基于EMD和RBF神经网络的大坝形变预测
2019-09-05刘思敏徐景田鞠博晓
刘思敏,徐景田,鞠博晓
(1. 中国地质大学(武汉)信息工程学院,湖北 武汉 430074; 2. 武汉大学测绘学院,湖北 武汉 430079)
全球卫星导航系统(global navigation satellite system,GNSS)能够同时测量多个观测点位的高精度三维变形,随着其硬件及软件的不断发展和完善,GNSS在结构物变形监测方面表现出独特的优势。已有研究表明,利用4 h观测数据进行基线解算,可实现水平和垂直方向精度分别优于1.5、2 mm[1]的目标。
大坝在运营过程中会发生一定程度的变形沉降。基于实测高精度变形时间序列,对变形机理进行解析,进而建立准确的预测模型对其变形趋势进行推估,其结果对于大坝的安全监测与预警具有重要价值。目前,已有许多国内外学者在大坝变形预测领域展开了研究。在常用的方法中,BP神经网络易陷入局部最小值,训练效果对于网络结构非常敏感[2- 3];灰色模型、支持向量机法在历史观测数据样本较大时的预测效果不佳;奇异谱分析法需要相关数据,如水位、温度等[4- 7]。
GNSS大坝变形数据时间序列具有明显的多尺度特征,且可视为非平稳时间序列[5]。本文拟采用经验模态分解[8](empirical mode decomposition,EMD)与径向基函数(radial basis function,RBF)神经网络进行大坝变形预测。EMD具有多分辨率及自适应性的特点,能够较好地处理随机非平稳信号,与小波变换及其他时域分析方法相比,不受小波基选择和分解层数的影响,可广泛应用于时间序列分析、降噪领域、悬索桥动力特性分析[9- 11]。RBF具有最佳逼近及全局最优的优点,同时可快速迭代训练,因此在非线性时间序列的预测中有广泛的应用,在混沌时间序列预测、电力系统短期负荷预测、股票价格预测、肝移植存活率预测[12- 15]中均得到了较好的处理结果。综上,两者结合可以达到很高的预测精度和良好的泛化能力。
本文利用西龙池上水库位于主坝上的测点L022的2012年3月—2014年1月共680 d的观测数据,使用武汉大学自主研发的变形监测软件DDMS解算获得测站各方向的坐标时间序列[1];然后,使用本文所提出的预测模型进行大坝变形预测,并通过与实测变形数据进行对比,分析两者差值的均方根误差(RMSE)和平均绝对误差(MAE),以评价本文模型的预测效果。经实例分析,该模型预测精度高,泛化性能好,受数据精度影响较小,自动化程度高。
1 预测原理与方法
1.1 EMD基本原理
EMD是基于非线性、非平稳数据的自适应时频信号分解方法,通过数据的特征时间尺度来获得本征波动模式,然后分解数据,将原始时间序列分解为一系列由高频到低频的本征模态函数分量(intrinsic mode functions,IMFs)和残余项。
对于信号X(t),EMD利用所有的局部极值来构建包络线并确定包络平均值m(t),进而求临时局部震荡值h(t)=X(t)-m(t),利用得到的临时局部震荡值h(t)代替信号X(t),重复以上步骤并进行循环,直到m(t)的值近似为零,则h(t)即为第1个IMF分量,记为c(t),计算残余项r(t)=x(t)-c(t),利用r(t)代替信号X(t)重复上述步骤,继续求下一个的IMF分量和残余项。
最后,原始信号X(t)经K次分解后可表示为
(1)
式中,rK(t)表示残余项;ci(t)表示第i个IMF分量。
1.2 RBF神经网络基本原理
隐含层的输出为非线性激活函数hj(t)
(2)
式中,bj为一个正标量,表示高斯基函数的宽度;m为隐含层的节点数量。网络的输出由如下加权函数实现
(3)
式中,w为输出层的权值;n为输出节点个数;y为神经网络输出。
1.3 基于EMD和RBF神经网络的大坝预测模型
本文仅对大坝进行短期的变形预测,具体流程如下:首先从原始数据中通过最小二乘法去除趋势项,得到新时间序列{X(t)},对新序列进行自适应经验模态分解,得到不同尺度的IMF和残余项,采用RBF神经网络根据高、低频IMF采用不同的步长分别预测n个IMF和残余项,最后叠加各尺度下的预测结果,获得大坝变形预测值。本文数据处理流程及预测模型结构如图2所示。
2 工程实例分析
本文以西龙池上水库GNSS大坝变形监测系统为例,选取水库主坝体L022号GNSS监测点2012年3月—2014年1月共680 d的变形时间序列进行建模,数据处理采用DDMS软件,采用4 h时段静态解算模式,共4080期数据。以1~4000期数据建立RBF神经网络进行网络训练;以4001~4080期数据作为试验数据。RBF神经网络的迭代次数为1000,神经网络结构为24- 1- 1或48- 1- 1,即输入层的节点数为24或48,隐含层为1,输出层为1。为降低建模误差,神经网络训练前对4080期数据均进行归一化处理,预测后反归一化为真实预测值。
本文首先使用最小二乘法去除原始时间序列中的趋势项,由于三阶拟合能较好地拟合出变形趋势,因此笔者认为最小二乘三阶拟合结果为时间序列的趋势项。图3中黑线为原始时间序列,灰线为去趋势项后的时间序列{X(t)},去趋势项后可以更加准确地看出时间序列的周期性波动。
然后进行归一化处理,并通过EMD分解时间序列, 分解结果如图4所示。 EMD基于信号本身特点将信号自适应地分解成9个尺度的IMF,时间序列中隐含的不同周期信号被分解成不同尺度的信息。
采用RBF分别预测各IMF和残余项,得到各IMF和残余项的预测值,然后叠加各尺度下的预测结果,获得大坝变形预测值。N、E、U 3个方向的预测结果及误差如图5(a)—(c)和表1所示。实测值与预测值在N方向最大误差为2.6 mm,E方向最大误差为1.3 mm,U方向受数据本身精度影响,有异常值存在,最大误差为8 mm,3个方向的RMSE分别为0.878 6 mm(N)、0.360 4 mm(E)和2.235 mm(U),且预测期数越短,误差越小。3个方向的高频部分预测值与实测值吻合度较好,能明显预测出高频的走势。
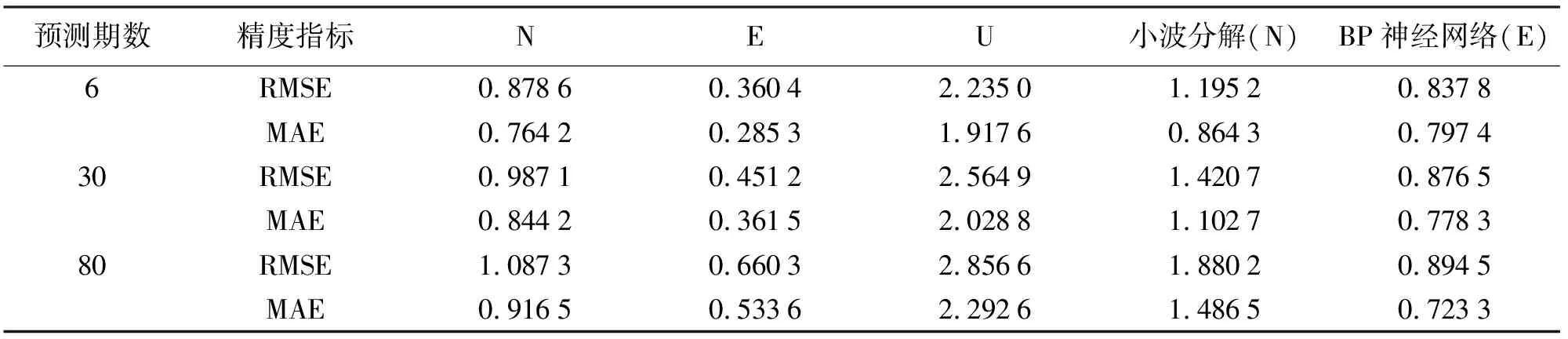
表1 L022号站3个方向的RMSE与MAE mm
为比较EMD方法与小波分解方法在预测准确性上的差异,分别使用两种方法对N方向的变形时间序列信号进行分解,对分解后的各个分量使用RBF进行预测,并对比其预测精度,结果如图5(a)、(d)及表1所示。由图1可知,使用EMD方法对信号进行分解,明显比小波分解的预测精度更高,高频部分符合更好。通过表1对比两者预测结果,本文使用的方法在不同预测期数下的预测精度均明显高于小波分解。
为了评价本文预测方法的整体预测效果,选用BP神经网络与本文预测模型的预测结果进行对比。以E方向为例进行对比试验,两种预测方法的预测结果如图5(b)、(e)及表1所示。本文预测方法最大误差为1.3 mm,高频部分和低频部分都与实测值符合较好,能较为准确地反映真实的变形信息;BP方法预测结果的最大误差为2.7 mm,低频趋势预测结果较好,但高频部分不能准确预测。RBF预测结果的MAE、RMSE较BP分别最高可提高63%、57%。
3 结 语
随着GNSS自动化变形监测技术在大坝、滑坡、桥梁等领域的广泛应用,基于大数据、神经网络等理论和方法的变形预测已成为当前的一大研究热点。本文针对GNSS大坝变形时间序列的预测问题,提出了一种结合EMD与RBF神经网络的预测大坝变形的新方法。经对比试验表明,该方法的预测值与真实值在N、E、U 3个方向的RMSE分别为0.878 6、0.360 4和2.235 mm,具有很高的预测精度和良好的泛化能力。
