高山峡谷区带状地形图空地一体化测绘方法研究
2019-09-10方留杨杨成杨涛王开洋
方留杨 杨成 杨涛 王开洋


摘要:针对在高山峡谷区利用无人机测绘长线路带状地形图存在精度不足的问题,提出了一种结合无人机倾斜摄影测量技术和车载激光扫描技术的高山峡谷区带状地形图空地一体化测绘方法。首先,归纳了高山峡谷区无人机测绘带状地形图存在的3个主要问题:控制点数量偏少和分布不均、传统航测空三加密方式不适应倾斜摄影空三加密、无人机点云非地形噪点滤除难度大,并分别给出了相应的解决方案。基于上述解决方案,提出了完整的带状地形图测绘流程和方法。实验验证结果表明:在无人机倾斜摄影测量生成的带状地形图满足工程带宽要求的基础上,结合车载激光扫描技术后,地形图测绘精度进一步提高,可以满足大比例尺工程地形图的实际测绘需要。
关键词:无人机倾斜摄影测量; 车载激光扫描; 长线路带状地形图测绘; 高山峡谷区; 空地一体化
中图法分类号: TP391文献标志码: ADOI:10.16232/j.cnki.1001-4179.2019.01.024
当前,我国大规模的公路水路建设工程逐渐从中东部发达省份向西部欠发达省份延伸。根据公路水路工程特点,长线路带状地形图测绘普遍采用无人机航测方式进行[1-3]。然而西部地区高山峡谷纵横、地形地貌复杂,无人机航测的误差来源较多,生成的地形图精度有时无法满足工程实际需求。因此需要探索適合高山峡谷区的,效率更高、精度满足实际工程需求的新型带状地形图测绘方法。
无人机倾斜摄影测量技术是国际测绘领域近些年发展起来的一项高新技术,该技术同时从1个垂直、4个倾斜等5个不同的角度采集影像,将用户引入了符合人眼视觉的真实直观世界[4-5]。由于通过倾斜摄影方式增大了航片交会角,因此可在一定程度上提高地形图的高程精度[6]。此外,在后续附带生成的真三维模型上进行地物要素勾绘,利用其360° 全景旋转、无级缩放等特点,可较传统勾绘方式更加准确地采集地物要素。
车载激光扫描是近年来迅速发展的又一项新型测绘技术,已广泛应用于地形图生成、高精度断面数据获取、土石方量计算、可量测街景数据制作、地籍测量等行业领域[7-11]。该技术以同步获取目标范围的三维坐标数据和全景照片的方式获取大型实体或实景等目标的三维立体信息,为快速采集空间数据提供了有效手段,测绘物体表面空间坐标的标称精度可以达到厘米级,有望解决高精度地形图的测绘问题[8]。
如何解决在高山峡谷区用无人机测绘带状地形图精度不足的问题,目前尚无相关文献对其进行讨论。针对该问题,本文基于空地一体化的思想,提出一种同时将无人机倾斜摄影测量技术和车载激光扫描技术相结合,共同进行带状地形图测绘的方法,确保在地形图带宽符合工程要求的基础上,进一步提高地形图的精度。
1原理与方法
在平原和丘陵地区,使用无人机航测地形图的应用已经十分广泛,其精度可以满足公路水路设计带宽和精度要求,具体流程为:开展控制测量并加密布设地面控制点、无人机航空摄影、空中三角测量(空三)加密、内业测图、外业调绘及精度检查[12],但在高山峡谷区测绘长线路带状地形图时,与平原和丘陵地区相比,还存在以下问题。
(1) 在高山峡谷区域,由于受到地形限制,导致外业控制点布设难度较大,控制点数量偏少、分布不均,有时甚至难以完整覆盖航摄区域,造成无人机空三处理和后续生成地形图的精度偏低。
(2) 为了提高高山峡谷区地形图测绘的高程精度,可采用无人机倾斜摄影技术,同时获取前视、下视、后视、左视、右视影像,以增大影像交会角。但与传统航测相比,无人机倾斜摄影获取的影像数量多、重叠度高、倾角大,因此不能采用传统的航测空三加密方式对倾斜摄影影像进行空三加密。
(3) 无人机点云通过倾斜摄影测量密集匹配方式得到,通常会包含大量树木、植被等非地形噪点,在高山峡谷区,通过传统调查方式滤除非地形噪点存在较大的难度。
针对上述3个高山峡谷区无人机测绘带状地形图面临的典型问题,本文引入车载激光扫描技术和五视倾斜摄影空三加密方法予以解决,具体方法如下。
1.1车载点云辅助的控制点布设方案
为了解决外业控制点数量偏少、分布不均的问题,本文首先通过车载激光扫描技术采集点云数据,然后从点云数据中提取特征点作为控制点,与外业控制点一起参与无人机倾斜摄影空三处理。
在高山峡谷区,公路通常临崖而建,因此外业采集的控制点主要布设在峡谷沿公路一侧,峡谷对岸无分布,而车载点云控制点刚好与其相反。上述两种控制点分布位置的互补使其为共同进行无人机空三处理奠定了基础。在精度方面,车载激光扫描点云在GPS信号良好的前提下,定位误差小于5 cm,完全可以满足大比例尺地形图成图对像控点中误差的要求;如果GPS信号较弱,短时间内(1~2 min)可以将之前GPS信号较强时获取的位置数据作为基准,使用惯导(IMU)+ 车轮编码器的方式,通过外推解算来保证车载点云像控点精度;若GPS信号在较长时间(超过3 min)内都处于较弱状态,则需要在点云数据中加入控制点,对点云进行修正和纠偏处理,以保证像控点的精度。
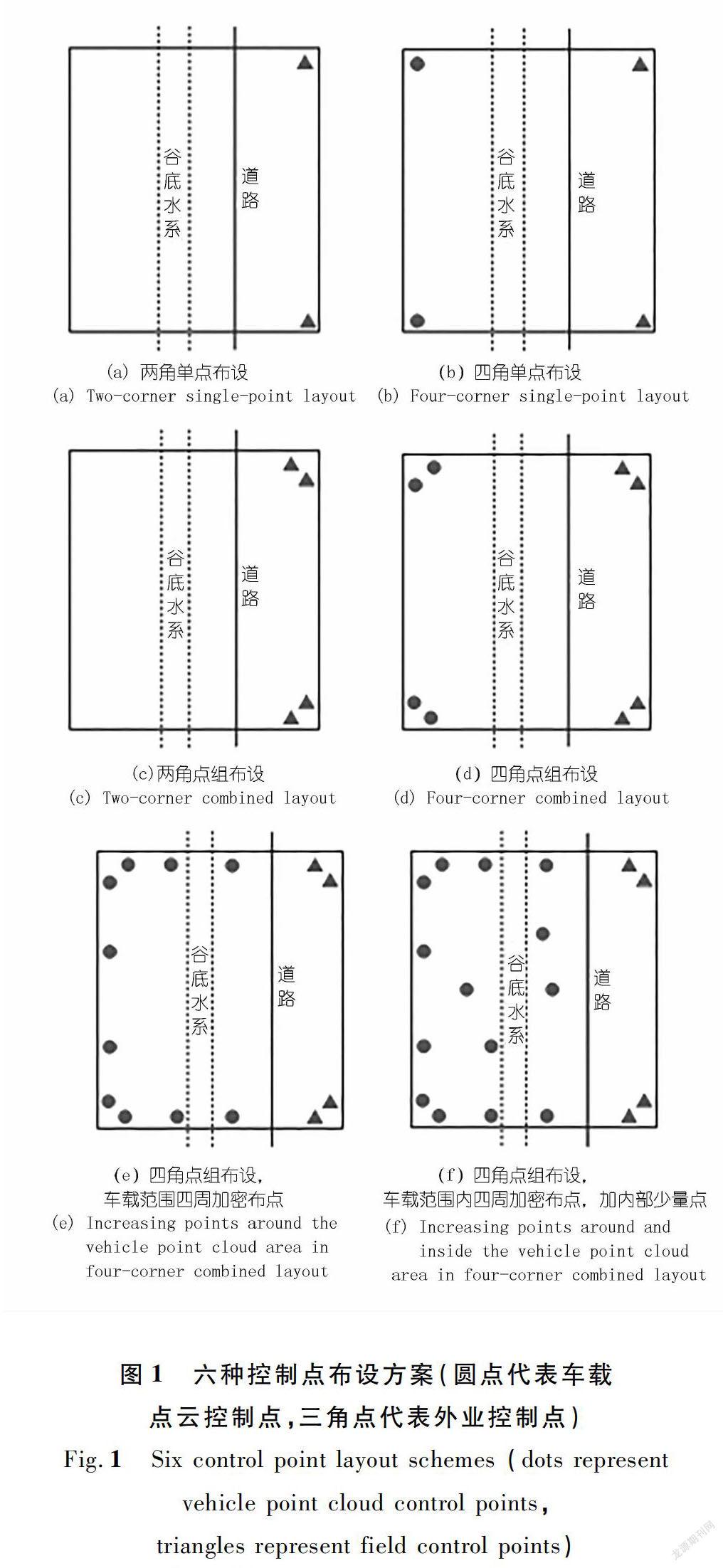
研究表明,改变控制点的布设位置、分布和数量,会对无人机空三加密的精度产生显著影响[13]。根据高山峡谷区的地形特点,以及控制点的数量和分布特性,本文选择6种布点方式开展实验(如图1所示)。
(2) 四角单点布点方式(图1(b)):即在各个航段的四角布设控制点,其中峡谷沿公路一侧布设外业采集控制点,峡谷对岸一侧布设车载点云控制点。
(3) 两角点组布点方式(图1(c)):即在各个航段峡谷沿公路一侧的两个角将外业采集控制点布设成点组形式。
(4) 四角点组布点方式(图1(d)):即在各个航段的四个角将控制点布设成点组形式,其中峡谷沿公路一侧布设外业采集控制点组,峡谷对岸一侧点组布设车载点云控制点组。
(5) 四角点组布点,车载点云扫描范围内四周加密布点方式(图1(e)):即在第(4)种布点方式的基础上,利用车载点云具有高冗余度的特性,在航段四周加密布设车载点云控制点。
(6) 四角点组布点,车载点云扫描范围内四周加密布点,区域内部少量布点方式(图1(f)):即在第(5)种布点方式的基础上,加密布设区域内部控制点。
1.2五视倾斜摄影空三加密
五视倾斜摄影空三加密的求解方式与传统航测空三加密的求解方式有明显的不同:传统航测空三加密是将影像的外方位元素作为未知数,而五视倾斜摄影空三加密则是将下视影像的外方位元素、各倾斜影像相对于下视影像的相对姿态和位置等作为未知参数求解,如式1所示。
XYZ =λRIMURmis(R*xy-f+X′Y′Z′)+XGPSYGPSZGPS(1)
式中,x,y为影像像点坐标;f为相机主距,X,Y,Z为影像像点对应的工程局部坐标系下的坐标,上述为已知观测值。RIMU为惯导(IMU)坐标系到工程局部坐标系下的旋转矩阵;Rmis为下视影像坐标系到惯导坐标系之间的旋转矩阵;R为倾斜影像相对于下视影像角元素得到的旋转矩阵;X′,Y′,Z′为倾斜影像相对于下视影像的线元素,XGPS,YGPS,ZGPS为GPS获取的摄站坐标,上述为待求解参数。求解时,通过已知的外业控制点坐标值,以及估计的待求解参数初值,构造误差方程和法方程,采用最小二乘法迭代求收敛解。
1.3滤除点云非地形噪声点
初次获取的车载和机载点云数据中含有大量的树木、植被和个别空中浮点等非地形噪声点,需对其进行滤除处理以确保点云数据能够准确表达地形。
在滤除车载点云噪点时,本文采用了一种基于影像辅助的滤波方法。首先,将车载点云数据和同步采集的全景影像进行配准,使全景影像能与物方坐标系下同一场景的激光点云进行“套合”,具体方法如下。
(1) 首先在场景中选取4个以上标志点,通过共线方程迭代求解CCD镜头与激光点云在扫描仪坐标系下的相对配准参数,从而实现单张面阵CCD影像与点云的相对配准。
(2) 分别建立单张面阵CCD影像与全景影像的映射关系(全景拼接时精确得到)、激光扫描仪坐标系与POS坐标系的转换关系(通过建立高精度标定控制场解算获得)、POS坐标系与WGS-84坐标系的转换关系(由POS数据插值获取),根据单张面阵CCD影像与激光点云的相对配准关系,通过三次坐标映射转换,从而实现车载全景影像在物方坐标系下与激光点云的高精度配准[14]。点云数据和全景影像配准完成后,即可在全景影像上确定非地形噪声点,并映射至车载点云数据上进行去噪,由于影像可以更加清晰地表现非地形噪声点的轮廓,使用该方法可有效提高点云去噪的效率和精度。
在滤除机载点云噪点时,可利用上一步已经完成去噪处理的车载点云,通过车载点云和机载点云抽稀合并的方式来滤除。为此,本文提出了一种基于二次投影抽稀的机载点云去噪方法,步骤如下。
(1) 在机载点云噪点范围内,对机载点云和车载点云数据进行一次投影抽稀处理,投影方式选择最低点投影,点云抽稀密度则以地形图生成的需要为准,通过该方式可以滤除机载点云数据中的小规模噪点(例如独树、房屋等)。
(2) 将经过一次投影抽稀处理的机载点云和车载点云数据进行合并,由于合并后的点云密度会增大,因此再进行第2次最低点投影抽稀处理,进一步滤除残留的较大规模的非地形噪声点(如成片树林等)。
(3) 对车载点云覆盖范围外的机载点云数据进行检查,如果有残留的非地形噪声点,则进行地形高度改正,确保最终数据的准确性。滤除点云非地形噪声点的流程如图2所示。
综上所述,高山峡谷区空地一体化带状地形图的测绘流程为:
(1) 采集车载点云数据。
(2) 从车载点云数据中提取特征点作为无人机控制点,与外业控制点一并参与无人机空三处理,生成无人机点云数据。
(3) 基于影像辅助的点云滤波和二次投影抽稀方法滤除非地形噪声点,生成DEM并得到等高线地貌图。
(4) 使用车载全景影像和无人机三维模型完成地物要素的矢量化,从而完成地形图测绘工作,如图3所示。
2实验与验证
2.1实验区域和设备
本文实验区域为云南省大理白族自治州云龙县宝丰乡至大栗树村二级公路改扩建工程走廊带,如图4所示。该区域地处沘江下游河谷地带,距县城石门11 km,东与云龙县团结乡、关坪乡接壤,南与永平县交界,西依云龙县功果桥镇。地势由北向南倾斜,地形复杂,山势陡峭,山地占90%,河谷小坝仅占10%,平均海拔为1 500 m。植被主要为玉米、烟草及散落的灌木、矮树等。既有老路沿沘江东岸顺江而下,靠山临崖,等级较低,公路改扩建里程全长约30 km。在地形图测绘之前,已经完成了沿线28个GPS四等控制点的测设工作,平面坐标数据起算点由当地国土部门提供,坐标系为1980西安坐标系,高程采用1985国家高程基准。
由于高山峡谷地区地形起伏大、路线等级低、急弯较多,因此本文选择大疆S900六旋翼无人机进行倾斜摄影,同步搭载五镜头倾斜相机和动态GPS/GLONASS双频定位设备。车载点云采集設备为武大卓越三维激光扫描车“iScan”,该系统由武汉武大卓越科技有限公司和广州中海达卫星导航技术股份有限公司联合研制。“iScan”上搭载了一套德国产Faro X330激光采集仪,其测量频率为976,000点/s,测距精度±2 mm;GPS和惯导系统为加拿大Novatel公司SPAN-FSAS,平面定位精度为0.05 m,高程为0.1 m,三轴(俯仰/翻滚/旋转)定姿精度分别为0.01°/ 0.01°/ 0.025°。
在软件方面,无人机数据处理软件选择Bentley Contextcapture,点云数据处理和影像配准软件为海达数云HD 3lsScene,地形图编辑软件为南方CASS,真三维模型地物要素矢量化软件为天际航DP-Modeler。
2.2地形图测绘过程
无人机航飞作业时,考虑到测区地形情况,为了保障无人机飞行安全,本文将飞行航高设置为比测区内基准面高200 m,并将30 km路段划分为30个航段,每个航段平均长度约1 km,布设各航段航线;飞行带宽为公路中线两侧各约200 m,总约400 m;地面分辨率设置为0.05 m;此外,在高山峡谷地区,为提高高程交会精度,本文将像片的航向重叠度和旁向重叠度都设置为75%。航线设计完成后,进行设计情况检查,本文选择测区最高点的重叠度(OVPH)和最低点的地面分辨率(GSDL)两项指标进行检查,确保其满足设计指标要求,计算公式分别如式2,3所示。
OVPH=(OVP航-h高-h基h相)/(1-h高-h基h相) (2)
GSDL=h高-h低+h相f×pd (3)
式中,h基为基准面高程,h低为最低点高程,h高为最高点高程,h相为相对航高,OVP航为航向重叠度,f为焦距,pd为单像元大小。
在控制点采集方面,由于受到高山峡谷地形限制,沘江东岸(既有老路一侧)的控制点通过人工外业采集方式得到,采集时按照满足各个航段两角点组布设的原则进行,共计采集了68个点,精度满足《公路勘测规范》(JTG C10-2007)(以下简称《规范》)中对二级公路控制点的相关要求。沘江西岸地形陡峭区域的控制点则从车载点云中提取特征点得到,针对1.1节中提出的四角单点布设、四角点组布设、四角点组布设+车载范围四周加密布点、四角点组布设+车载范围内四周加密布点+加内部少量点4种布点方式的具体需求,分别从车载点云中提取了34,67,182,257个特征点作为控制点,其精度满足《规范》中对二级公路控制点的精度要求。接下来,通过五视倾斜摄影空三加密方法对6种布点方式分别进行空三加密,并使用逐像素多视密集匹配算法完成机载点云数据生成工作[15]。点云生成后,采用1.3节提出的方法滤除点云非地形噪声点。
生成地形图时,首先使用去噪后的点云数据生成数字高程模型(DEM),对其内部及边界进行修正,然后用修正后的DEM生成等高线。接下来进行地物要素采集,本文使用激光扫描车全景影像和无人机三维模型作为要素采集源,开展采集工作。由于全景影像和三维模型中的地物要素具有实际的三维空间坐标和纹理信息,因此可以通过三维旋转、无级缩放等功能,获取地物要素精确的边界和类型信息,从而提高地物要素的采集精度。
2.3地形图精度验证
为了对地形图精度开展实际验证,在既有老路(沘江东岸)一侧通过外业实地采集了40个平高检查标志点,在沘江西岸一侧选取了30个点云特征点作为平高检查标志点,分别对通过6种控制点布设方案生成的地形图精度进行了实际验证,结果如表1所示。
对表1中的实验结果进行分析,可以得出如下结论。
(1) 两角单点布设(方式1)生成地形图的精度最低,这是由于使用的外业控制点数量最少,且没有完整覆盖测区范围,导致沘江西岸地形陡峭区域的高程精度较差,从而降低了地形图的整体精度。相比之下,四角单点布设(方式2)增加了控制点的数量并完整覆盖了测区范围,使得生成地形图的精度明显提高。
(2) 四角单点布设(方式2)生成地形图的精度高于两角点组布设(方式3)生成地形图的精度,虽然两种方式使用的控制点数量基本相同,但相比于点组布设,控制点完整覆盖测区范围更有利于提高地形图的精度。
(3) 四角点组布点+车载点云扫描范围内四周加密布点+区域内部少量布点(方式6)的精度最高。使用该方式生成的地形图的平面和高程精度分别为0.15 m和0.25 m,完全可以满足《规范》中1∶2 000地形图测量要求,为类似工程的带状测图项目提供了新的解决方案。
(4)四角点组布点+车载点云扫描范围内四周加密布点(方式5)的精度比方式6稍低(地形图平面和高程精度分别为0.22 m和0.34 m),但也能够满足《规范》中1∶2 000地形图测量要求。在某些对精度要求不是很高的应用领域,采用此方式布点可以节省控制点的布点数量,提高作业效率。
3结 论
本文提出了一种基于无人机倾斜摄影测量和车载激光扫描技术的空地一体化新型带状地形图测绘方法,解决了在高山峡谷地区传统无人机航测生成地形图精度不足的问题,得到如下结论。
(1) 在无人机倾斜摄影测量生成的地形图满足带宽要求的基础上,结合车载激光扫描技术后,地形图精度进一步提高。在实验区域对测绘的地形图进行精度验证,发现采用四角点组布点+车载点云扫描范围内四周加密布点+区域内部少量布点方式生成的地形图精度最高,完全可以满足《公路勘测规范》(JTG C10-2007)中1∶2 000地形图的精度要求,为高山峡谷区类似工程的带状测图项目提供了一种新的解決方案。在某些对精度要求不是很高的应用领域,采用四角点组布点+车载点云扫描范围内四周加密布点的方式也能够满足《规范》中1∶2 000地形图测量要求,此时可以节省控制点的布点数量、提高作业效率。
(2) 在去除非地形噪声点时,对于车载点云数据,可以使用基于影像辅助的滤波方法进行,以有效提高点云滤波的效率和精度;对于机载点云数据,在车载点云覆盖范围内,可以使用二次投影抽稀的方法进行,以有效降低传统调查方式的工作量。
(3) 本文实验区域为典型的高山峡谷区,沿既有老路(沘江东岸)一侧地势陡峭,基本没有车载点云数据分布,因此车载点云数据无法完全替代机载点云数据。在该类型区域,机载点云数据对于补充地形图的带宽具有重要的作用。
参考文献:
[1]唐健林,董向勇.小型数码航空摄影在大比例尺地形测绘中的应用[J].人民长江,2011,42(9):55-57.
[2]杨伯钢,李兵,李雷.無人机技术在新疆和田大面积地形图测绘中的应用[J].测绘通报,2012(8):21-23.
[3]戴中东,羊远新,孟良.低空无人机在高原大比例尺地形图测绘中的应用[J].工程勘察,2016(11):50-55.
[4]王琳,吴正鹏,姜兴钰,等.无人机倾斜摄影技术在三维城市建模中的应用[J].测绘与空间地理信息,2015,38(12): 30-32.
[5]刘洋.无人机倾斜摄影测量影像处理与三维建模的研究[D].抚州:东华理工大学,2016.
[6]张惠均.无人机航测带状地形图的试验及分析[J].测绘科学,2013,38(3):100-102.
[7]李志鹏,张辛,喻守刚,等.基于三维激光扫描的大比例尺地形测绘方法研究[J].人民长江,2014,45(7):70-73.
[8]赵永国,黄文元,郭腾峰.地面三维激光扫描技术用于公路工程测量的试验研究[J].中外公路,2009,29(4):282-285.
[9]杨伯钢,韩友美.车载移动激光扫描技术大比例尺测图技术分析[J].测绘科学,2013,38(1):106-108.
[10]张攀科,裴亮,王留召,等.车载激光扫描系统在地籍测量中的应用[J].测绘科学,2015,40(9):163-166.
[11]周海龙,周强,潘素霞,等.地面三维激光扫描测量技术在农村集体土地使用权调查中的应用研究[J].测绘技术装备,2013,15(4):32-34.
[12]史华林.无人机航测系统在公路带状地形测量中的应用[J].测绘通报,2014(6):60-62.
[13]陈鹏飞,胡海峰,廉旭刚,等.后差分技术及像控点密度对无人机摄影测量精度影响研究[J].测绘通报,2017(11):144-147.
[14]闫利,曹亮,陈长军,等.车载全景影像与激光点云数据配准方法研究[J].测绘通报,2015(3):32-36.
[15]宁晓斐.双目立体视觉中半全局立体匹配算法的研究[D].沈阳:辽宁大学,2014.
引用本文:方留杨,杨成,杨涛,王开洋.高山峡谷区带状地形图空地一体化测绘方法研究[J].人民长江,2019,50(1):130-135.
Research on aerial -ground integrated strip topographic surveying method in mountain valley area
FANG Liuyang1, YANG Cheng2, YANG Tao2, WANG Kaiyang1, 3
(1.National Engineering Laboratory for Surface Transportation Weather Impacts Prevention, Yunnan Broadvision Engineering Consultants, Kunming 650041, China;
2. Xingda Municipal Transportation Construction Investment Corporation, Dali 671000, China;3. Institute of Geology and Geophysics, Chinese Academy of Sciences, Beijing 100029, China)
Abstract: A new aerial-ground integrated long-distance strip topographic surveying method, based on UAV oblique photogrammetry and vehicle laser scanning technique, is put forward to solve the problem of insufficient accuracy of long-distance strip topographic map of UAV surveying in alpine and canyon area. First, three main problems in UAV surveying for strip topographic map in alpine and canyon area were summarized, including insufficient control points and uneven distribution, inadaptation of traditional aerial triangulation method to oblique photography, difficulty of UAV point cloud non-terrain noise filtering. The corresponding solutions were proposed respectively. Then, based on these solutions, a complete strip topographic surveying method in mountain valley area was proposed. The experimental results show that the bandwidth of the strip topographic map can be guaranteed by UAV oblique photogrammetry. Moreover, the accuracy of the topographic map is further improved by introducing the vehicle laser scanning technique and could meet the demand of generating large scale topographic map for engineering project.
Key words:UAV oblique photogrammetry; vehicle laser scanning; long-distance strip topographic map survey; mountain valley area; aerial-ground integration
