车祸远程自动报警系统的设计*
2019-09-07黄岳劲刘忠富董玉华
黄岳劲,刘忠富,董玉华
(大连民族大学信息与通信工程学院,辽宁 大连 116600)
0 引言
如今基本每个家庭都拥有自己私家车,由于种种原因,交通事故越来越频繁。有些人多的地方如果发生车祸,周围人可以进行报警,交警医生们会尽早的来到事发地点实施救援,但是,当车祸发生在比较偏僻以及人烟稀少的地区,没人进行报警,当有人发现的时候可能因为来不及救援车主已经命丧车祸现场了[1]。本系统实现了车祸远程监控以及自动报警,系统采用STM32单片机技术和无线通信技术,可以实现车祸报警的基本功能。
1 系统方案设计
本文所设计的系统是基于STM32单片机技术,结合GPS系统、GSM通信和传感器技术,可以实现以下功能:1)能够精确判断车辆是正常行驶还是发生交通事故。2)能够精确定位出事故地点。3)能够通过短信发送出GPS定位数据。4)结合云技术ONENET平台能够把数据上传进去且定位数据能从平台内找到。
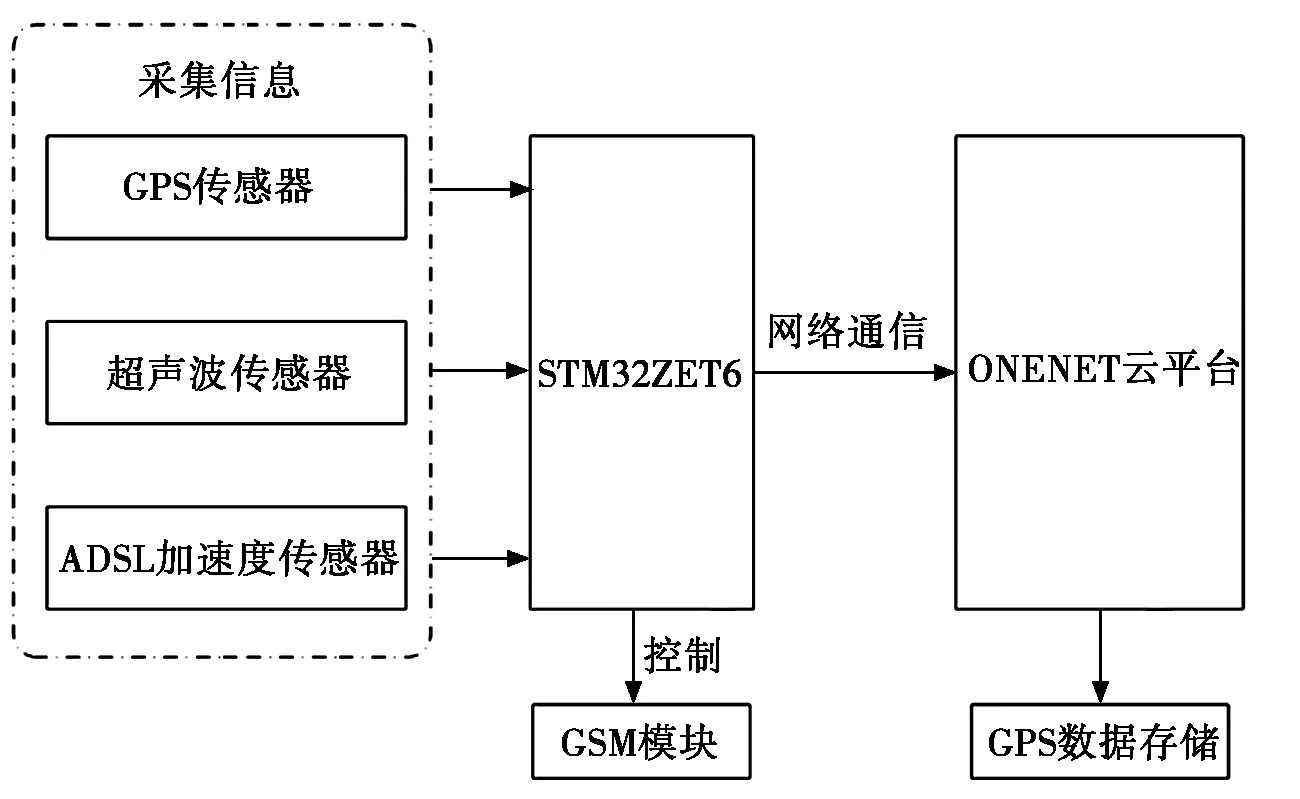
图1 系统方案设计图
2 系统硬件电路设计
系统硬件部分包括GPS连接电路、GSM/GPRS连接电路、加速度传感器模块、振动传感器模块、系统电源模块电路以及调试模块。
2.1 主控电路
主控芯片的选择有两种方案,包括STC89C52和STM32 F103ZET6。本文所采用的芯片是由意大利半导体公司基于ARM公司的CORTEX-M公司生产的STM32 F103ZET6TM32微控制器。它是意大利半导体公司以ARM公司的Cortex-M为核心生产的。它的内部资源(寄存器和外部功能)远远超过8051、AVR和PIC。基本上接近计算机的cpu,因此STM 32比STC 89C52更强大,也更加适合调试[2]。对于本文来说,起最主要的特点是具有超高速的四个串口分别连接GSM、GPS以及超声波。而STC89C52则只有一个串口可供使用。所以,STM32系列单片机无疑是最好的选择。
2.2 GSM电路
系统的传输采用GSM模块,GSM模块采用ALIENTEK引入的高性能GSM模块ATK-SIM86E。SIM86E支持RS232串口,支持5V-24V工作范围,并提供语音、短信和GPRS数据传输功能[3]。可通过AT命令控制。GSM电路图如图2所示。
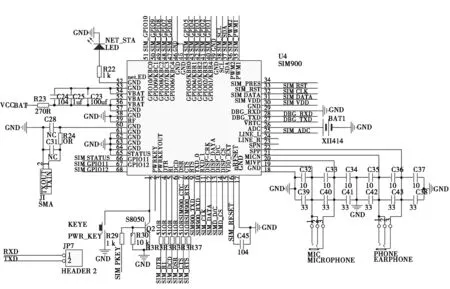
图2 GSM电路
2.3 加速度传感器
由于系统用于高速移动的物体,加速度传感器可以随时监测移动物体的加速度,为系统最终确定物体状态提供重要依据,因此它是信息采集中非常重要的传感器。当我们想要计算车辆的加速度值的时候,通常通过车辆的百里加速时间来计算[4-5]。例如,家用车百里加速的平均时间为10 s~15 s。假设汽车在行驶过程中做匀加速直线运动的正常范围为0.19 g~0.28 g。当汽车受到冲击而由运动变为静态时,汽车的速度在很短的时间内变为零,相应的加速度值将相对较大,通过计算并查阅相关数据后,我们将加速度报警阈值设置为3 g。
基于以上所述,系统最终选择使用数字3轴加速度计ADXL345。ADXL345传感器是具有内部可移动部件的机械结构,这些可移动部件对它们接收的脉冲非常敏感,并且能够很好地检测物体的加速度。ADXL345传感器是一种多晶硅表面微机械结构,位于晶片顶部,由于采用悬浮在晶圆表面结构上方的加速多晶硅弹簧,因此可提供强度电阻。
ADXL345传感器的具体接口电路如图3所示。
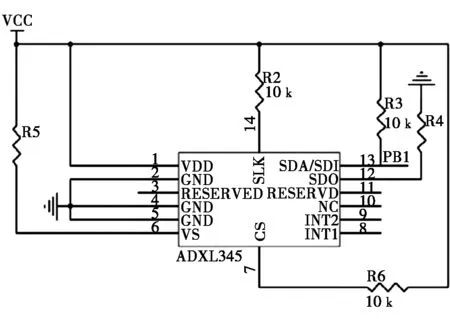
图3 ADXL345 传感器电路图
2.4 GPS传感器
GPS模块用于确定车辆的实时纬度和经度信息。 ATK-NEO-6M模块使用外部增强型天线,搜索和定位功能比没有外置天线的功能更强大。该模块是基于北斗GPS卫星所接定位到的经纬度信号,因此可以快速准确地获取车祸地点GPS信息。
2.5 震动传感器
当汽车被撞击或被砸时,会产生震动信号,震动传感器检测到汽车的异常震动信息,并通过SIM868E模块将该信息发送出去。让别人知道车子发生了车祸。传感器使用ND-1振动传感器。ND-1传感器是一种可以检测物体振动的传感器。因此,许多报警装置使用振动传感器。
ND-1传感器可在很宽的电压范围内工作,工作电压最低为2 V,最大电压为5 V。当检测到车子发生震动时,该传感器输出高电平。 ND-1接口的引脚数少于5个,易于连接。引脚1接地,引脚2连接到延迟设置,引脚3连接到数据输出,引脚4连接到灵敏度设置,引脚5连接到电源的正端。
3 系统软件设计
3.1 系统采集方案设计
系统启动后,初始化硬件设备,感知层模块开始收集车辆信息,收集分为驱动采集和停车采集两部分。 如果汽车正在行驶,它收集车辆加速度和振动信息。当系统确定车辆异常时,STM32主控制器模块向SIM868 E短消息模块发送AT命令。系统采集方案流程图如图4所示。
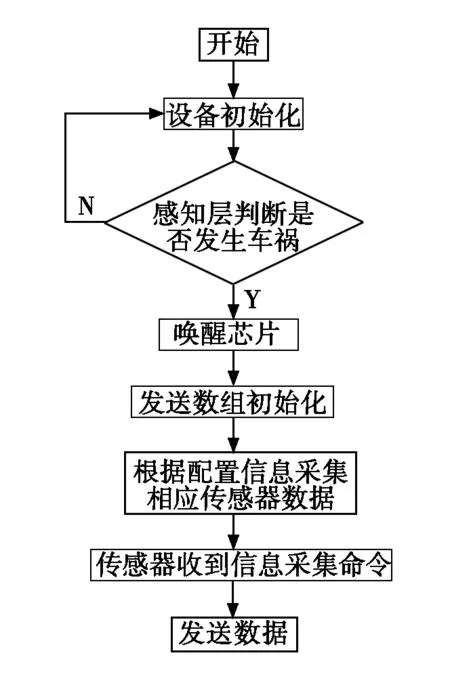
图4 信息采集流程图
3.2 收发短信软件设计
SIM868E模块连接到STM32ZET6的串口2,并为其供电。 SIM868E模块通过STM32。 插入电话卡并上电后,STM32将AT命令集发送给GSM模块,检查是否正常。 GSM模块运作流程图如图5所示。
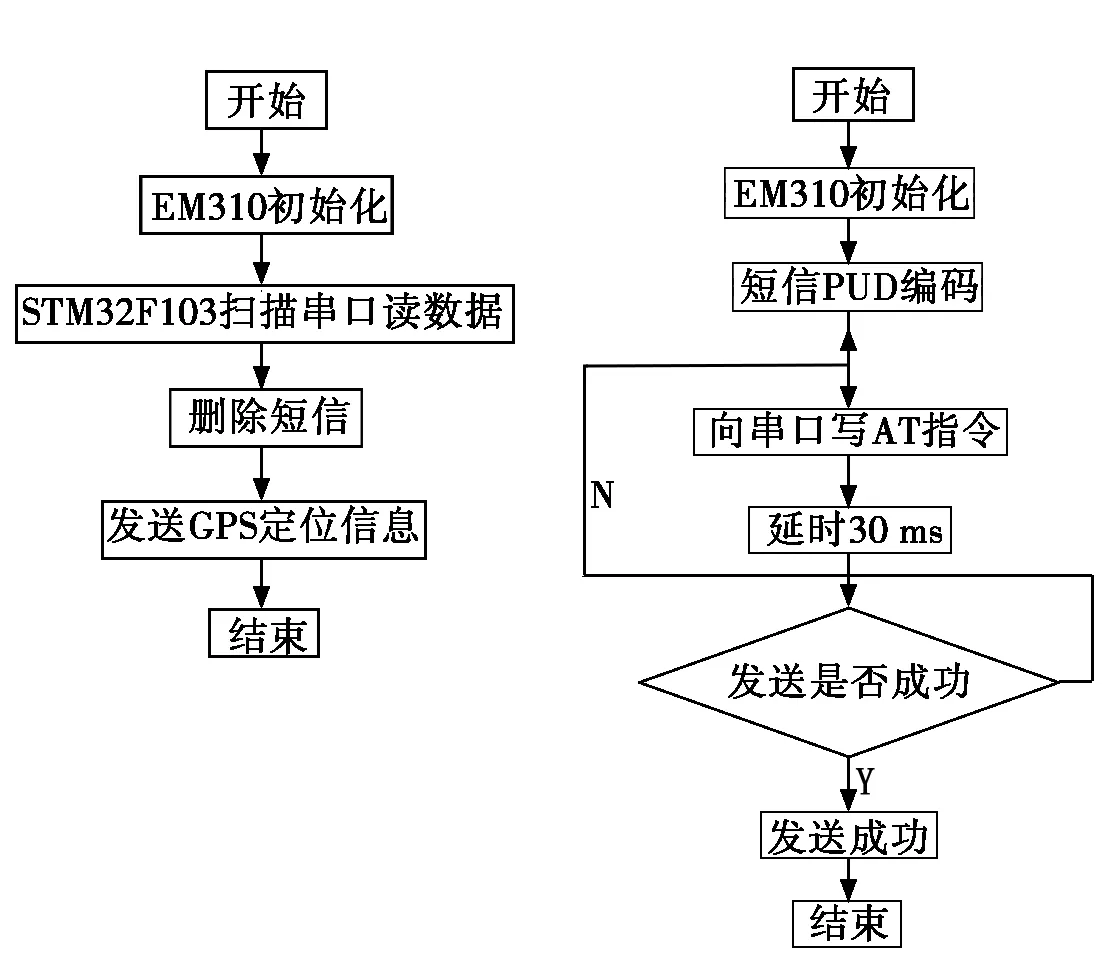
图5 收发短信流程图
3.3 主程序设计
STM32F103ZET6做初始化后,等待采集回来的信息的信息。 主程序正在等待(使用while循环),等待任何可能的输入,然后做出判断,然后进行适当的处理。 系统的主程序流程图如图6所示。
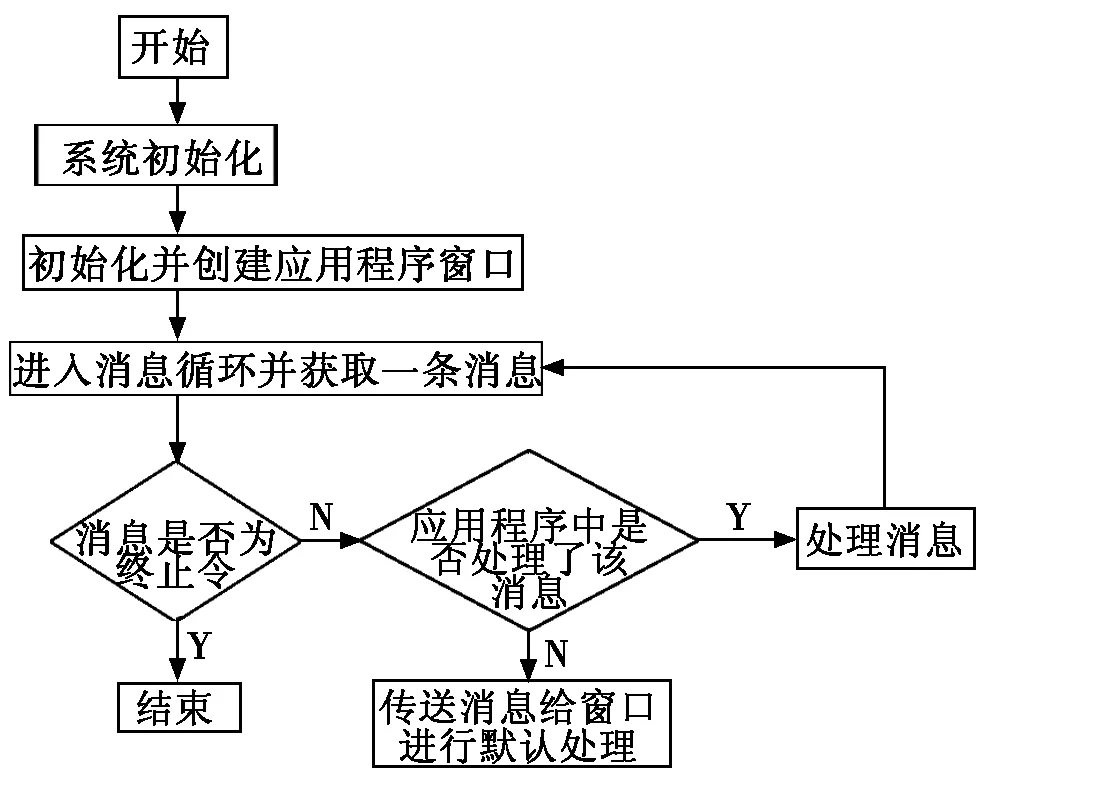
图6 系统的控制层总体流程
4 结束语
在该系统的设计中,在阅读和查询一定数量的文献的基础上,重点研究了系统软硬件的详细设计,并实现了微处理器,加速度传感器,振动传感器,GPS定位模块和GSM模块的选择和设计。在硬件设计的初始阶段,每个传感器都不知道如何使用它。之后,通过查询信息以寻求老师和同学的帮助,并了解每个传感器的使用和注意事项。软件部分的设计主要是对每个子模块的编程。首先,对每个子模块程序进行修改和编译,使子模块在连接到STM32开发板后能够正常工作。最后,把各个模块的程序进行合并。
在设计了系统的软硬件后,测试了系统各模块的应用功能。试验结果表明,该系统的功能基本满足预期的设计要求,使车辆更加智能和方便,从而提高了人们的出行质量。