无人机低空摄影测量技术在大比例尺地形图测量中的应用
2019-09-10王水清
王水清

摘 要:当今,无人机低空摄影测量技术日趋成熟,在地形图测量中的应用非常广泛。由此,本文着重介绍无人机低空摄影测量技术在1∶1 000地形图成图的流程、要点及最终成果精度评价,以供同行业人士参考。
关键词:无人机;低空摄影测量;大比例尺;地形图
中图分类号:P231.5 文献标识码:A 文章编号:1003-5168(2019)17-0017-06
Abstract: Nowadays UAV low-altitude photogrammetry technology is increasingly mature, and it is widely used in the field of topographic map measurement. This paper mainly introduced the whole process, key points and accuracy evaluation of the final result of uav low-altitude photogrammetry technology in 1∶1 000 topographic map mapping, so as to provide reference for people in the same industry.
Keywords: UAV;low altitude photogrammetry;large scale;topographic map
無人机低空摄影测量克服了传统航空摄影测量审批手续多、造价高、技术难点多及实施难度大等缺点,具有无需审批或审批手续简单、成本低、数据处理手段技术先进及工作效率高等优点。其是目前野外地理信息数据采集最先进的技术手段之一,是建立各种对象的基础GIS地理信息系统最快捷、高有效的工具,对加快实现智能城市乃至数字中国有着重要的意义。
本文阐述了采用高分辨率遥感影像数据一体化测图系统PixelGrid实施某测区1∶1 000地形图无人机低空摄影测量外业、内业数据处理及成图的流程和要点。
1 无人机低空摄影测量成图要点及流程
1.1 无人机低空摄影测量成图要点
无人机低空摄影测量成图要点共分为三大部分:第一是测图前的准备工作;第二是外业数据采集工作;第三是内业数据处理并形成用户所需要的测绘产品。
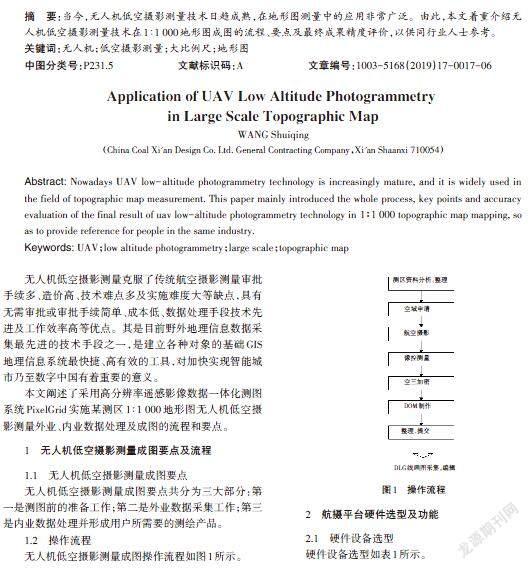
1.2 操作流程
无人机低空摄影测量成图操作流程如图1所示。
2 航摄平台硬件选型及功能
2.1 硬件设备选型
硬件设备选型如表1所示。
2.2 硬件功能
本次采用的是南方天行HQ1300无人机平台,其具有连续飞行时间长、飞行高度在300m以内,且具有适用于阴雨天、自动避开云层、起飞方便等功能;摄影相机具有重量轻、精度高及数据采集速度快等优势;影像处理设备配置高,数据处理速度快。
3 无人机低空航摄测量软件构成及功能
3.1 飞行测量及控制地面工作站
飞行测量及控制地面工作站包括无人机飞行控制及摄影影像采集两大部分。其主要具有以下几方面功能。①具有进行测区查询、确定最优航线、飞行参数预置、质量检查、数据预处理等功能。②地面站系统内存至少配备4G,并且安装有超过320G的存储硬盘,可存档大量的摄影和摄像成果。由于配有高性能电池,可连续供电超过4h,能满足外场工作的需要。③能根据全部测区范围、设备硬件功能、项目成品技术要求,设计飞行方向、飞行架次等[1]。
3.2 无人机飞行控制导航系统
本次采用的天行HQ1300型无人机飞控导航系统包含机载飞行控制单元、地面工作站和通信单元等。其主要具有以下几方面功能。①可以适用于自动控制各种无人机稳定飞行,实现无人干预自动导航飞行,具有多任务设备接口,飞行过程中,可根据实际情况在地面站上人工随时更改飞行参数。②此系统具有自动化程度及控制精度高、设备安全性能完善、人机交互界面友好等优点。
4 无人机低空航摄测量要求
4.1 主要技术要求
地面分辨率:优于10cm,满足1∶1 000成图要求;基本航线方向:根据测区范围及当地气候条件确定航线方向;重叠度要求:山地航向重叠一般60%±2%,最小值不能低于55%,旁向重叠一般30%±2%,最小值不能低于20%;航摄范围覆盖:需要覆盖整个范围;航线布设要求:航线平行、间隔相等,并满足航拍重叠要求;航高确定:本项目采用索尼A6000进行航摄,相机焦距为20mm(根据测区高差不同采取不同焦距的相机)[2]。数字航空摄影的地面分辨率取决于飞行高度。航高确定如图2所示。
其中:
(2)
式中:[h]为飞行高度;[f]为镜头焦距;[a]为像元尺寸;[GSD]为地面分辨率。
本次航摄地面分辨率为优于10cm。本次航摄分区,总摄区范围为多个航摄区域。
此外,对航摄相机的质量要求如下。①曝光时间要短,减少像点位移误差。②通过缩小光圈提高基础影像数据的质量。③低感光度。若没有像点位移补偿功能,则快门速度应满足式(3)。④基础影像应避免云影、光斑或人为的斑点、污渍非正常像素,影像有效范围内禁止明显的“颗粒”现象。
[最大曝光时间×飞机地速<1.6×GSD] (3)
对飞行时间的要求如下:①在规定的航摄期限内,选择大气透明度好、对成图影响较小的季节和时间段进行拍摄,尽量避免植被、积雪、云雾、扬尘(沙)等因素的影响;②要提前收集GPS卫星预报资料,尽量选择PDOP值小于3的时间段进行摄影。
對飞行的要求如下:①进入摄区前,要组织飞行和摄影人员进行航线设计的技术讲评;②飞行前要检查设备能否正常工作,核查参数设置是否正确;③航摄时,既要保证具有充足光照,又要避免过大阴影;④为确保设备安全,飞机发动机启动前,严禁打开航摄系统的电源开关;⑤在确保航摄系统初始化、各项设置和状态正常后,无人机方能滑行起飞。
4.2 野外航摄工作组织要求
野外航摄工作组织流程如表2所示。
4.3 飞行控制要求
4.3.1 姿态控制。按照设计的航线,选派技术好、经验丰富的操控手和地面设计人员,保持好飞行姿态,确保各项技术指标符合相关要求[3]。
4.3.2 覆盖控制。每次飞行结束后,要对旁向重叠、范围等元素进行逐一检查,对于不符合要求的产品,必须及时进行补摄或重摄。
4.4 POS(GPS)控制要求
POS(GPS)控制要求如下:①调试设备正常工作;②
保证系统存储设备容量满足项目航摄数据的存储要求;③设置航摄系统中的各项参数;④飞机滑行期间应排除障碍物造成GPS卫星信号失锁的现象;⑤严格按照技术要求控制飞机上升、下降速率,以免造成GPS卫星信号失锁;⑥航摄飞行过程中,应时刻监控系统工作状态,重点避免GPS信号失锁现象及其他突发事件,并做好应急处理。
4.5 补摄与重摄要求
补摄与重摄要求如下:①航摄过程中出现漏摄或影像不满足质量要求的情况必须及时补摄;②数字影像出现大面积反光或局部缺陷(如云、云影等)时,应予补摄;③漏洞补摄必须按原设计航迹进行,对于补摄航线的两端一般应超出漏洞区域外两条基线[4]。
5 外业像控点测量
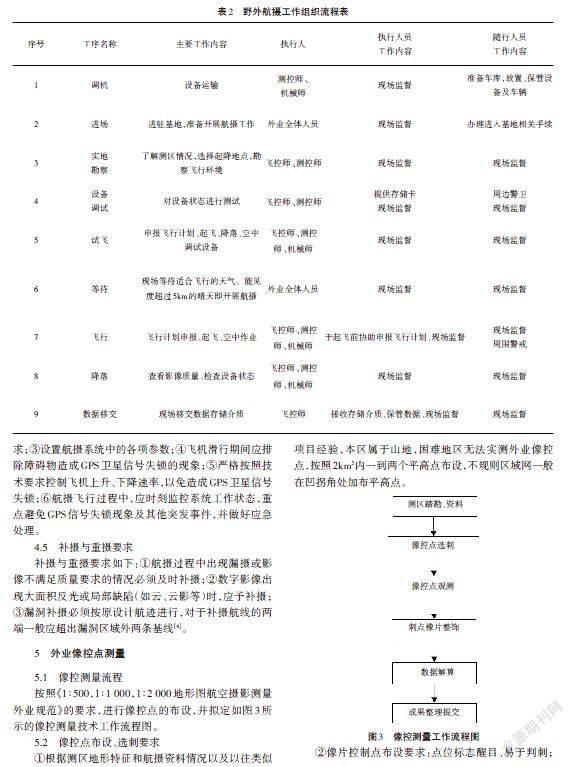
5.1 像控测量流程
按照《1∶500,1∶1 000,1∶2 000地形图航空摄影测量外业规范》的要求,进行像控点的布设,并拟定如图3所示的像控测量技术工作流程图。
5.2 像控点布设、选刺要求
①根据测区地形特征和航摄资料情况以及以往类似项目经验,本区属于山地,困难地区无法实测外业像控点,按照2km2内一到两个平高点布设,不规则区域网一般在凹拐角处加布平高点。
②像片控制点布设要求:点位标志醒目、易于判刺;控制点距像片上各类标志及像片边缘距离大于等于地形图比例尺*0.1mm;控制点应在旁向重叠中线附近,保证接图精度。特殊地区布点:针对没有任何地物特征信息的区域(如荒漠、沙地等区域),在飞行前应布设标志点。同时,对标志点进行实地量测,以保证量测的控制点满足测区进行全数字空中三角测量的要求[5]。
③采用TRK直接对像控点进行控制测量。本次RTK控制测量采用单基站RTK,测量方法如下。
选埋点要求为:点位应设在易于安放仪器、视野开阔的地点;为了避免GPS信号被遮挡或被障碍物吸收,GPS视场周围15°以上不应有遮挡物;点位应尽量避免各种电磁场及高压线对GPS信号的干扰。
同时,利用RTK测量时,其卫星状态应符合《全球定位系统实时动态测量(RTK)技术规范》(CH/T2009-2010)中5.1.6表1要求。
④像控测量质量控制要点。第一,像控点选刺与整饰的质量检查。检查像控点在相片上的位置条件、刺点转刺及整饰是否符合技术要求;检查刺点略图与影像地形是否相符,说明注记是否完整准确清楚。
第二,外业资料检查。检查野外观测手簿是否齐全,观测数据内容是否完整。
第三,网络RTK参数及后续处理数据检查。检查观测参数及观测数据是否剔除了粗差及不可靠数据,检查观测参数是否正确;检查观测数据的正确性,是否剔除了粗差及不可靠数据, 是否检测已知点, 较差是否符合限差要求。
第四,内业成果检查。检查内业成果是否注明平面坐标系统、中央子午线、高程系统、点号、刺点片号、坐标及高程、作业方法、精度等信息,整个测区像控点布点结合图是否齐全。
6 DOM制作
根据无人机航空遥感影像及野外实测像控点资料进行全数字空中三角测量加密计算,通过PixelGrid等软件利用空三加密成果实施测区1∶1 000比例尺DOM数据的过程。
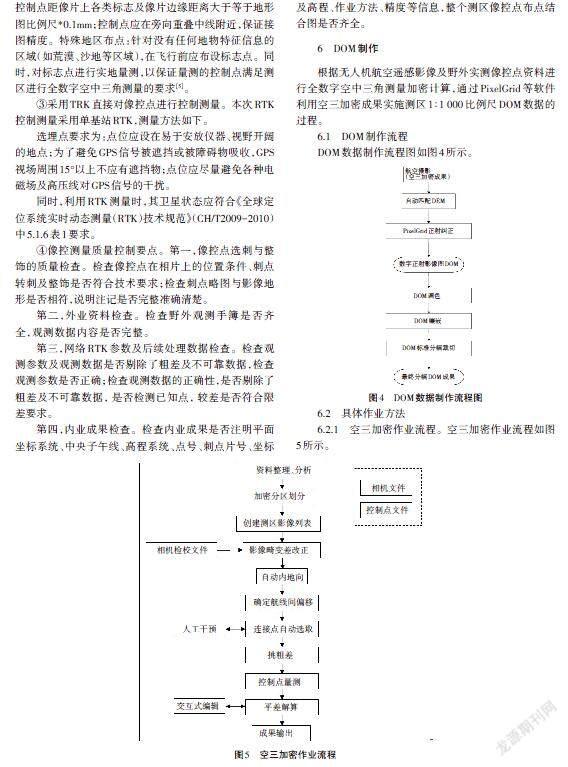
6.1 DOM制作流程
DOM数据制作流程图如图4所示。
6.2 具体作业方法
6.2.1 空三加密作业流程。空三加密作业流程如图5所示。
6.2.2 自动匹配DEM。主要是用PixelGrid生成核线影像、匹配种子点线立体量测、自动影像匹配生成高精度的DSM[6]。内插筛除DSM高于地面的对象(如房屋、树林、高架桥等),得到用于正射纠正的DEM数据。
6.2.3 正射影像纠正。采用单片微分纠正的算法进行纠正,在航摄区较平坦的情况下,采用隔片纠正的方法。
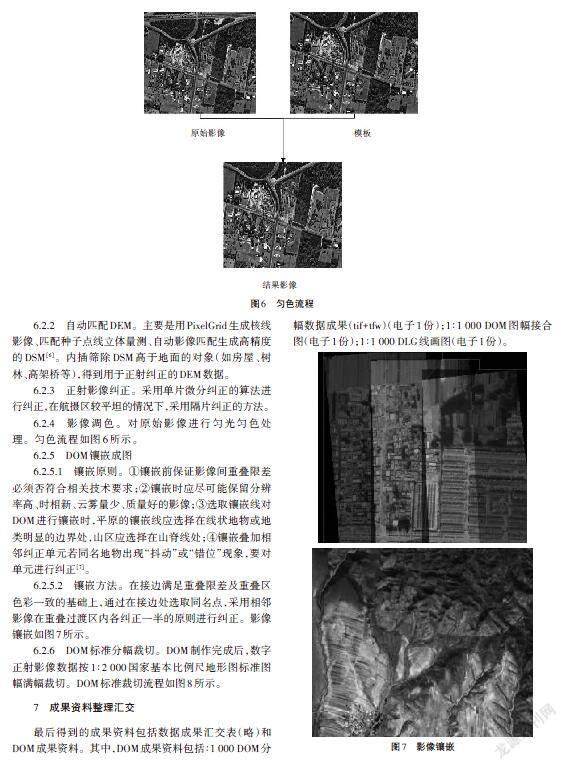
6.2.4 影像调色。对原始影像进行匀光匀色处理。匀色流程如图6所示。
6.2.5 DOM镶嵌成图
6.2.5.1 镶嵌原则。①镶嵌前保证影像间重叠限差必须否符合相关技术要求;②镶嵌时应尽可能保留分辨率高、时相新、云雾量少、质量好的影像;③选取镶嵌线对DOM进行镶嵌时,平原的镶嵌线应选择在线状地物或地类明显的边界处,山区应选择在山脊线处;④镶嵌叠加相邻纠正单元若同名地物出现“抖动”或“错位”现象,要对单元进行纠正[7]。
6.2.5.2 镶嵌方法。在接边满足重叠限差及重叠区色彩一致的基础上,通过在接边处选取同名点,采用相邻影像在重叠过渡区内各纠正一半的原则进行纠正。影像镶嵌如图7所示。
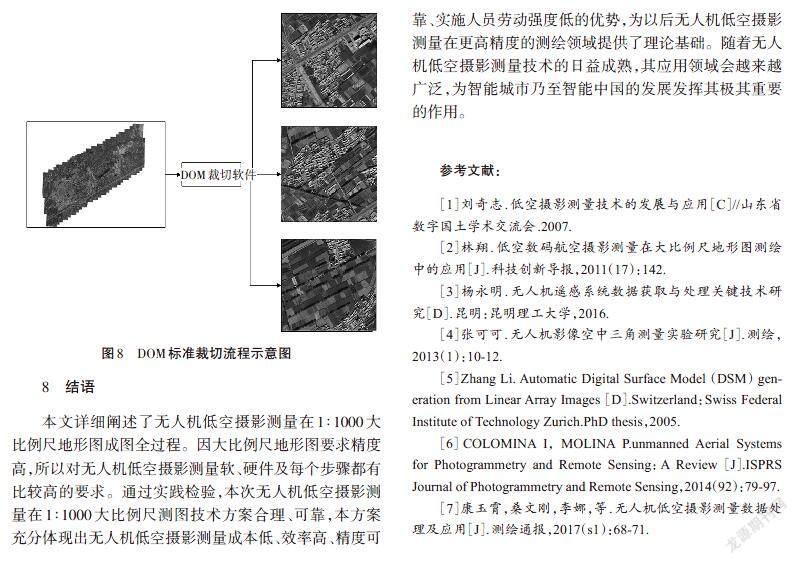
6.2.6 DOM标准分幅裁切。DOM制作完成后,数字正射影像数据按1∶2 000国家基本比例尺地形图标准图幅满幅裁切。DOM标准裁切流程如图8所示。
7 成果资料整理汇交
最后得到的成果资料包括数据成果汇交表(略)和DOM成果资料。其中,DOM成果资料包括∶1 000 DOM分幅数据成果(tif+tfw)(电子1份);1∶1 000 DOM图幅接合图(电子1份);1∶1 000 DLG线画图(电子1份)。
8 结语
本文详细阐述了无人机低空摄影测量在1∶1000大比例尺地形图成图全过程。因大比例尺地形图要求精度高,所以对无人机低空摄影测量软、硬件及每个步骤都有比较高的要求。通过实践检验,本次无人机低空摄影测量在1∶1000大比例尺测图技术方案合理、可靠,本方案充分体现出无人机低空摄影测量成本低、效率高、精度可靠、实施人员劳动强度低的优势,为以后无人机低空摄影测量在更高精度的测绘领域提供了理论基础。随着无人机低空摄影测量技术的日益成熟,其应用领域会越来越广泛,为智能城市乃至智能中国的发展发挥其极其重要的作用。
参考文献:
[1]刘奇志.低空摄影测量技术的发展与应用[C]//山东省数字国土学术交流会.2007.
[2]林翔.低空数码航空摄影测量在大比例尺地形图测绘中的应用[J].科技创新导报,2011(17):142.
[3]杨永明.无人机遥感系统数据获取与处理关键技术研究[D].昆明:昆明理工大学,2016.
[4]张可可.无人机影像空中三角测量实验研究[J].测绘,2013(1):10-12.
[5]Zhang Li. Automatic Digital Surface Model (DSM) generation from Linear Array Images [D].Switzerland:Swiss Federal Institute of Technology Zurich.PhD thesis,2005.
[6]COLOMINA I, MOLINA P.unmanned Aerial Systems for Photogrammetry and Remote Sensing:A Review [J].ISPRS Journal of Photogrammetry and Remote Sensing,2014(92):79-97.
[7]康玉霄,桑文剛,李娜,等.无人机低空摄影测量数据处理及应用[J].测绘通报,2017(s1):68-71.
