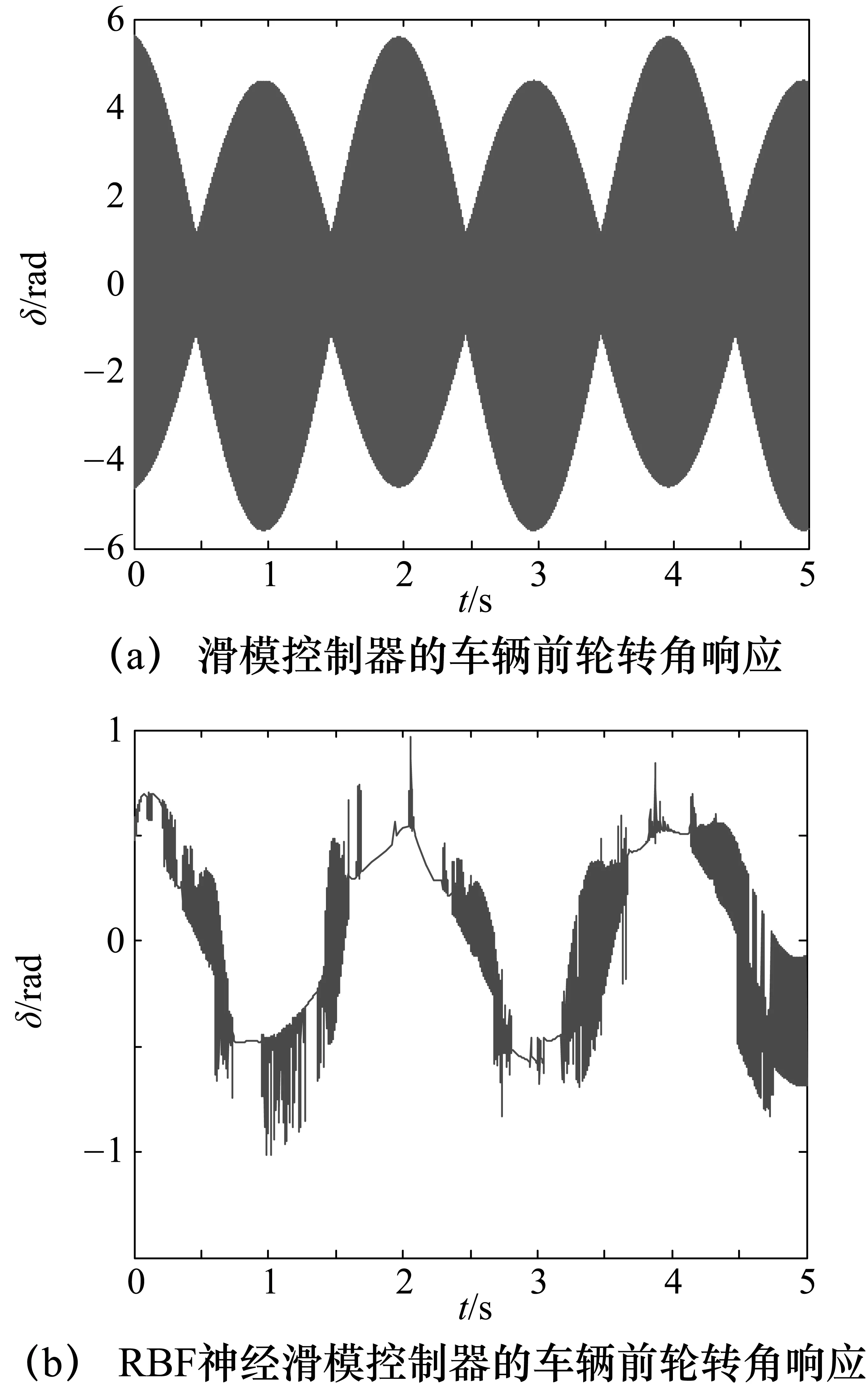
图6 车辆前轮转角响应
表2是在不同时间点对图6中的前轮转角响应的幅度的统计,同时在表2中计算出了本文算法相较于传统滑模控制器的前轮转角幅度的减小率。

表2 前轮转角响应幅度及幅度减小率
由图6、表2可以得出,相较于传统滑模控制算法,RBF神经滑模控制算法可以大幅度地削弱系统抖振,抖振幅度有效地减少了80%~91%。
(3) RBF神经网络输出的滑模控制切换项增益K。
RBF神经网络的输出作为滑模控制切换项的增益K,如图7所示。
由图7可知,随着系统结构状态不断变化,RBF神经网络的输出参数K也在不断进行调整,从而有效地削弱系统抖振。
4 结束语
针对二自由度的车辆横向控制数学模型,本文设计了一种基于RBF神经网络的滑模控制算法,利用RBF神经网络在线实时整定调节滑模控制切换项的增益,从而有效地削弱了系统抖振。实验结果表明:相较于传统的滑模控制器,基于RBF神经网络的滑模控制器跟踪精度更高,系统抖振有效减小80%~91%,能够满足车辆横向控制要求。

图7 RBF神经滑模控制增益K
