轴对称推力矢量控制伺服机构空间运动解耦研究*
2019-09-09张新华段小帅肖中卓霍希建
刘 海,张新华,段小帅,肖中卓,周 围,霍希建
(北京自动化控制设备研究所·北京·100074)
0 引 言
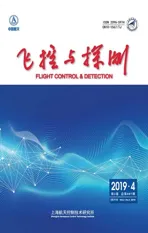
推力矢量控制(Thrust Vector Control, TVC)技术[1-4]是一种按照产生控制力和控制力矩的方式定义的航天器飞行控制方式,它通过改变发动机尾喷流方向来控制飞行器的飞行方向和姿态角的变化,使飞行器具有更高的机动性和敏捷性。轴对称推力矢量控制系统主要由2个90°分布的机电伺服机构和控制器组成[5-7],如图1所示。其最大的特点是两个执行机构需要协同运动才能够使得喷管满足摆动角度的需求。当两个伺服机构的下支点与喷管的下支点不在同一平面时,两伺服机构的位移会产生牵连耦合[8]。以往,矢量喷管姿态与推力矢量伺服机构的运动规律间的关系往往通过平面投影几何计算,建模困难[9]。本文提出了一种利用欧拉角描述喷管姿态、通过空间齐次坐标变换矩阵原理对两路喷管伺服机构进行空间位移计算的空间解耦计算方法。
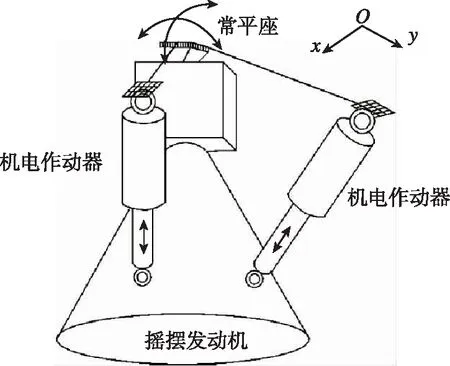
图1 喷管轴对称推力矢量控制系统Fig.1 Symmetrical thrust vector control system of nozzle
1 理论建模分析
1.1 空间欧拉角描述
欧拉角的物理概念直观,特别适合于描述物体的空间姿态。欧拉角的示意图如图2所示,做定点转动的物体有三个自由度,对应的三次任意有限转动均可描述物体在固定坐标系下的空间姿态。设固定坐标系为OXYZ,随动坐标系为oxyz。初始时,两坐标系重合,OXYZ坐标系先绕Z轴转动ψ角得到ox0y0z0,再绕x0转动角θ得到ox1y1z1,最后绕z1转动角φ得到oxyz。上述三次转动均为相对坐标变换,相互独立,任一次的转动都不影响其他转动的值。欧拉角可表示为(ψ,θ,φ)。
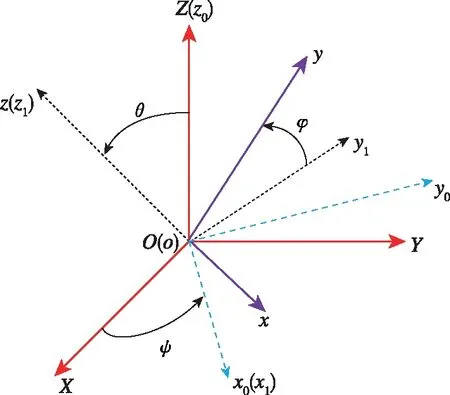
图2 欧拉角示意图Fig.2 Euler angle diagram
将欧拉角以方向余弦矩阵表示为
A=AψAθAφ
(1)
式(1)中,Aψ为OXYZ到ox0y0z0的变换余弦矩阵;Aθ为ox0y0z0到ox1y1z1的变换余弦矩阵;Aφ为ox1y1z1到oxyz的变换余弦矩阵。
1.2 轴对称推力矢量控制伺服机构空间模型建立
轴对称推力矢量控制伺服机构的布局如图3所示。在描述喷管的运动学特征时,首先确定了整体系统是一个二自由度结构,并且只发生旋转且不会发生自旋,很适合用欧拉角来描述[10]。在飞行器上建立固定坐标系OXYZ,在喷管与地面铰接点建立随动坐标系oxyz。初始时,两个坐标系重合。单喷管的三维姿态参数包括θ、φ,其定义分别如下:θ为目标中轴线与固定坐标系水平面OXY的夹角;φ为目标中轴线在固定坐标系水平面OXY上的投影与OX轴正方向之间的夹角。采用欧拉角描述摆动喷管的姿态,欧拉角为(φ,θ,-φ)。
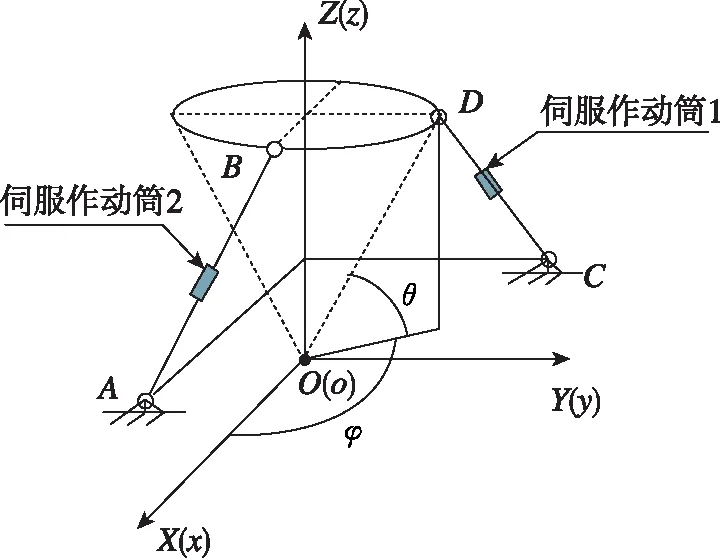
图3 轴对称推力矢量控制伺服机构的布局Fig.3 Axisymmetric thrust vector control servomechanism layout
由固定坐标系OXYZ变换到喷管上随动坐标顺序为OXYZ并绕其Z轴转动角φ,得到新坐标系ox0y0z0。ox0y0z0绕其x0轴转动θ角,得到新坐标系ox1y1z1。ox1y1z1绕其z1轴转动-φ角,得到oxyz。由欧拉角转换为方向余弦矩阵,即有
(2)
式(2)中:
A11=cos(φ)cos(-φ)-cos(θ)sin(-φ)sin(φ)
A12=-sin(φ)cos(-φ)-cos(θ)sin(-φ)cos(φ)
A13=sin(θ)sin(-φ)
A21=cos(φ)sin(-φ)+cos(θ)cos(-φ)sin(φ)
A22=-sin(φ)sin(-φ)+cos(θ)cos(-φ)cos(φ)
A23=-sin(θ)cos(-φ)
A31=sin(θ)sin(φ)
A32=sin(θ)cos(φ)
A33=cos(φ)

(3)
1.3 轴对称推力矢量控制伺服机构运动程序计算
A铰点在固定坐标系OXYZ中的坐标为(440, 0, 542),C铰点在固定坐标系OXYZ中的坐标为(0, 440, 542);B铰点在随动坐标系oxyz中的坐标为(436.5, 0, 110),D铰点在随动坐标系oxyz中的坐标为(436.5, 0, 110)。φ的范围为0°~ 360°,θ的范围为0°~ 7°。
伺服机构AB的位移解算结果如表1所示,伺服机构CD的计算结果如表2所示。
计算结果显示,当角φ为0°、角θ由0°变化至7°时,伺服机构AB与角θ在同一平面内,伺服机构AB的位移由432.0142mm变化为486.0614mm,与角θ垂直的平面伺服机构CD的位移同时由432.0142mm变化为433.0146mm。这说明当两个伺服机构的下支点与喷管的下支点不在同一平面上时,两伺服机构的位移会产生牵连耦合。同时,计算结果给出了伺服机构AB与CD随角φ和角θ同时变化的位移结果,通过数值插值可将其用于系统控制。

表1 LAB伺服机构的位移数据

表2 LCD伺服机构的位移数据
2 基于虚拟样机ADAMS的仿真分析
2.1 仿真模型建立
基于UG和ADAMS协同仿真,建立轴对称推力矢量控制伺服机构的仿真实体模型,如图4所示。在模型中,将机架固定在大地上,忽略杆件连接中的销轴,以转动副替代。分别对部件添加约束条件,约束条件主要包括机架与大地间的固定副、喷管与地面间的球副、电动伺服系统执行机构铰点与机架间的转动副、电动伺服系统执行机构铰点与喷管间的转动副、电动伺服系统执行机构内部的滑动副。
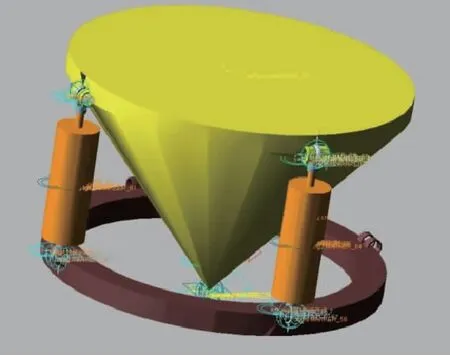
图4 轴对称推力矢量控制伺服机构的仿真实体模型Fig.4 Axisymmetric thrust vector control servo mechanism simulation entity model
2.2 仿真结果分析
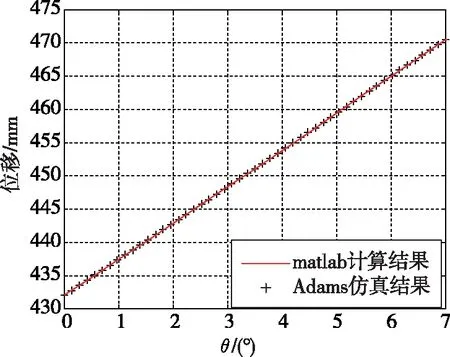
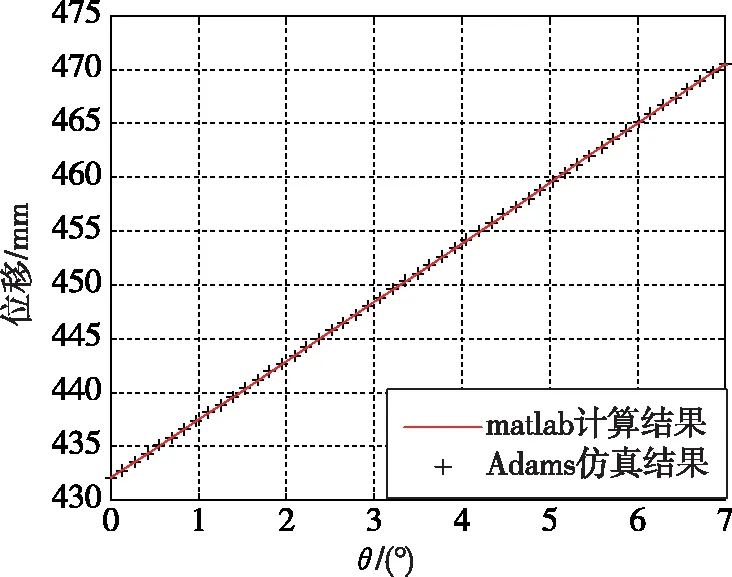
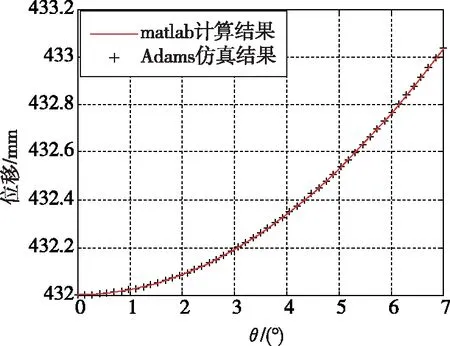
本仿真需要验证给定喷管姿态,反求伺服机构的输出位移。因此,需通过驱动喷管实现在不同角φ(0°、45°、90°)下,角θ由0°变化至7°,变化步长为0.15°。经分析,得到伺服机构AB和伺服机构CD对应的位移曲线如图5所示。
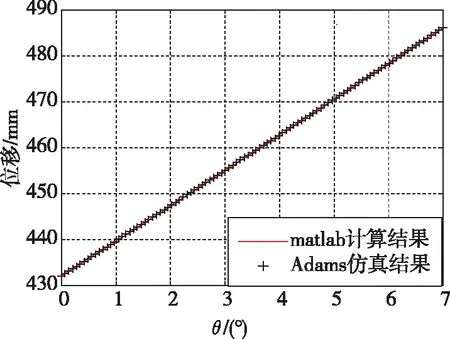
(a)角φ为0°时伺服机构AB的位移
(c)角φ为45°时伺服机构AB的位移
(d) 角φ为45°时伺服机构CD的位移
(e) 角 φ为90°时伺服机构AB的位移

(f) 角φ为90°时伺服机构CD的位移图5 ADAMS仿真结果与Matlab计算结果对比Fig.5 Comparison between ADAMS simulation results and Matlab calculation results
对比ADAMS虚拟样机的仿真结果与Matlab的计算结果,在不同角φ(0°、45°、90°)下,角θ由0°变化到7°时,两种结果的趋势完全一致,且两种结果显示的伺服机构绝对位移误差均不大于0.0012mm。
3 结 论
针对矢量发动机喷管的两个伺服机构间的运动牵连效应问题,本文提出了一种新型空间解耦计算方法。该方法利用欧拉角描述喷管姿态,通过空间齐次坐标变换矩阵原理对两路喷管伺服机构进行了空间位移解耦计算,得到了两伺服机构的伸长量解析解,并通过ADAMS虚拟样机建模验证了单摆双喷管伺服机构空间解耦计算方法的正确性,实现了对喷管摆动方向和摆动角度的精确控制。