基于3S传感信号分析的小空间搬运车系统及三维模型设计研究
2019-09-10姜淑凤周子业刘铭刘宏发
姜淑凤 周子业 刘铭 刘宏发



摘 要:为了解决复杂搬运环境下的自动搬运问题,本文设计了一个基于单片机的小空间搬运车智能防盗、防撞、自动巡航系统,通过超声波及红外检测技术,GSM传输技术,3S传感导航技术,三维数字化装配技术,实时检测车辆与车体生存空间的关系。该搬运车搬运载体采用轮式二级升降,托运托举及稳定上扶的机械手结构因此系统自动化程度高,搬运环境适应性好,有较高的应用价值。
关键词:3S传感;模块集成;2级搬运;自动避撞巡航系统
中图分类号:TP391.9 文献标识码:A 文章编号:2096-6903(2019)05-0000-00
0 引言
遥感技术、定位技术、地理信息技术这三种技术的集合统称为3S技术。该技术的应用不仅对地面建设有重要价值,而且还在其他方面有着重要意义。其核心技术是通过各种传感器采集波信号,根据获得信号进行空间数据分析,从而掌握被测空间及地表信息然后用于各类控制系统进行环境识别与导航。基于该项技术本文设计了一个基于单片机的小空间搬运车智能防盗、防撞、自动巡航系统的二级升降搬运车。
1 3S空间识别模型的建立
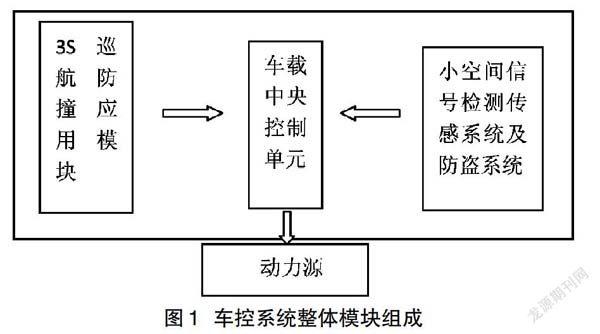
本课题设计是基于超声波测距技术、红外线检测技术及GSM传输技术来实现的。超声波技术主要用于计算发送和接收声波之间的时间差,用软硬件结合的方法实时检测车辆与异物的距离以提醒车主防止碰撞。红外检测和震动检测,是对车辆布防一个可行且可靠的防盗系统。利用GSM模块的通讯协议,可将小车获得的空间采样信息传输给主控机,同时主控机(用户手机)利用3S导航系统指挥车载系统的巡航避撞以此来实现自动控制运动,其设计流程如图1所示。
本系统具有自动巡航,自动避撞,自动检测等功能且系统电路设计简洁、显示直观、实用性强、制作成本低、易于安装,也容易进行外部扩展。
2 控制过程
防撞巡航功能的实现主要是靠超声波及单片机完成的。其具体表现为利用超声波测量前车及其余障碍物的距离通过单片机输出报警信号,或者接入手机导航控制系统,遇到危险时实行安全远程控制从而实现防撞巡航功能。智能运动及防盗功能是通过红外传感器和震动传感器实现的,当红外传感器和震动传感器感应到不安全信息时会发出声光及报警信号,然后通过信息模块发送报警信息到车主,从而实现智能运动及防盗功能。
2.1 软件控制设计步骤
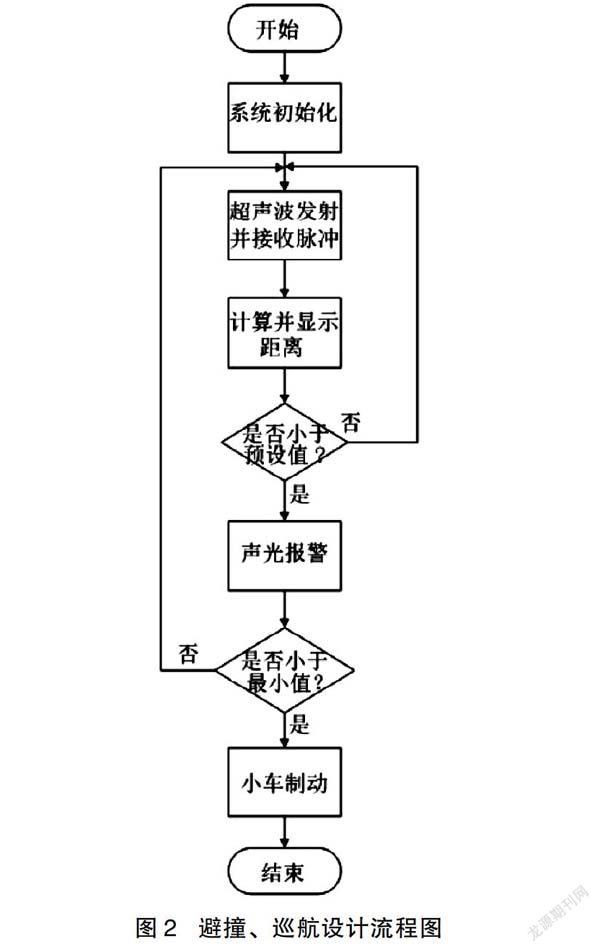
本系统防撞巡航功能设计流程如图2所示,其具体设计过程为:(1)系统初始化设计、(2)通过超声波传感器检测周围环境,判断是否离开“安全工作空间”并将结果以脉冲信号的形式反馈显示在显示屏上,如检测工作空间的可疑相撞物间距小于预设值时进行声光报警,报警后进行车与被撞物之间的最小距离判断,如距离小于最小预设值,则制动并进行转弯过程判断、(3)如大于最小预设值则返回脉冲发射和检测反馈信号的判断流程。在该设计流程中主要用到的元器件有HC-SR501红外检测模块,震动模块SW-420常闭型,传输模块SIM800A GSM,LED发光二极管等。
2.2 硬件模块设计
本研究采用理论分析、控制流程设定、硬件选型、三维仿真的技术设计路线。在技术路线的实施过程中,理论分析采用模块化面向对象的设计方法,在此基础上结合实验室控制芯片的编程数据,研究控制流程于参数设定工作。该系统的应用模块化设计提高了系统的扩展可移植性。
进行对比扩展应用技术的预期分析,通过使用精度更高的传感器,使测量误差更低,反应更灵敏,为后续研究提供了广阔空间。是该设计的信号传输预警与环境信号采集反馈系统如图3所示。
通讯模块与防撞防盗工作模块按照控制流程向中央控制单元申请中断控制。例如:当导航与巡航避撞系统检测到车辆与前方异物距离为50cm时即触发预警模块,绿色和黄色指示灯灯亮,蜂鸣器间断响起如图4所示。,此时执行声光报警动作,同时通过GSM传输模块进行手机接收报警短信并接通导航系统实现自动巡航避撞。
经多次实验对比后,本设计采用SIM800A控制系統芯片,如图5所示。
2.3 创新点
本设计是一个基于51单片机的汽车防盗防撞报警系统,其以单片机为控制核心,通过处理超声波测距传感器返回的信号,实时显示车辆与异物的距离以实现汽车的防撞功能。当车辆停止时可打开防盗装置,检测到有人接近并触碰车辆时会进行声光报警动作并及时发送信号提醒车主。本设计的创新点为:
(1)利用3S应用技术的传感器与可编程芯片的工作原理、超声波测距技术原理、红外检测原理和超声波传感器、电磁波感器工作原理进行系统设计方案,并对测距系统的控制参数进行分析。
(2)完成防撞防盗系统的硬件选型和三维模型设计、完成控制电路设计。
(3)完成防撞防盗系统的工作流程,进行软件控制流程设计。
(4)通过传感器和通讯技术实现实物间导航通讯。
3 三维模型设计
考虑到小空间复杂搬运环境的限制,因此对停车和搬运车的运行都有严格要求。该设计的机械结构采用插入后举升托运货物的搬运架形式,通过设计上扶机械手抓用于固定货物。车体采用轮式2级行走结构设计,当行走路宽时采用轮胎行走,当空间低于轮胎行走要求时,利用第2级支架举升车体后采用小轮行走,该结构环境适应性强,设计优势明显,其设计如图6所示。
4 结语
该系统的设计是通过建立人工智能技术及三维仿真技术的实验模型,利用单片机中央控制和基于3S技术的现代传感器实现的,该系统可实现车与障碍物之间的距离检测及防盗报警,其中涉及到mcs-51单片机的系统应用,传感器检测模块,GSM网络模块,声光报警和LED数码管的距离显示等功能。本文设计了一个智能小空间搬运机械类的小车防盗防撞车载安全巡航报警系统并进行了三维仿真研究。结果表明:该技术不仅可用于车辆自动控制,还可用于小件物品的复杂空间搬运且该技术具有成本低,应用价值高的特点。
參考文献
[1] 沈姝君.ARDUINO系统多功能智能物流搬运车的设计[J].设备管理与维修,2019(06):92-94.
[2] 张莹.3S集成时空信息技术在车辆导航与车辆监控系统中的综合应用[A].中国智能交通协会.第十二届中国智能交通年会大会论文集[C].中国智能交通协会:中国智能交通协会,2017:7.
[3] 赵开国.超声波汽车防撞预警系统的探索研究[J].山东工业技术,2017(10):262.
[4] 郑大波,2.温艳.基于超声波传感器的汽车防撞系统研究[J/OL].电子世界[2019-07-02].https://doi.org/10.19353/j.cnki.dzsj.20190630.003.
[5] 孙世菊.单片机控制的超声波测距仪汽车倒车系统研究[J].时代汽车,2016(05):24-25.
[6] 于明玖.搬运车设计[J].设计,2018(19):8.
[7]李奎,陈振汉,王志安,耿传辉.智能物流搬运车设计探究[J].广东蚕业,2019,53(01):31-32.
[8] 张强,魏占胜,杨李洋,付越.基于CATIA立体环形汽车停车场三维模型设计[J].河北农机,2019(02):49-50.
[9] 李学忠,刘海岷,赵险峰.基于逆向工程的汽车模型三维造型设计[J].农业装备与车辆工程,2007(03):38-39.
收稿日期:2019-05-24
基金项目:大学生创新创业项目(201910232047);齐齐哈尔大学研究生教育改革项目(JGXM-QUG-2018013);齐齐哈尔市科技局入库项目(GYGG-201912);齐齐哈尔大学教学科研项目(YB201825)
作者简介:姜淑凤(1979—),女,黑龙江齐齐哈尔人,博士研究生,副教授,硕士生导师,研究方向:机械电子工程技术及逆向工程技术;周子业(1996—),女,黑龙江齐齐哈尔人,在读硕士研究生,研究方向:工业设计工程、逆向工程应用及木材检测技术;*通讯作者:刘铭(1998—),男,黑龙江五大连池人,学士学位在读,研究方向:机械设计及其自动化。
Research on Small Space Pallet System and 3D Model Design Based on 3S Sensing Signal Analysis
JIANG Shu-feng ,ZHOU Zi-ye,LIU Ming,LIU Hong-fa
(1.School of Mechatronics Engineering,Qiqihar University,Qiqihar Heilongjiang 161001;2.School of Mechanical and Electrical Engineering,Northeast Forestry University,Harbin Heilongjiang 150040)
Abstract: In order to solve the problem of automatic handling in complex handling environment, this paper designs a smart space anti-theft, anti-collision and automatic cruise system based on single-chip microcomputer. It adopts ultrasonic and infrared detection technology, GSM transmission technology and 3S sensing navigation technology. , three-dimensional digital assembly technology, real-time detection of the relationship between the vehicle and the living space of the vehicle body. The handling carrier of the truck adopts the wheeled two-stage lifting, the supporting lifting and the stable manipulator structure, so the system has high degree of automation, the handling environment is adaptable, and has high application value.
Keywords: 3S sensing; module integration; level 2 handling; automatic collision avoidance cruise system
