动态下电磁阀控对靶喷雾流量特性及控制方法
2019-09-10代祥肖静徐幼林宋海潮
代祥 肖静 徐幼林 宋海潮

摘要:本研究对电磁阀控对靶喷雾系统动态条件(喷头开启数、开启时间、流量大小适时变化)下各参数[系统压力(P)、电磁阀频率(f)、占空比(D)]控制下的喷雾流量(Q)特性进行试验研究,并利用BP神经网络及遗传算法(GA)优化的BP神经网络对试验数据进行拟合和测试。试验结果表明:P每增大0.05MPa,Q的最大调节范围增加约200 ml/ min;较大的P会轻微减小流量控制线性区间(I),而较高的f则显著减小线性区间(I),f=20Hz,P为0.l0~0.35 MPa时对应的I约为0.3~0.6;Q与各控制参数间均存在非线性关系,利用BP神经网络进行喷头精准流量控制误差较小,平均误差仅0.20,经GA优化的BP神经网络具有更高的精度,误差低至0.15。综合考虑系统动态条件下电磁阀各参数可以实现流量的精准调节,依靠BP神经网络,尤其是GA优化的BP神经网络,可实现电磁阀控对靶喷雾流量的精准控制。
关键词:电磁阀控对靶喷雾;动态条件;流量特性;BP神经网络;遗传算法
中图分类号:TP391.41;S220.3
文献标识码:A
文章编号:1000-4440(2019)02-0476-08
精准对靶喷雾具有减少农药浪费,提高农药利用率的优点[1-2]。国内外均对精准的对靶施药方式进行了大量的研究[3-5],其中施药量的精准控制是对靶喷雾的核心要求之一[6,8]。施药量的调节主要依赖3种方式:压力调流式、在线注入式以及电磁阀控制式。压力调流式具有喷雾流量受压力变化影响明显的弊端,且实际的喷雾效果受压力影响较大[9]。在线注入式虽可避免预混及农药剩余,但是存在药水难以精准配比,响应延时及混合不均匀的问题,尚未得到实际应用精准对靶喷雾技术中,采用电磁阀控制的喷雾流量调节方式有着系统相对简洁的优点,是对靶喷雾技术实用化的热点方向[3-14]。吴春笃等[15]对电磁阀控制的变量喷雾系统中的雾滴沉积模型进行了研究,了解了其典型特征。进一步地,邓巍等[16]对该系统的雾化特性、雾滴速度进行了研究;翟长远等[17]对系统中安装的4种喷头的流量特性进行了研究,获得了各喷头流量与压力以及占空比之间的拟合关系;魏新华等[18]设计了喷施控制器,并对其进行了测试,结果表明采用比例溢流阀的控制策略可减轻喷头流量控制不精确的问题,但精准度尚待改进;蒋焕煜等[19]采用卡尔曼滤波的方法经分段线性拟合获得了喷头流量模型;李龙龙等[20]研究了应用高频电磁阀条件下的喷雾特性,指出喷头流量的控制非单因素影响,而是多种影响因素共同作用的结果。总体上,虽然电磁阀控制的变量喷雾实际应用已经取得了较大的进展,在國外甚至已经投入使用[21],但是依然存在电磁阀实际流量控制不十分精确,使得喷雾沉积量与喷雾需求量存在误差。
一般情况下,电磁阀控的对靶喷雾需系统压力稳定,使得喷雾流量及喷雾特性可以被有效控制,但随着精确对靶喷雾技术的发展,要求喷雾系统能根据作物有或无、大或小及各部位病害情况实时调节喷头开启数、喷头开启时间及流量大小进行按需施药,这种各喷头工作状态的实时动态变化不仅会影响喷雾的总流量,也会改变系统压力,从而反过来影响喷杆上各喷头流量,而常规溢流装置难以快速对这种动态的流量及压力变化进行有效调整,因此动态条件下喷头流量控制精确性不足。
为解决动态条件下电磁阀控对靶喷雾机喷雾流量不稳定问题,本研究拟从研究动态条件下的电磁阀控喷雾流量特性着手,根据电磁阀控对靶喷雾机工作过程中所表现出的压力及流量特征确定电磁阀控喷头流量特性试验参数,通过试验分析动态条件下各参数对电磁阀实际流量的影响,然后针对动态条件下影响对靶喷雾流量精确性的关键因素,利用神经网络算法进行动态条件下喷雾流量控制,验证喷雾系统中电磁阀流量精准调节控制的可行性。本研究旨在明确电磁阀控对靶喷雾系统的流量特性,并完善其流量控制策略,以提高喷雾流量实时动态调节的精准度。
1 材料与方法
1.1 电磁阀控对靶喷雾机样机
图1为电磁阀控对靶喷雾机样机,样机包括4组喷杆,每组喷杆上3只喷头。在进行喷头开启数变化条件下的喷雾试验时,电磁阀的开启数由红外传感器是否检测到作物存在决定,试验系统工作过程中,喷头开启数变化所导致的系统压力变化由压力传感器读出,通过该试验可为下一步动态条件下的电磁阀控喷头流量特性试验限定动态压力变化范围。
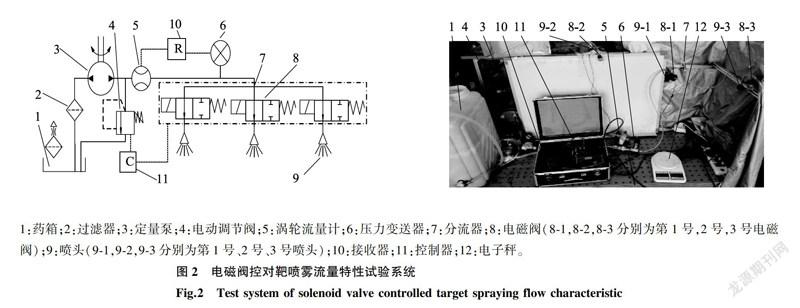
1.2 电磁阀控对靶喷雾流量特性试验系统
为更好地进行喷头开启数、开启时间、喷头流量大小适时动态变化条件下的电磁阀流量试验,在实验室中搭建电磁阀控对靶喷雾流量特性试验系统,选用ZRHP-16C型电动调节阀,通过改变开口度调节流回药箱的流量,大范围调节系统压力,模拟样机中其他3只喷杆上喷头启闭及流量变化给该试验喷杆带来的压力变化。选用LWGY-15型涡轮流量计进行总流量测量,各喷头实际流量采用电子秤称量,选用CYT-101型压力变送器对压力进行检测。压力信号及流量信号均通过基于52单片机的接收器读出并记录。选择Airtac-2W系列直动常闭型高速电磁阀为对靶喷雾控制阀。试验材料特征参数见表1。
药液采用甘油水溶液进行模拟,259C时黏度为0.01Pa·s。定量泵(PLD1206型,4L/min,0.5MPa)将混合液送至喷杆处。由于不同的喷嘴类型,如扇形、圆形喷嘴仅对雾滴的沉积以及雾滴的物理特性影响较大,而对实际流量影响不够显著[17],因此仅选取农业中最常用的平面扇形喷头进行喷雾试验,喷头为ARAG-422SF11005-04M型,额定工作压力为0.4 MPa,流量为2L/min,满足常规喷雾需求。
各电磁阀均通过独立的脉冲输出控制电路进行驱动,通过调节电磁阀的启闭时间,即调节电磁阀脉冲占空比直接实现喷头启闭和开启时间长短的控制,从而实际调节喷雾流量。控制器独立脉冲输出电路如图3所示。MCU(STC89C52RC)实现各路脉冲信号的输出,由DC5V驱动。外电路由DC12V驱动,通过光电耦合实现MCU电路与外电路的隔离,保护最小系统。外电路通过控制MOSFET(IRF840)进而控制电磁阀驱动电路的接通,电磁阀由DC24V驱动。
1.3 试验方法
在电磁阀控对靶喷雾系统中,动态参数主要是系统压力(P),此外还应包括电磁阀操作频率(f)及占空比(D)。由于传统喷雾机中依靠回流调压的方式易造成系统压力调节滞后及不准确,因此未来的电磁阀控喷雾系统可采用计量泵供给实现主动的喷雾总流控制方式,而各电磁阀则适时调节控制参数以满足精准喷雾需求。根据图1样机试验结果中喷头开启数变化导致的喷雾压力波动范围,样机所有喷杆上仅有数只喷头工作时系统压力高达0.35Mpa,而当所有喷头均打开时,由于系统供流不足,系统压力低至0.09Mpa。因此电磁阀控对靶喷雾流量特性试验中动态条件下喷杆压力区间定为0.10~0.35MPa,以模拟样机的工作状态,该喷雾压力范围低压部分不满足正常喷雾需求,但考虑到实际对靶喷雾机出现的极端情况,足以用于研究动态条件下电磁阀控对靶喷雾的流量特性。而在未来实际的对靶喷雾机中系统供流应与所需喷雾量一致。
试验中共3只电磁阀及外接喷头装在同一喷杆上,仅依靠电磁阀的完全启闭难以实现0.10~0.35 MPa的压力调节,因此采用电动调节阀模拟调节样机其他喷杆_上的压力变化,1号、2号电磁阀则用于模拟该喷杆上受喷头开启数、开启时间影响所带来的系统压力变化,同时,当3号电磁阀由于流量改变导致系统压力变化时,通过1号、2号电磁阀进行压力调节,从而满足一定压力条件下3号电磁阀实际流量的测试,即电动调节阀与1号、2号电磁阀二者配合调节系统压力到测试压力(P)点上。试验系统动态压力调节如表2所示。
为了测试3号电磁阀动态条件下的流量特性,控制3号电磁阀实际操作参数f为6Hz、8Hz、10Hz、12Hz、14Hz、16Hz、18Hz、20Hz,D为10%、20%、30%、40%、50%、60%、70%、80%、90%、100%,对该控制参数下3号电磁阀的实际流量进行测量。重复试验,取3号电磁阀流量均值作为特征流量。
2 结果与分析
2.1 动态变化条件下电磁阀流量
将3号电磁阀在同一工作参数下重复试验所得实际流量均值作为该控制参数(Pf、D)下的电磁阀实际流量特征,用以分析实际电磁阀控对靶喷雾中动态变化条件下的流量特性。不同P、f、D条件下电磁阀实际流量Q试验结果如图4所示。定义流量控制线性区间(Linear interval)为:能够采用线性拟合方法将一定P及f条件下的Q与D进行线性拟合的D的区间。因此线性区间越大则意味着能够以线性特征进行流量控制的范围越广,流量调节分辨率越高。
在线性区间内,P不变时,Q可以通过调节D实现较為精确的控制,而在线性区间外Q_D关系则无法用线性区间内的线性关系进行拟合。且当D超出线性区间后,随着D的提高,Q基本不再进一步提高,即电磁阀可视为处于常开状态,Q无法进一步控制。
在任-P条件下,不同的f会影响线性区间的大小。随着f的增加,线性区间均呈现逐渐减小的趋势,如8Hz时,不同P的线性区间均为0.8(0.10~0.90),而在20Hz时,线性区间范围仅为0.30~0.60,这意味着增大f会降低Q控制的精度。与线性区间变化规律不同的是,随着f的改变,Q调节范围并不会产生明显变化。但是不同f下,不同的D所对应的输出流量Q却存在差异。
P变化对Q影响显著,随着P的增大,电磁阀最大流量呈现逐渐增高的趋势,不同f条件下从P=0.10MPa时约600 ml/min逐渐提高到P=0.35 Mpa时的约1700ml/min,可见P变化对电磁阀实际流量影响显著,在试验条件下,P每提高0.05 MPa,Q提高约200ml/min,因此在实际的电磁阀控对靶喷雾系统中,需要考虑P的波动对单喷头实际Q值的影响。
2.2 动态变化条件下电磁阀流量BP神经网络控制
传统电磁阀控制流量的方式是仅调节D实现变量喷雾,但是这种策略因实际工作中动态工作状况的存在,以及常规溢流装置无法实现及时稳压,实际喷雾流量误差较大。由于电磁阀控对靶喷雾中的实际Q与P、D以及f三者间存在非线性关系,因此可综合电磁阀控制参数D、f以及动态条件下的P实现对Q的精准调节。针对非线性问题,需要选取合适的控制方法,BP神经网络曾被用于变量喷雾系统中的供药系统流量的精确控制222,其具有较强的非线性映射能力以及较高的容错能力,因此满足用于验证动态条件下电磁阀控对靶喷雾流量精准控制的条件。
2.2.1 BP神经网络数据输入与模型训练针对电磁阀实际流量的控制,采用3层BP神经网络结构对试验数据进行训练检验。BP神经网络输入量为PD和f,输出量为Q。神经网络的应用中,隐含层节点数的选择需要根据数据拟合的精度来选择,隐含层节点数可表示为:
公式
N为输入层节点数,0为输出层节点数,M为小于10的任意正整数。
因此,该BP神经网络隐含层选择为5个节点,输入层3个节点,输出层1个节点。3层神经网络的表达式可表示为:
公式
式中,X;为输入量,分别代表系统压力(P)、电磁阀占空比(D)以及电磁阀频率(f);y;为隐层输出;i和j分别为输入层和隐层节点个数;Zx为输出量,即电磁阀的实际输出流量;W表示连接权重,C,b表示偏差。
BP神经网络隐含层常采用Sigmoid传输函数,且BP神经网络的输入层到隐含层采用Sigmoid函数的双曲正切Tansig作为传输函数时,比采用对数函数Logsig网络带来的误差小,输出层常采用Purelin函数用于模式识别241。本模型验证中BP神经网络的神经元传递函数采用S型正切函数Tansig,输出层则采用线性函数Purelin作为神经元传递函数。
由于实际流量同电磁阀各控制参数间存在一定范围内的线性关系,因此训练前需对3个动态变量下共480组数据的编号进行随机排序,以减小训练误差,其中80%数据用于模型训练,20%数据用于模型验证。对输入训练样本数据以及测试样本数据均使用Mapminmax函数进行归一化处理以消除量纲影响,提高网络收敛性能。
2.2.2 BP神经网络的遗传算法优化由于采用BP神经网络进行预测容易存在精确性不足的问题,且难以满足实际控制需求[23],因此提出对BP神经网络进行优化,验证进一步提高动态条件下喷雾流量控制精确性的可行性。遗传算法是模拟自然界遗传机制和生物进化论而成的一种并行随机搜索最优化方法。遗传算法应用于BP神经网络的目的是优化其初始权值和阈值,且理论上认为使用优化后的网络[25]预测的精确性更好。
首先进行种群初始化,然后根据个体得到BP神经网络的初始权值和阈值,用训练数据训练BP神经网络后预测系统输出。预测输出和期望的输出之间的误差绝对值之和作为个体适应度值F,计算公式为:
公式
式中,abs为绝对值函数;n为网络输出节点数;y;为BP神经网络第i个节点的期望输出,0;为第i个节点的实际输出;k为系数。
选择轮盘赌法进行遗传算法选择操作,即基于适应度比例的选择策略,每个个体i的选择概率P为:
公式
式中,N为种群个体数目;m为系数。
采用实数交叉法进行交叉操作,第k个染色体ap和第l个染色体a,在交叉位j的操作可写为:
公式
变异操作:
公式
式中,r2是一个随机数;g为当前迭代次数;G'max是最大的进化次数;本试验中取最大迭代次数为10次。r为[0,1]间的随机数。
2.2.3 基于神经网络的电磁阀流量控制模型测试及结果分析采用BP神经网络以及遗传算法优化的BP神经网络训练结果如图5所示。图5A为BP网格训练性能,均方误差收敛于0.0086507,收敛良好;图5B显示优化算法训练的均方误差收敛于0.0068377,稍优于BP神经网络算法。图6A,图6B显示两算法均具有较高的拟合准确性。
使用神经网络进行模型的预测存在着误差,误差的大小说明了使用该模型进行流量控制的精确性。使用平均误差比例E,衡量这一指标。
公式
式中n为测试样本数,QR为电磁阀实际流量输出,Q,为神经网络理论输出。BP神经网络控制误差为0.183,遗传算法优化的BP神经网络算法控制误差为0.151,2种控制方法误差在可接受范围内,均具有较高精度。部分存在较大误差的数据是由于试验精度导致的,未来通过使用更为精密的喷雾控制设备,可以达到更高的喷雾流量控制精度。
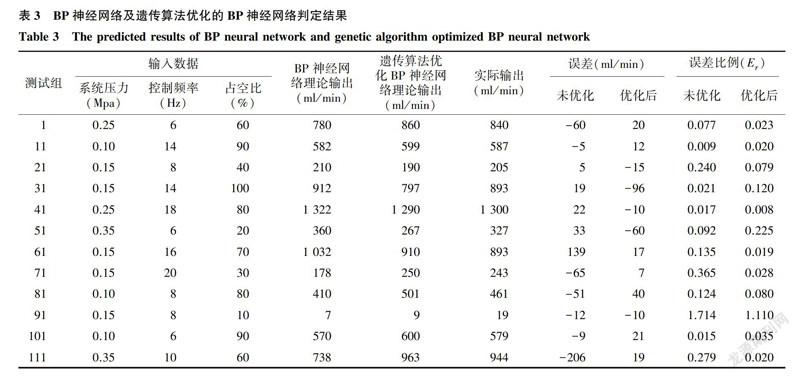
表3给出了部分采用BP神经网络及遗传算法优化的BP神经网络验证样本测试结果。可见优化的BP神经网络具有更高的精度,只有极个别低流量数据存在较大误差。
因此,依靠神经网络进行动态条件下电磁阀流量的精准控制可行,且采用遗传算法优化的BP神经网络模型能够达到更高的控制精度,能够应用于动态下喷杆上各电磁阀实际流量的有效控制。试验结果中存在的误差未来可随着试验数据量的加大,元件精度的提升得到进一步解决。
3 结论
本研究针对电磁阀控对靶喷雾机实际作业中在动态条件下喷雾流量控制不精确的问题,研究了电磁阀控对靶喷雾流量特性,并提出采用BP神经网络,将P,D以及f同时作为控制参数进行动态条件下的精准Q控制的策略。试验结果表明,线性区间(I)内依靠调节D可以实现Q较为精准的调节;f主要影响I大小,随着f的升高,1收窄,基于D进行Q调节的精度下降,P及D不变时调节f也可以实现对Q的调节。
P对Q调节范围影响显著,试验条件下P每增大0.05MPa,Q的最大调节范围增加约200ml/min。因此,考虑到对靶喷雾机动态工作时P存在变化,且常规溢流装置对P的稳定效果欠缺,在电磁阀控对靶喷雾系统实际应用中,要解决动态条件下精准流量控制问题,P应该作为电磁阀控对靶喷雾流量控制参数之一,以实现对实际喷雾流量的进一步精准控制。
验证结果表明基于BP神经网络的流量控制模型能够精准地进行动态条件下电磁阀流量的控制,BP神经网络预测误差比例(E)在0.2以内,遗传算法进行优化的BP神经网络控制算法相比单纯BP神经网络具有更高的控制精度(E)达到0.15。实际动态条件下,在电磁阀控对靶喷雾流量控制中,除了将D作为控制参数以外,通过将P以及f同时作为控制参数,可以进行喷头开启数、开启时间、流量大小适时变化条件下喷杆上各电磁阀实际流量的有效控制,从而解决动态条件下电磁阀控对靶喷雾流量的精准控制问题。
参考文献:
[1]邱白晶,闫润,马靖,等.变量喷雾技术研究进展分析[J].农业机械学报,2015,46(3):59-72.
[2]薛新宇,兰玉彬.美国农业航空技术现状和发展趋势分析[J].农业机械学报,2013,44(5):194-201.
[3]鄭加强,周宏平,徐幼林,等.农药精确对靶施用及其系统设计[J].农业工程学报,2005,21(11):67-72.
[4]张美娜,吕晓兰,雷哓晖.可移植的对靶喷雾控制系统设计与试验[J].江苏农业学报,2017,33(5):1182-1187.
[5]ZHU H,OZKAN H E,BRAZEE R D,et al.A system to determine lag time and mixture uniformity for inline injection sprayers[J].Applied Engineering in Agriculture,1998,14(2):103-110.
[6]LUCK J D,SHEARERS,LUCK B D,et al.Recalibration methodology to compensate for changing fluid properties in an individualnozzle direct injection system[J].Transactions of the ASABE,2016,59(3):847-859.
[7]VONDRICKA J,LAMMERS P s.Evaluation of a carrier control valve for a direct nozzle injection system[J].Biosystems Engineering,2009,103(1):43-48.
[8]邹凡,肖茂华,傅秀清,等.新型南方水田喷杆喷雾机液压系统的设计与分析[J].江苏农业学报,2018,34(1):220-224.
[9]邓巍,何雄奎,丁为民.基于压力变量喷雾的雾化特性及其比较[J].江苏大学学报(自然科学版),2009,30(6):545-548.
[10]ZHU H,0ZKAN H E,FOX R D,et al.Mixture uniformity in supply lines and spray patterns of a laboratory injection sprayer[J].Transactions of the ASAE,1998,14(3):223-230.
[1]VONDRICKA J,LAMMERS P s.Evaluation of a carrier control valve for a direct nozzle injection system[J].Biosystems Engineer-ing,2009,103(1):43-48.
[12]HLOBEN P.Study on the response time of direct injection systems for variable rate application of herbicides[D].Bonn:University of Bonn,2007.
[13]CHEN Y,ZHU H,0ZKAN H E.Development of a variable-rate sprayer with laser scanning sensor to synchronize spray outputs to tree structures[J].Transactions of the ASABE,2012,55(3):773-781.
[14]LIU H,ZHU H,SHEN Y,et al.Development of digital flow control system for multi-channel variable-rate sprayers[J].Transactions of the ASABE,2014,57(1):273-281.
[15]吴春笃,杜彦生,张伟,等.脉宽调制型变量喷雾系统雾量沉积分布[J].农业机械学报,2007,38(12):70-73.
[16]邓巍,丁为民.基于PWM技术的连续式变量喷雾装置设计与特性分析[J].农业机械学报,2008,39(6):77-80.
[17]翟长远,王秀,密雅荣,等.PWM变量喷雾喷头流量模型[J].农业机械学报,2012,43(4):40-44.
[18]魏新华,蒋杉,孙宏伟,等.PWM间歇喷雾式变量喷施控制器设计与测试[J].农业机械学报,2012,43(12):87-93.
[19]蒋焕煜,周鸣川,童俊华,等.基于卡尔曼滤波的PWM变量喷雾控制研究[J].农业机械学报,2014,45(10):60-65.
[20]李龙龙,何雄奎,宋坚利,等.基于高频电磁阀的脉宽调制变量喷头喷雾特性[J].农业工程学报,2016,32(1):97-103.
[21]SHEN Y,ZHU H.Embedded computer controlled premixing in-line injection system for air-assisted variable-rate sprayers[J].Transactions of the ASABE,2015,58(1):39-46.
[22]張敏,范龙,代祥,等.基于BP神经网络的变量喷雾供药系统研究[J].林业工程学报,2017,2(2):133-137.
[23]李晋阳,贾卫东,魏新华.基于流量调节阀和神经网络的植保机械在线混药装置[J].农业机械学报,2014,45(11):98-103.
[24]蒲春,孙政顺,赵世敏.Matlab神经网络工具箱BP算法比较[J].计算机仿真,2006,23(5):142-144.
[25]田亮,罗宇,王阳.基于遗传算法优化BP神经网络的TIG焊缝尺寸预测模型[J].上海交通大学学报(自然科学版),2013,47(11):1690-1696.
