一类高斯混合噪声干扰的系统拆分与滤波方法设计
2019-09-04宁子健杨艳萍冯肖亮
宁子健 杨艳萍 冯肖亮


摘 要:文章针对这样一类系统:状态方程与观测方程中含有均值为零的高斯噪声且含非零均值的高斯噪声,提出了一种基于系统噪声拆分的滤波算法。首先将状态方程与观测方程分别拆成两个仅含有一个噪声的方程;然后,对两个方程分别进行滤波;最后,进行融合。仿真结果表明相比直接使用卡尔曼滤波方法,系统噪声拆分方法提高了滤波的估计精度。
关键词:零均值的高斯噪声;卡尔曼滤波;系统噪声拆分
中图分类号:TN713 文献标志码:A 文章编号:2095-2945(2019)23-0104-02
Absrtact: In this paper, a filtering algorithm based on system noise split is proposed for such a class of systems: the equation of state and the observation equation contain Gaussian noise with zero mean and non-zero mean. First, the state equation and the observation equation are divided into two equations with only one noise; then, the two equations are filtered respectively; finally, the fusion is carried out. The simulation results show that compared with the Kalman filter method, the system noise resolution method improves the estimation accuracy of the filter.
Keywords: zero mean Gaussian noise; Kalman filter; system noise resolution
1 概述
卡爾曼滤波是最小均方估计意义下的一种迭代递归算法,求出的线性系统中的估计值是最优的,使得卡尔曼滤波的使用越来越广泛[1-3]。但是它的噪声要求必须是均值为零的高斯噪声。但是当状态方程与观测方程中同时含有均值为零的高斯噪声与非零均值的高斯噪声时,它可能并不是最优的,因此本文提出了一种基于系统噪声拆分的方法。
2 系统描述
考虑如下系统的状态方程:
上式中,x(k)为k时刻的系统状态,y(k)为k时刻的系统观测,F(k,k-1)为状态转移矩阵,H(k)为观测方程转移矩阵。
3 基于系统噪声拆分的滤波器[4]
状态方程与观测方程分别含有均值为零的高斯噪声和非零均值的高斯噪声时,将系统中状态方程拆分成含有高斯噪声的子系统和均值不为零的高斯噪声的子系统,同样,将系统中观测方程拆分成含有高斯噪声的子系统和均值不为零的高斯噪声子系统。
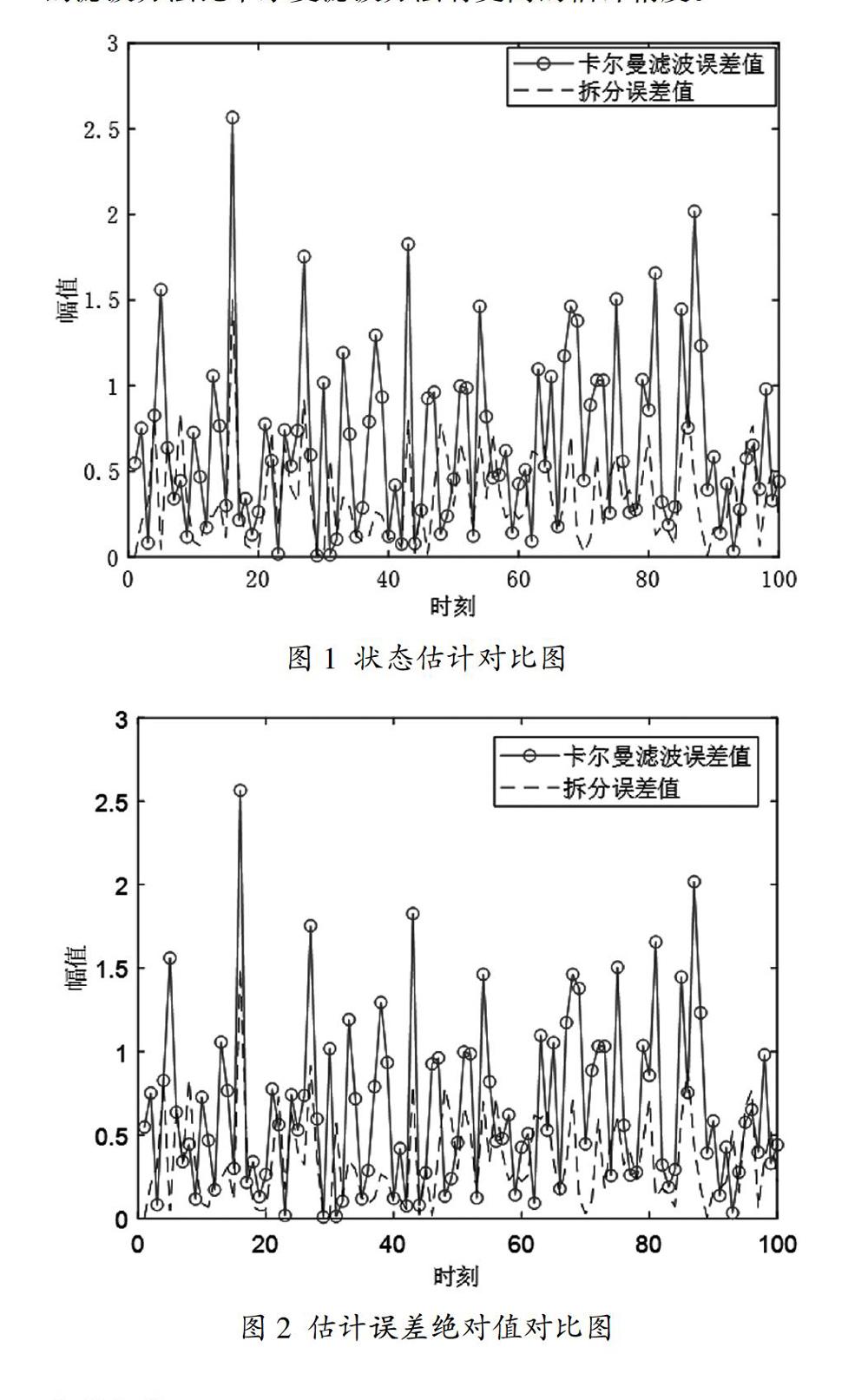
5 结论
本文对状态方程与观测方程中含有均值为零的高斯噪声与非零均值的高斯噪声,将状态方程与观测方程分别拆成两个只含有一个噪声的子系统,组合成两个子系统,分别进行滤波并融合。仿真结果表明,基于系统噪声拆分的滤波方法比卡尔曼滤波方法有更高的估计精度。
参考文献:
[1]Kalman, R. E . A New Approach to Linear Filtering and Prediction Problems[J]. Journal of Basic Engineering, 1960,82(1):35.
[2]彭丁聪.卡尔曼滤波的基本原理及应用[J].软件导刊,2009,8(11):32-34.
[3]张友民,戴冠中,张洪才.卡尔曼滤波计算方法研究进展[J].控制理论与应用,1995(05):529-538.
[4]宋义轩,冯肖亮.基于观测分解的一类非线性滤波方法[J].科技创新与应用,2018(05):91-92.
