基于多层次分割分类模型及其特征空间优化的建筑物提取方法
2019-09-12党涛宋起刘勇徐安建徐波张宏刚
党涛, 宋起, 刘勇, 徐安建, 徐波, 张宏刚
(1.西安测绘总站,西安 710054; 2.兰州大学资源环境学院,兰州 730000)
0 引言
面向对象影像分析(object-based image analysis,OBIA)方法突破了传统分类以像素为基本处理单元的局限性,能够综合利用对象的光谱、纹理、几何和空间结构特征,实现较高层次的遥感影像专题信息分类提取,以其明显的特点和优势,成为建筑物目标提取不可或缺的重要方向和研究热点[1]。目前,国内外已有不少学者利用基于对象的分类方法,从不同角度入手研究提取影像建筑物信息,也针对性地提出了不同检测模型与策略,取得了在限定条件下较好的分类效果[2-10]。
然而,城市环境中地表情况复杂,不同类型地物都有其适宜的空间尺度,利用统一的尺度层次进行影像分割难以获得精确的专题信息提取成果[11]。黄惠萍等[12]针对从单一尺度进行影像特征提取的不合理性,提出了多尺度遥感影像分析方法; 李秦等[13]采用多尺度多层次分类方法对海岸带地区进行土地利用分类,并与单一尺度下的分类结果比较,地物识别精度明显提高。同时,城市地物目标存在严重的光谱变异性,“同物异谱”和“异物同谱”现象较为突出,地物信息提取面临很大挑战和干扰[14]。对于建筑物而言,屋顶的材质和颜色不同,光谱响应也会有所区别,在遥感影像上表现出较大的光谱差异,而且某些建筑物与道路、裸地等不透水面在光谱、纹理、形状等特征上具有一定的相似性[15],会对分类结果产生不同程度的影响。为避免建筑物光谱不同带来的提取误差,吴炜等[16]采用剔除非建筑物的策略提取建筑物; 谭衢霖[17]利用空间特征构建了规则集来识别提取建筑物。另外,影像分类需要综合利用地物的多种特征信息,数量往往较多,其中可能存在不相关或冗余信息,不进行合理的特征选择优化,容易造成“维数灾难”,出现分类精度不增反降的现象[18]。刘舒等[19]采用Relief F和多目标遗传随机森林(random forest,RF)组合的特征选择算法,来削弱高维特征集对面向对象湿地分类精度的影响; 薛章鹰等[20]提出了结合Relief F、遗传算法和支持向量机的建筑物目标识别特征选择算法。
鉴于上述情况,本文以OBIA为基础,采用层次化分割分类处理的方式,顾及地物光谱多样性,结合影像特征选择方法,通过集成数据挖掘技术与机器学习分类算法,以期实现对高空间分辨率遥感影像城市建筑物信息的有效提取。
1 研究方法
1.1 多层次分割分类模型
城市遥感影像中的地物类型主要有建筑物、道路、裸地、植被、水体和阴影等,同一类型地物因属性构成或表面状况不同,在影像中也会呈现出较大差异,如不同颜色屋顶的建筑物和不同铺面材质的道路。由于地表景观本身具有多尺度的层次组织结构[14],采用分层分类的遥感地学分析方法进行地物信息提取,构建合适的类别层次结构是OBIA的基础和关键。因此,本文从建筑物的不透水物理属性出发,按照分层分类处理的思路,基于“不同地物采用不同尺度进行分割,不同影像对象层中根据相应地物类别选择不同特征信息和分类方法”的原则,建立了多层次结构以进行目标地物的分类提取(表1)。
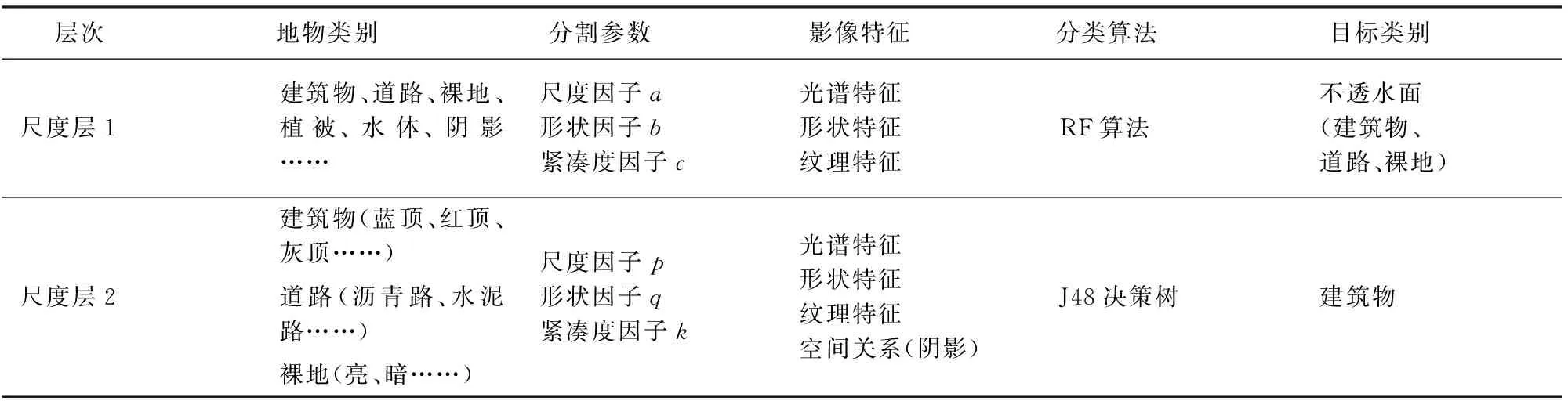
表1 多层次影像分割分类结构Tab.1 Hierarchical image segmentation classification structure
本文提出的多层次分割分类体系包括不透水面提取和建筑物提取2个阶段。首先将光谱上难以区分的建筑物、道路和裸地合并为不透水面,在尺度层1上基于不透水面最优尺度参数进行影像分割,提取对象光谱、纹理和几何形状等信息,采用RF算法获取不透水面分布,剔除水体、植被、阴影等背景地物; 然后以不透水面提取结果为基础特征影像,在尺度层2上基于建筑物最优尺度参数进行影像分割,为更好地解决不透水面组成地物光谱相似问题,根据光谱多样性特征,将建筑物、道路和裸地进一步分成若干子类,在多元化地利用对象光谱、形状及纹理特征的前提下,综合建筑物与阴影对象的邻近关系特征,采用J48决策树算法建立多层次分类规则提取特定地物,获得建筑物最终提取结果。
1.2 特征选择算法
特征信息是地物识别提取的基础,采用有效的特征属性及合适的特征空间维度是影像分类成功的关键[18]。通常而言,根据评价准则,特征选择方法可分为过滤式、封装式和组合式3类[21]。
粒子群优化算法(particle swarm optimization,PSO)是一种随机搜索算法,通过群体中个体之间的协作和信息共享,使整个群体的运动在问题求解空间中产生从无序到有序的演化过程,从而获得最优解[20]。通常采用K-最近邻、支持向量机、决策树等分类器作为适应度函数来评价特征集优劣程度[23]。本文结合多层次分割分类模型,选择RF算法和J48决策树算法分别构成PSO_RF和PSO_J48封装算法,应用于相应层次影像特征选择。
本文将Relief F算法与PSO封装算法有效结合,提出了Relief F-PSO二阶段组合特征选择方法(图1)。

图1 Relief F-PSO特征选择算法流程Fig.1 Relief F-PSO feature selection algorithm flow chart
首先利用Relief F算法对原始特征集中各特征进行权重排序,选择n个分类能力较强的特征组合参与Wrapper优化,达到快速降维和减少粒子搜索空间的目的; 然后运用PSO封装算法对预选特征集中各特征重要性进行度量,进一步消除冗余和不相关特征,保留对分类有贡献力的m个特征; 最后对特征重要性进行降序排列,利用RF算法与序列后向选择方法相结合的方式,每次从特征集合中删除重要性排序最后的特征,逐次迭代运算,确定特征维度与分类精度的关系,寻找最优特征子集。
2 研究区概况及数据源
研究区位于宁夏回族自治区中卫市,主要地物类型有建筑物、道路、裸地、植被、水体和阴影。建筑物形状结构复杂,屋顶颜色多样,有红色、蓝色、灰色、紫色和白色等。东部和北部建筑物群属于商品住宅区域,以封闭式小区毗邻排列,屋顶面多采用混凝土或彩色瓦片,呈浅灰色、红色和深蓝色; 住宅区内部散列分布着彩钢瓦材料的临时建筑物,屋顶面呈规则矩形且颜色均匀,影像上表现为浅蓝色。西南部多以水体和植被为主,零星分布着深灰色屋顶建筑物。因太阳高度角及建筑物本身高差影响,阴影附加于屋顶的一侧或两侧。整个区域存在建筑物、植被、道路、人工地和阴影等交错分布的复杂情况。
本研究采用2016年7月8日获取的WorldView 3遥感影像(图2),多光谱和全色影像空间分辨率分别为2 m和0.5 m,实验选取1 749×907像元大小区域,面积约0.4 km2。首先对多光谱影像辐射定标后使用FLAASH模型进行大气辐射校正,全色波段辐射定标为大气表观反射率,然后利用自带的RPC文件和数字高程模型对多光谱和全色波段数据进行正射校正,运用 Gram-Schmidt 算法融合生成0.5 m空间分辨率的遥感影像。该影像包括8个多光谱波段,根据不同波段信息量和相关系数,结合最佳指数法[24]及目标地物特点等,优选出红、绿、蓝和近红外4个波段,应用于不同类别地物的提取研究。

图2 研究区WorldView3 B3(R),B2(G),B1(B)合成影像Fig.2 Study area image with WorldView3 B3(R),B2(G),B1(B)
3 结果与讨论
3.1 影像分割
多尺度影像分割是基于光谱、形状相结合的异质性最小原则,实现影像对象同质性区域的增长合并[20]。分形网络演化算法(fractal net evolution approach,FNEA)主要利用尺度因子(scale)、形状因子(shape)和紧凑度因子(compactness)参数组合决定地物在影像中的分割结果。为获得较好的分割效果以利于目标地物的识别提取,在影像分割前有必要进行最优分割参数的选择,以使分割后影像对象与真实地物斑块能够达到较高的吻合度。
本文利用Liu等[24]提出的不一致性评价法分割参数优选模型,结合目标地物特点,选择尺度层1尺度因子取值范围为20~200,步长为20; 尺度层2尺度因子取值范围为40~400,步长为10; 形状因子和紧凑度因子均设为0.1~0.9,步长为0.1。通过欧几里德距离(ED2)与尺度因子关系(图3),确定影像最优分割参数组合,建立建筑物目标的最优尺度多层次分割体系,如图4所示。
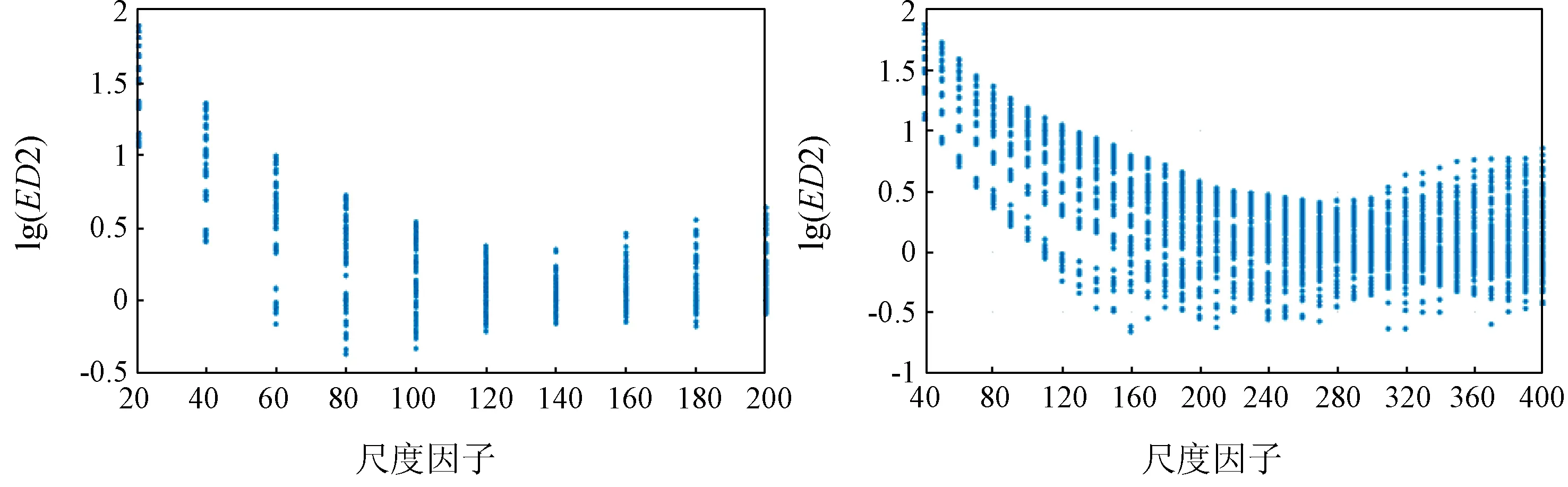
(a) 尺度层1的ED2值与尺度因子的关系 (b) 尺度层2的ED2值与尺度因子的关系
图3 ED2值与尺度因子的关系
Fig.3RelationshipbetweenED2valueandscale

图4 研究区建筑物提取分割层次Fig.4 Study area building extractionsegmentation hierarchical graph
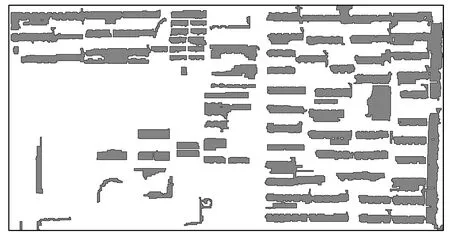
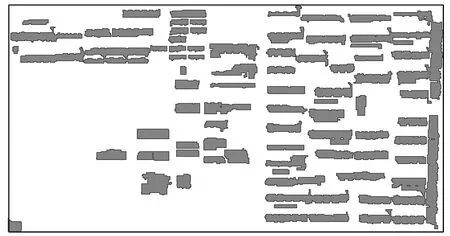
图5反映了各分割尺度所对应的影像分割效果。尺度层1中,水体、阴影和植被等地物在分割影像中表现出良好的边缘信息和真实形状。尺度层2中大部分建筑物轮廓分割相对完整,且与道路、裸地等有明显区分,但也有部分建筑物因顶部构成材质存在一定程度的褪色情况,造成光谱信息缺失而与邻近地物产生不同程度的过分割或欠分割现象。
综合来看,建议在实际生产上选用化学杀虫剂防治茶棍蓟马时,5-8月可选用30%溴虫腈悬浮剂(20 g/667m2)静电喷雾器喷施,安全间隔期为7 d;其余时间段可选用5%联苯菊酯乳油(20 g/667m2)静电喷雾器喷施,安全间隔期为7 d。
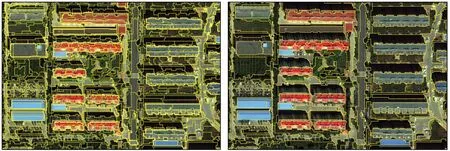
(a) 尺度层1不透水层提取影像分割结果 (b) 尺度层2 建筑物提取影像分割结果
图5 研究区影像分割结果(局部)
Fig.5Imagesegmentationresults(partial)
3.2 类间可分性
对研究区内建筑物、道路、裸地、植被、水体和阴影6类地物的多波段光谱特征进行分析,每一类地物随机选择30个样本点,并且考虑了同一类地物的光谱多样性特征和空间分布,统计结果如图6所示。

(a) 建筑物 (b) 道路

(c) 裸地 (d) 植被
图6-1 研究区典型地物各波段亮度均值及亮度箱线图
Fig.6-1Meanvalueandbrightnessboxdiagramofeachbandoftypicalfeatures

(e) 水体 (f) 阴影

(g) 亮度 (h) 示意图
图6-2 研究区典型地物各波段亮度均值及亮度箱线图
Fig.6-2Meanvalueandbrightnessboxdiagramofeachbandoftypicalfeatures
从图6可以看出,建筑物、道路和裸地的光谱曲线整体趋势大致相同,不同波段亮度均值及亮度较高,且差异较小易于混淆,但都与植被、水体和阴影的光谱响应有明显区别; 水体和阴影2类地物亮度值都较低,但水体在绿波段有明显反射峰,在近红外波段出现低谷; 而阴影在绿波段出现低谷,随后又上升,植被在近红外波段反射率陡峭上升,综合地物在各波段的光谱反射率,可利用波段之间的亮度值差异,进行特定组合及运算(差值、比值或归一化),有助于突出相关地物信息。建筑物、道路和裸地“异物同谱”现象表现突出,单纯利用光谱信息难以对其进行有效区分。
对各波段亮度标准差进行统计分析发现,建筑物、道路和裸地各波段标准差都较高,水体和阴影的标准差则较小,尤其是水体物理构成相对均一,亮度标准差为最小。建筑物、道路和裸地各类别由于构成材质不同,影像灰度表现差异较为明显,在空间中呈现出多样化的光谱特征,体现在遥感影像上即为“同物异谱”现象。在复杂城市景观条件下,光谱特征的变异性较大,严重制约了地物信息的识别与提取精度。
本文通过对WorldView3 B3(R),B2(G),B1(B)合成影像目视解译,将研究区建筑物目标按照屋顶颜色进一步分为蓝顶、红顶和灰顶建筑物3种类型,道路目标按照铺面材质分为沥青路和水泥路2种类型,裸地目标按照色彩明度分为亮裸地和暗裸地2种类型,光谱统计结果如图7所示。从图7中可以看出,各地物类内光谱差异明显,亮裸地在各波段的亮度值明显高于其他地物,可分性最好; 而不同颜色屋顶建筑物光谱曲线走势明显不同,蓝顶建筑物在蓝波段反射率较高,且红波段与近红外波段亮度值差异最大,可分性较好; 红顶建筑物在蓝、绿波段亮度值较低,而在红、近红外波段处陡峭提升; 灰顶建筑物与沥青路、水泥路以及暗裸地光谱曲线较为接近,且亮度差异较小,对象间可分性较差。
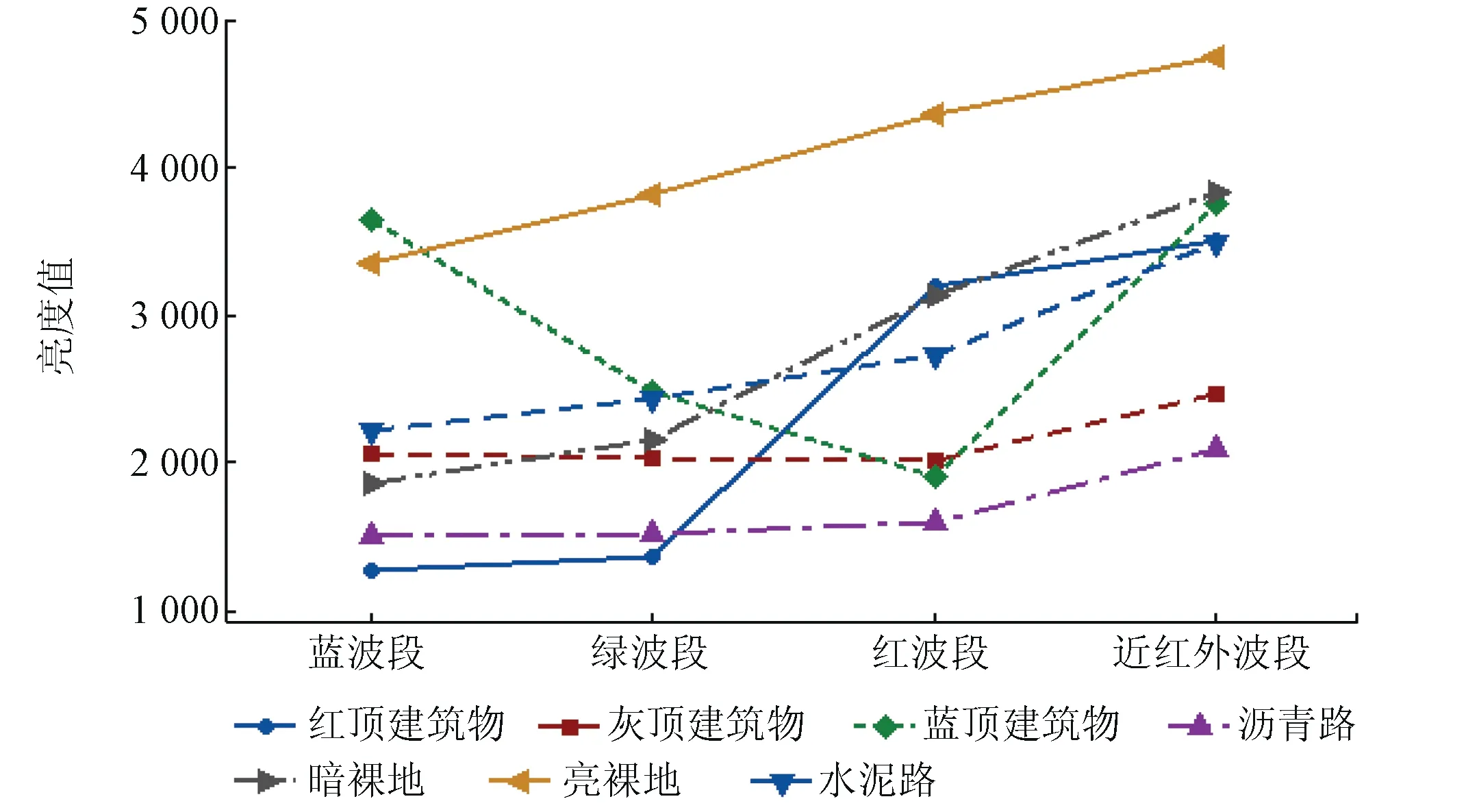
图7 研究区典型地物各波段亮度值Fig.7 Mean value diagram of each band of typical figure
3.3 基于RF算法的不透水面提取
在尺度层1中,本文共提取了影像对象的60个特征,构成影像分类原始特征集。其中,光谱特征14个,包括多光谱影像4个波段的均值、标准差、比率以及亮度和最大差分; 形状特征10个,为对象的面积、长度、宽度、长宽比、主方向、不对称性、紧致度、密度、圆度和形状指数; 纹理特征32个,为对象灰度共生矩阵(gray level cooccurrence matrix,GLCM)4个方向的均值、标准差、同质性、异质性、相关性、对比度、信息熵和角二阶矩特征值; 利用各波段之间的比值运算提取指数特征4个,包括归一化植被指数(normalized difference vegetation index,NDVI)、归一化差异绿度指数(normalized difference green index,NDGI)、归一化差异水体指数(normalized difference water index,NDWI)和比值居民地指数(ratio resident-area index,RRI)。
采用Relief F算法对原始特征集进行筛选,根据各特征权值大小,保留与目标类相关性较大的45个特征; 然后利用PSO_RF封装算法对预选特征集优化处理,依据平均袋外误分率(out of bag error,OOB)获得各特征重要性,得到对分类有贡献力的35个特征,如图8所示。可以看出优选获得的特征子集以光谱信息为主,纹理信息也较多,而形状特征数量较少且分类作用不明显。重要性最高的是多光谱各波段比率、蓝波段均值、NDGI以及NDVI。

图8 特征重要性程度分析
Fig.8Characteristicimportancedegreeanalysischart
为进一步说明选择方法对特征重要性度量的有效性,针对重要性最高的7个特征,随机选取典型地物共440个训练样本,统计得到特征归一化结果,如图9所示。可以看出,绿波段比率、近红外比率和NDVI指数对植被和水体的可分性都较高,而NDVI指数对阴影也有一定的可分性; 蓝波段比率和红波段比率对植被分类有明显优势,NDGI指数对水体区分更有利,蓝波段均值能够较好地区分出不透水面。总体而言,优选得到的7个光谱特征对4类地物具有较好的区分度,部分特征对于特定地物的区分作用也比较明显,但由于阴影与部分不透水面存在光谱相似性,容易产生混淆问题。

图9 典型地物样本特征分析Fig.9 Characteristic analysis diagram of typical feature samples
在地物光谱特征分析的基础上,为更加合理地确定最优特征子集的大小,采用RF算法与后向序列选择方法相结合的方式,对预选特征子集中重要性降序排列的45个特征进行迭代分类,10折交叉验证得到特征数量与分类精度和卡帕系数之间的变化关系,如图10所示。

图10 总体精度和Kappa系数与特征数量之间的关系图Fig.10 Relationship between the overall accuracy andthe Kappa coefficient and the number of features
从图10中可以看出,分类特征数量较少时,因不足以提供区分信息,模型分类精度不高; 随着特征数量增加,参与分类的信息更多,但精度反而会有所降低,说明加入冗余特征会对分类器性能产生不同程度的影响,合适的特征维度至关重要。从结果中可以看出,当特征数量为18时,总体精度和Kappa系数达到最高点,故而选取前18个特征(表2)作为最优特征空间进行RF分类,获取不透水面的分布结果(图11)。

表2 不透水面提取最优特征集Tab.2 Optimal feature sets for impervious classes

图11 基于RF算法的不透水面提取结果Fig.11 Impervious ground extraction results based on random forests
3.4 基于J48决策树算法提取建筑物类
J48决策树是在C4.5算法的基础上,增加了有效的剪枝过程,训练出的规则易于理解且准确度较高[25]。叶节点中所需实例的最小数量M以及用于修剪的置信系数C,是决策树学习器2个重要的调整参数,其取值会直接影响分类效果,因此需要进行参数寻优[26]。
在尺度层2中,本文针对建筑物(红顶、蓝顶和灰顶)、道路(沥青路和水泥路)和裸地(亮裸地和暗裸地)共计7种地物类型进行分类研究。在尺度层1中提取的影像对象光谱、形状和纹理特征中加入2个空间关系特征,即与相邻阴影类对象的距离和相对边界,共计62个特征构成原始特征集。置信系数C取值为0.1~0.5,步长为0.1,最小数量M设为1~10,步长为1。利用Relief F-PSO_J48特征选择方法对特征集和决策树参数进行同步优化,获得最优特征子集(表3)及整定后参数值C为0.1,M为3。从表3中可以看出特征子集中光谱特征信息数量较多,其次是纹理特征,而形状特征只有密度信息。

表3 建筑物提取最优特征集Tab.3 Optimal feature sets for building classes
为进一步分析说明影像分类过程中顾及地物光谱差异的必要性与可行性,随机选取典型地物共120个样本,统计得到最优特征集中近红外波段均值、近红外波段标准差、蓝波段比率、绿波段比率、密度以及GLCM角二阶矩90°的特征值归一化结果,如图12所示。由图12可知,不同颜色屋顶的建筑物在光谱特征上都表现出了显著差异,尤其在蓝波段比率和绿波段比率特征上最为明显,且蓝波段比率对蓝顶建筑物、绿波段比率对红顶建筑物具有较好的区分度; 沥青路和水泥路在近红外波段均值及标准差特征上有较大差异,亮裸地和暗裸地在GLCM角二阶矩90°方向差异明显; 灰顶建筑物与道路、裸地存在一定混淆现象,很难利用某一特征对其有效区分; 密度和近红外波段标准差分布相似,地物具有一定的可分性,但可分性不强; 因此,需要组合利用对象的空间、光谱和纹理特征,提高建筑物对象之间以及与其他地物之间的可分性。
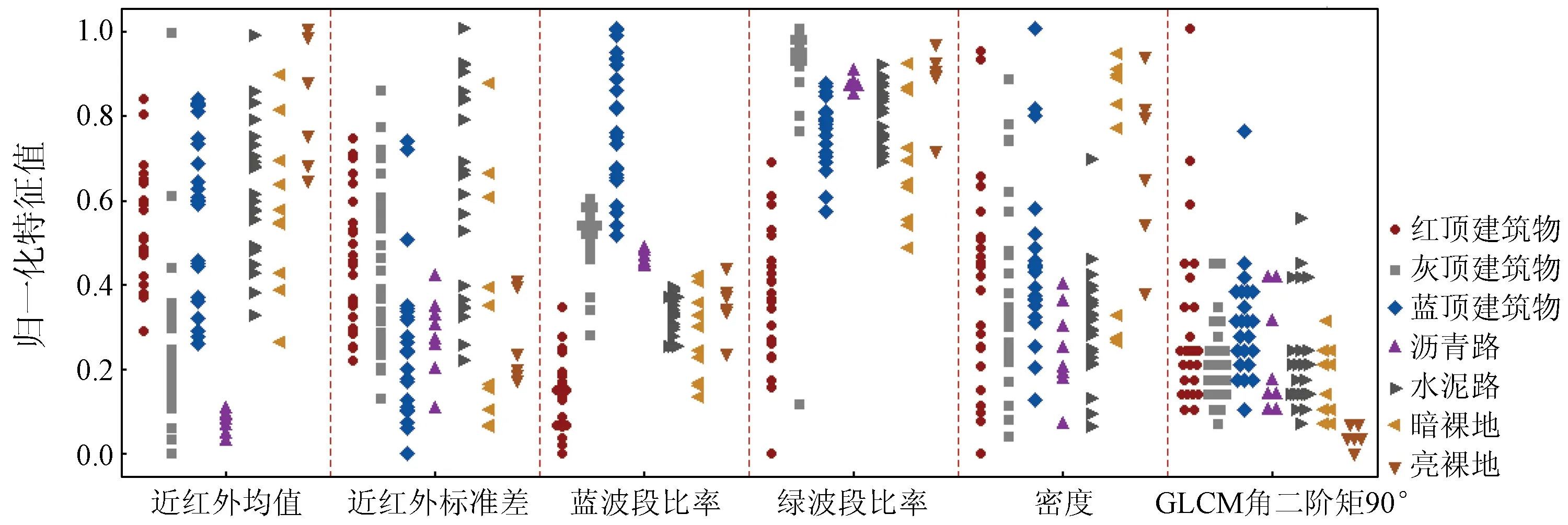
图12 典型地物样本特征分析Fig.12 Typical feature sample analysis
利用选择的8个最优特征,以J48决策树为分类器,设置相关参数对训练样本数据进行模型学习,10折交叉验证模型的正确分类率为89.52%,Kappa系数为0.87。得到研究区地物提取规则集及变量阈值(表4)。将相关特征和阈值按照先后顺序应用到eCognition软件中,从不透水面中分类提取出红顶、蓝顶和灰顶建筑物。将不同颜色屋顶建筑物提取结果进行合并,通过设定建筑物面积阈值(area≤68.05),滤除影像中噪声图斑。再采用“先开后闭”的数学形态学方法进行优化处理,卷积核大小均设为3×3,有效填补了建筑物内部孔洞,使几何形态进一步规则化,结果如图13所示。

表4 研究区地物提取规则集Tab.4 Feature extraction rule set

图13 研究区影像建筑物最终提取结果Fig.13 Final building extraction results
4 对比实验及精度评价
4.1 对比实验
为进一步验证说明多层次影像分割分类过程中,影像层次构建的合理性,特征选择方法的有效性和顾及地物类内光谱差异的必要性,本文针对性地采用3种分类方法进行了对比研究。其中,方法一利用“单一尺度层”进行影像分割,并结合RF算法对建筑物进行分类提取; 方法二根据经验知识和地物特点,人为分析选择典型特征构建影像知识库分类提取建筑物; 由于地物光谱多样性特征在逻辑学上可被解释为属种关系,属概念反映了地物类别所具有的共性,而种概念则表示不同子类的个性,本文方法是从种概念的角度出发,采用多元化处理方式提取了建筑物信息,因而方法三基于地物属概念,在不考虑光谱多样性前提下,将建筑物整体上作为“一类地物”进行分类提取。结果如图14所示。

(a) 基于单一尺度层方法提取建筑物结果
(b) 基于经验特征方法提取建筑物结果
(c) 基于地物属概念方法提取建筑物结果图14 不同分类方法建筑物提取结果Fig.14 Building extraction results from different classification methods
4.2 精度评价
为定量评价分类效果,通过人工目视解译,获得研究区建筑物矢量数据,作为参考数据分别统计建筑物正确提取、错分和漏分面积,并利用错分率(FP/TP)、漏分率(FN/TP)、完整率(TP/(TP+FN))和准确率(TP/(TP+FP))4个指标评价建筑物提取结果[20],其中,TP为正确提取的建筑物面积;FN为漏分的建筑物面积;FP为错误识别为建筑物的面积。对上述各分类方法中使用影像特征数量及成果精度进行统计,结果如表5所示。

表5 不同分类方法相关数据统计比较Tab.5 Statistical comparison of data relatedfrom different classification methods
从统计结果可以看出,不同方法在分类过程中所使用的特征信息数量不同,成果精度也会有所差异。按照特征数量平均值大小排序为: 本文方法<单一尺度层方法<地物属概念方法<经验特征方法; 建筑物信息提取的完整率顺序为: 本文方法>单一尺度层方法>经验特征方法>地物属概念方法; 分类成果准确率排序为: 本文方法>地物属概念方法>经验特征方法>单一尺度层方法。
结合分类效果,可以得出如下结论: ①采用单一尺度层对不同类型地物目标提取,容易造成地物“过分割”与“欠分割”问题,分类出现严重的错漏分现象,成果准确率下降了12.45%; ②根据专家经验知识和影像地物特点,人为分析选择典型特征参与影像分类,会造成建筑物目标提取的完整率和准确率分别下降9.63%和8.26%; ③不考虑地物光谱多样性特征,将其整体上作为“一个类别”进行分析研究,容易造成光谱相似性地物之间的错分现象,成果完整率下降了11.74%; ④本文方法能够利用最少数量的影像特征信息,获得最高精度的建筑物提取成果,完整率和准确率分别为91.77%和80.64%。
5 结论
针对高空间分辨率遥感影像城市景观复杂,“同物异谱”和“异物同谱”现象较为突出,地物信息提取面临很大挑战和干扰,特别是建筑物与道路、裸地等不透水面因光谱混淆严重而难以区分的问题,本文在基于对象影像分析方法的支持下,顾及地物多尺度特性及光谱多样性特征,采用层次化分割分类处理的方式,并结合特征选择方法优化构建了相应层次的特征空间,实现了遥感影像城市建筑物信息的有效提取。通过将本文方法与“基于单一尺度层”、“基于经验特征”和“基于地物属概念”3种针对性提取方法的分类结果进行综合对比分析,结果表明: 本文方法能够利用最少数量的影像特征信息,获得最高精度的建筑物提取成果,完整率和准确率分别达到91.77%和80.64%。本文还需改进的地方在于: ①针对样本选择问题,研究如何减少人工干预的情况下,获取更优质量的样本,为特征选择提供更科学的依据; ②本文方法只验证了对小场景小城市建筑物的识别效果,对于具有摩天大厦、高层住宅区和棚户区等分布复杂的大城市区域,需要进一步通过实验来精细区分建筑物类型,并针对性地开展相关研究,以提高分类模型的适应性。
