水陆两栖潜水探险车设计与开发
2019-09-10粟子恒宋磊宪刘海曹维杰丁树凯陈兴红
粟子恒 宋磊宪 刘海 曹维杰 丁树凯 陈兴红
摘 要:目前,市场上许多水下探测设备是针对海洋环境进行研发的,体积大、携带运输不方便,不适合在浅水流域使用。而且,水下救援时,随着深度的增加,水下的情况也会越复杂,会对搜救人员的人身安全造成极大威胁。此外,由于技术和经费等原因,国产水下机器人大多属于实验阶段,没有成型的商业化产品。基于此,本文设计开发了水陆两栖潜水探险车,以弥补市场空白。
关键词:水陆两栖探险车;行驶系统;潜水仓结构;控制系统
中图分类号:U674.78文献标识码:A文章编号:1003-5168(2019)11-0095-03
Abstract: At present, many underwater detection equipments on the market are developed for the marine environment. They are not suitable for shallow water because of their large volume and inconvenience in carrying and transporting. Moreover, with the increase of depth in underwater rescue, the underwater situation will become more complex, which will pose a great threat to the personal safety of search and rescue personnel. In addition, due to technical and financial reasons, most of the domestic underwater vehicles belong to the experimental stage, and there are no commercialized products. Therefore, this paper designed and developed amphibious diving vehicle to make up for the market gap.
Keywords: amphibious exploration vehicle;driving system;submersible structure;control system
目前,市面上的搜救设备种类繁多,但由于价格高和应用环境受限,应用并不广泛,只在一些特定部门或者特定的搜救探险场合使用。此外,由于技术和经费等原因,国产水下机器人大多属于实验阶段,没有成型的商业化产品[1]。为此,本文设计了水陆两栖潜水探险车。
1 总体方案设计
1.1 设计理论
本课题制作的水陆两栖潜水探险车采用铝合金车身,合成橡胶履带底板结构;通过防水电机驱动履带转动使车辆进退,通过减速电机带动潜水膜的伸缩来使车辆达到潜浮的要求;运用水下摄像头与手机进行数据连接,实时进行水下传输。
1.2 设计流程
本文根据潜水仓原理及陆地行驶原理确定车辆模型;用铝合金车身和橡胶履带制作车架;采用亚克力板的热成型工艺制作潜水仓,在内部安装电气设备;完善车辆防水性能和车身配重的调试;通过水下和陆地两种环境的试验小车进行数据采集工作。
2 车辆行驶系统设计
2.1 陆地行驶系统
本车底盘由橡胶履带、驱动轮、导向轮、承重轮和防水电机等组成。减速电机提供驱动转矩带动驱动齿轮转动。此时,驱动轮齿轮和履带啮合,与地面接触的履带给地面一个向后的作用力,地面给履带一个向前的反作用力。当驱动力克服车辆的行进阻力时,履带在承重轮表面向前滑动,车辆行驶。
2.2 水下航行系统
车辆在水下航行的工作原理是:履带在水中通过做圆周运动的形式来产生驱动力。履带划水原理[2]如图1所示。上履带带动翼子板间水道A区内水流向前运动,导向水栅产生的水流冲击力以及D区、下履带和B区划水产生的反作用力共同组成对车的推进力[2]。在履带的上部以及前后两处安装扰流板和挡水罩,减小上履带在水中产生的反作用力和水流冲击力。
3 车辆潜水仓结构设计
3.1 潜浮原理
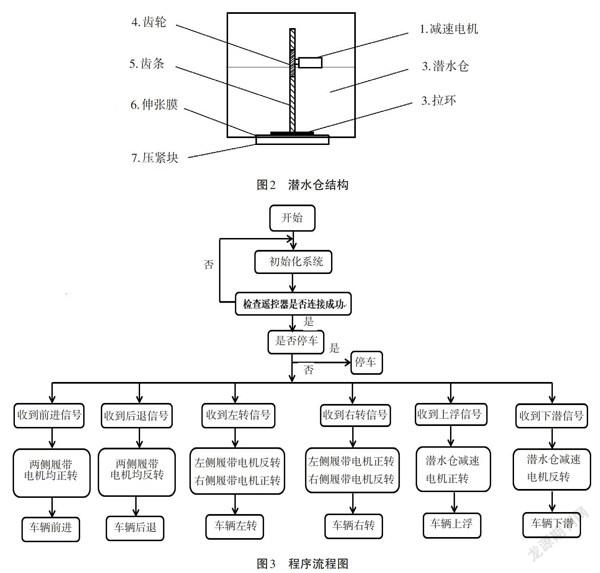
本车潜水仓依据阿基米德原理进行设计,通过仓内的减速电机控制伸张膜的收缩和拉伸,使其在水中的浮力发生变化,从而实现车辆下潜上浮。潜水仓结构如图2所示。下潜过程中,水压增大,减速电机通过齿轮与齿条的结合带动伸张膜上拉使伸张膜收缩,仓内空间变小,气压变大,以抵消水压的作用,车辆下潜;上浮过程中,水压减小,减速电机通过齿轮与齿条的结合来向下推动伸张膜,仓内空间变大,气压变小,车辆上浮。
3.2 潜水仓的结构设计
本车的潜水仓由亚克力板热成型的长方体舱室和伸张膜压紧块组成。亚克力板平均达洛氏硬度值89度左右,能承受水下压力。潜水仓和车体之间通过螺栓进行刚性连接,使用树脂进行密封防水。电源线和控制线缆等通过舱体上的O型孔与舱内的单片机进行连接。控制线缆穿出密封舱后,连接地面遥控器并传输视频信号和控制信号[3]。
4 车辆控制系统设计
本車辆选用ARM-STM32F103ZET6开发板作为整车的控制模块;驱动模块采用L298N稳压驱动板,使用WiFi图像传输模块对摄像系统进行控制;PS2遥控模块控制车辆两侧履带的转速;采用12V锂电池作为电源,可以为不同工作模块提供不同的工作电压。
4.1 PS2遥控模块
PS2遥控模块无线频率为2.4G/Hz,L298N稳压驱动板输出5V电压给开发板供电。驱动板输出三组信号,其中两组信号控制履带电机的转动方向和转速,以此控制车辆的前进后退和差速转向;一组控制潜水仓电机,带动伸张膜进行上下运动。控制程序流程图如图3所示。
4.2 水下WiFi图像传输模块
本车图像传输模块由1 080P高清有线防水摄像头和自带电源系统的WiFi模块组成,具有体积小、画质清晰、信号覆盖面广、数据传输效率高等特点。
5 结语
本文简述了一款水陆两栖潜水探险车的设计思路与开发方案。该车根据履带车辆与潜水艇各自的技术优点来设计,能满足陆地和水下两种不同救援现场对搜救设备的要求。小车实物如图4所示。
经过初步试验,该车可以满足实际的使用需求。该车可以根据不同的工作需求来添加各类救援设备,适用范围更广。
参考文献:
[1]韦荣伟.水下机器人发展趋势及前景[J].现代制造技术与装备,2018(2):175-176.
[2]赵克强,刘淑艳,韩占忠.履带划水推进机理的模型模拟试验研究[J].兵工学报(坦克装甲车与发动机分册),1991(4):59-62.
[3]裴国栋,卞则武,温亚楠.便携式水下机器人设计[J].船电技术,2019(1):14-16.
