多传感器数据关联方法
2019-09-07吕奇辰中国人民解放军93117部队
吕奇辰 中国人民解放军93117 部队
引言
多目标实时跟踪过程中,多个传感器对同一目标的测量数据,具有相似特征,但杂波干扰和传感器的测量误差,使得测量数据的特征不完全相同,利用相似特征来判定量测数据的来源就是数据关联方法。
数据关联通常分为几种方式,其中观测/点迹与观测/点迹关联、观测/点迹与航迹关联,一般用于集中式结构;而在分布式信息处理系统中多采用航迹与航迹关联。三种方式都存在于多传感器系统中,按照给定的准则,对数据进行处理,去除干扰数据,实现对航迹的初始化,即为数据关联的任务。
1 集中式数据关联方法
1.1 最近邻域数据关联(NNDA)
最近邻域数据关联算法属于数据挖掘技术,是最简单、最有效、最早提出的数据关联方法之一。如图1 所示,NNDA 中的N 表示统计距离达到最小或是残差概率密度为最大。
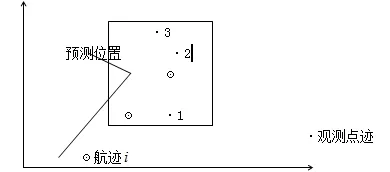
图1 最近邻域数据关联
该方法适用于跟踪目标稀疏的情况,是一种局部最优的“贪心算法”,NNDA 算法的运算量小,易于实现,但在杂波干扰或者目标密集的情况下,错误关联较多。
1.2 联合概率数据关联(JPDA)
JPDA 是Bar Shalom 等人提出的一种数据关联算法,当观测数据落入跟踪门相交区域时,表示这些观测数据可能来源于多个目标。JPDA 计算观测数据与每一个目标之间的关联概率,认为所有的有效回波都源于每个特定目标的概率不同。在杂波环境中JPDA 方法对多目标跟踪的结果较为理想,不需要任何关于目标和杂波的先验信息,但目标和量测数目增多时,与其他算法相比,计算比较复杂,算法详见文献。
2 分布式航迹关联方法
考虑到系统中分布于不同位置的传感器,其信息处理系统的航迹是否具有唯一目标指向性,传感器覆盖范围内是否存在重复跟踪目标的问题,航迹关联算法可以分为基于统计和基于模糊数学的算法。
2.1 基于统计的算法
航迹关联问题可以通过不同的检验统计转化成假设检验问题,如加权修正法、最近邻域法、序贯法和双门限法等。加权修正法在密集目标环境下关联性能下降,在交叉和分岔航迹较多的场合会出现较多错漏关联航迹,最近邻域法也存在错漏关联航迹的情况,序贯算法和双门限算法能较好的修正这个问题。
(1)加权修正

当航迹估计误差间不独立时,可以修正检验统计量为:

(2)最近邻域法

(3)序贯法和双门限法
序贯法考虑历史航迹,改善了加权修正法的问题。该算法来源于雷达信号中的序贯检测。
双门限法,需要设定计数器T,流程如图2 所示,对R 个估计误差样本(系统中两个任意节点),逐个基于X2分布门限进行假设检验,若判定为同一目标的航迹,则T=T+1,否则T 不变。将T 与指定的数 L 进行比较,经过R 次检验后,如果T ≥L,航迹关联判决结束,否则判定为不关联航迹。

图2 双门限法流程图
2.2 基于模糊数学的航迹关联方法
在某些场合中,例如目标密集、随机目标较多、存在较多分岔航迹或者系统中存在较大导航误差、传感器校准误差、传感器转换和延迟误差,用统计学方法来判断航迹关联性是很困难的,不能满足实际要求。
考虑到在航迹关联判决中的模糊性,可以用隶属度函数来界定两个航迹的相似程度,这种方法可以称之为模糊航迹关联法。可细分为模糊函数法和模糊逻辑法,其特点见表1。

表1 基于模糊数学的航迹关联法
3 结论
航迹关联问题在传感器的间距远或没有干扰时,比较简单。对于多目标、噪声、多交叉及分岔航迹的情况,就会比较困难。再考虑更实际的状况,比如传感器组合失配、传感器位置误差、监测目标的误差,航迹关联问题就更为复杂。
文中提到的加权修正法等统计方法均是在某时刻就做出最终判决,准确度不可控。概率数据关联算法或者将各种算法进行组合优化,会相对完善,但是目标增多时,计算量会剧增,应进一步探讨简单实用的关联方法。
