基于单片机的水下机器人图像识别研究
2019-09-10周思宇刘青松朱媛媛郑贝贝檀棋
周思宇 刘青松 朱媛媛 郑贝贝 檀棋
【摘 要】随着人们对深海的不断探索,水下机器人便应运而生。本文利用单片机设计了一款水下机器人,以stm32单片机为控制核心,机器人系统能够实时获取水下图像,并且能通过视频图像反馈来调整控制作业机器人的姿态,通过控制机械臂完成水下作业。文中重点讨论了图像采集系统中的视频图像预处理方法,获得了较好的整体图像效果。
【关键词】单片机;水下机器人;图像增强;图像滤波
1.引言
随着科学技术和社会的发展,陆地上的资源已经渐渐满足不了人类的需求,人们就着手于开发海洋资源。但是水下环境恶劣,人类的客观条件等因素也限制了潜水深度,所以水下机器人已经成为开发海洋的重要工具。水下机器人的出现大大节省了成本,它可以代替人完成深海摄像和采集标本等工作,探测器上不用加装生命维持系统,大大节省了海洋探测的成本。本文利用单片机设计了一款水下机器人,以stm32单片机为控制核心,电源采用搭载蓄电池,通过电源电路分别给单片机,树莓派和直流无刷电机供电,机器人系统能够实时获取水下图像,并进行图像预处理,获得了较好的整体图像效果,以便能通过图像的反馈来调整控制作业机器人的姿态,通过控制机械臂完成水下作业。
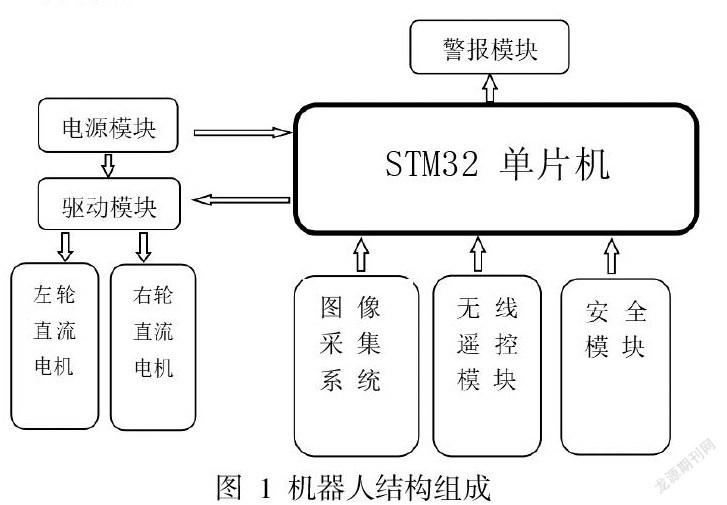
2.水下机器人总体结构
本文设计的水下机器人如图所示,由stm32单片机,图像采集系统,无线遥控模块,驱动模块,电源模块及报警模块组成。同时机器人还装备一个多自由度的机械手臂以完成标本的采集、放置等一系列动作,机器人安装有摄像头以进行水下视觉采集、同时还具有水下机器人定高巡航、数字图像处理等功能。
无线收发器采用封装式无线电收发装置,PT2262/2272是一对带地址、具有数据编码功能的无线遥控收发芯片,功耗低,CMOS制造工艺,外部元件少,RC振荡电阻,工作电压范围为:2.6-15V,数据为6位,地址代码高达531441。该套无线收发芯片操作简单,价格合适,工作稳定性强。
该芯片以STM32为主控芯片,具有足够的存储空间,可以满足系统软件的需求。具有两个中断计数器,满足本工作系统的需要,精确计算时间,具有良好的实效性。
3.图像采集及预处理
图像采集系统负责采集水下图像信号,为取得较好的、完整的图像,必须对图像进行预处理。下面主要讨论图像识别的预处理。
3.1水下图像特点
由于水的光学特性的作用,水下图像有如下几个显著特点:
(1)水对光具有吸收作用,会造成水下彩色的丢失,给摄象图像的识别带来很大的困难。(2)水中对光源阻光、折射、散射效应,以光源为中心,径向逐渐减弱,造成图像背景灰度灰度不均匀。(3)水体本身的性质和水中的悬浮体、活性有机体的存在,会造成水下图像的对比度低、噪声明显等。
3.2空间域图像处理
目前,图像噪声的滤波方法有低通、带通、均值、平滑以及锐化、中值滤波方法等等,滤波的目的是为包括图像边缘提取,图像分割等后续图像的进一步处理打好基础,也可应用于图像的重建和复原。直方图均衡化(HE, Histogram Equalization)能够使图像中的所有灰度级概率均勾分布,使图像得到增强,但如果同一个变换对整幅图像都采用,这样就不能适应不同区域的对比度变化情况,为了克服这一缺点,我们可以采用自适应方法进行局部直方图均衡化,不同的图像区域采用不同的其灰度变换函数,也可以采用动态变化窗口大小的均衡化方法,都具有比较好的处理结果。
3.3频率域图像处理
选择合适的滤波器函数对图像的傅里叶变换函数频谱成分进行调整,调整后再进行傅里叶逆变换,这样使得图像得到增强。为了获得感兴趣的区域同时去掉或削弱噪声和无关信号,在频域增强技术中可以有针对性的选择频率传递函数。对于需要增强的频率分量,可增加对应的频率传递函数的系数;若降低对应传递函数的系数,可抑制或衰减的频率分量。
低通滤波可以使图像有效的平滑降噪,高通滤波器是抑制和衰减低频分量的,因此,利用高通滤波可保留图像边缘和急剧变化的细节信息。
由于水下光照条件的限制,图像会出现照度不均匀的情况,可应用同态滤波解决光照问题和突出细节信息,调节图像的灰度范围。同态滤波是将图像分解为反射、照度两部分,应用对数运算将乘性噪声的照度成分转化为加性噪声,再通过选择合适的滤波器函数对图像的傅里叶变换函数频谱成分进行调整获得处理改善图像的效果,保持了图像的整体性。
4.结论
本文首先讨论水下机器人的设计思路、给出了机器人的整体结构,讨论了水的光学作用特点,及水对光的阻光、散射等因素的影响,重点讨论了从空间域和频率域两方面,图像预处理的方法。空间域是基于像素的处理方法,包括直方图修正、灰度变换和空间域滤波等;频率域是基于图像的增强方法,包括同态滤波等,试验表明,在光照不均的水下图像中能够获得较好的图像效果。在水下机器人的图像识别能力的设计,旨在让机器人能更好的在水下进行交互工作,同时水下机器人有着人力无法企及的地方,极大的提高了我们对海洋的探索。
参考文献:
[1]徐义.下图像预处理技术研究[硕士学位论文].南京理工大学,2013.
[2]R. Garcia,T. Nicosevici and X. Cufi. On the way to solve lighting problems in underwater imaging. IEEE OCEAN, 2002,10:1018-1024.
[3]Xuefei Liu, et al. A Rapid Weighted Median Filter based on Saliency Region for Underwater Image Denoising.,IEEE OCEAN, 2015.
基金项目:
本文得到嘉兴学院南湖学院大学生创新项目(NH8517930)资助。
作者简介:
周思宇,嘉兴学院电气工程及其自动化专业学生,研究方向為智能控制。
(作者单位:嘉兴学院南湖学院)
