一种频点裁剪算法在差分定位中的应用*
2019-09-03赖川,高科
赖 川,高 科
(西南电子技术研究所,四川 成都 610036)
0 引 言
随着美国全球定位系统(Global Positioning System,GPS)的建立,人们正式进入卫星导航时代。GPS系统早期是供美国军方使用的,后期技术成熟后才逐步对民用开放。但是美国为了保障自己使用GPS的安全和利益,针对不同用户,提供了标准定位和精确定位两种服务[1]。一般民用的是标准定位,这种定位效果较差,定位精度一般都在10 m左右[2-7]。无法满足数据链时间同步、空中加油、编队飞行、飞机进场着陆等高精度应用场景。因此,如何在现有条件下提高定位精度,成为人们研究的重点。差分定位技术的出现,很好的解决了这个问题。早期的差分定位技术多使用伪距差分定位[8-9],这种差分定位解算简单,定位精度能达到米级,甚至亚米级。能很好满足民用甚至大部分军用需求。但是依然无法满足数据链同步这种需要厘米级、甚至毫米级的高精度定位需求。载波相位差分定位技术应运而生了[10]。这种差分定位技术能够达到厘米级甚至毫米级的精度,但是载波相位的整周模糊度的计算却是一个难点! lambda算法[11-12]的出现,很好的解决了这个问题。lambda算法的搜索空间复杂度跟共视卫星数(实际为参与计算的频点数)的多少成正相关性。即共视卫星数越多,搜索空间越大,lambda解算频率降低,甚至会出现无法解算的情况。无法满足飞机进场着陆这种高实时、高精度定位的场景。
为解决上述问题,本文提出了一种频点裁剪算法,缩小lambda算法的搜索空间,有效地提高定位频率,但是不降低定位精度。
1 载波相位差分定位的频点裁剪算法
本节首先简要介绍载波相位双差知识,指出lambda算法搜索空间受到频点参数的影响,然后引入频点裁剪算法思路。
1.1 载波相位差分定位算法
如图1所示,载波相位差分定位技术是利用用户和基准站同时接收卫星信号,基准站播放差分校准数据和位置信息给用户,用户根据接收到的卫星信号和基准站的差分校准信息进行差分计算。由于基准站位置提前精确测量,因此,只要计算得到和基准站的相对距离,就能获得精确的用户位置信息。

图1 卫星和接收机关系图
一般地,记基准站r或用户u到卫星i的载波相位测量值为:

其中:x表示基准站r或者用户表示接收机x到卫星i的载波相位测量值;λ表示载波波长;表示接收机x到卫星i的几何距离;表示接收机x到卫星i的电离层误差;表示接收机x到卫星i的对流层误差;f表示载波频率;δtx表示接收机x的钟差;δt(i)表示卫星i的钟差;表示接收机x接收到卫星i载波相位的整周模糊度;表示接收机x与卫星i的其他误差值。
以基准站为参考,将用户接收机u与基准站r对卫星i的载波相位测量值做差,得到:

通过式(3)可以发现,单差消除了卫星钟差影响。当用户和基准站位置较近时,单差的电离层误差几乎为零,又由于两者位于同一高度,故对流层误差也同样趋于零。因此得到:

接着,再以基准站和用户的共视卫星i作为参考,利用共视卫星j的单差载波相位测量值再进行一次求差,得到:

通过式(6)发现,双差消除了接收机钟差误差。假设基准站和用户某时刻共有M颗卫星,则有:
考虑到载波相位差分实际求解的是用户u与基准站r之间的相对距离。当用户和基准站之间距离较短时,可以认为用户和基准站相对于卫星来说,处于平行的位置上,由图1所示的向量关系得到:

将式(8)带入式(7)得到:

通过式(9)可知:载波相位双差观测方程的维度直接和共视卫星数M相关,M越大,可用频点数越多,观测方程的维数越高,求取整周模糊度N的难度也就越大。
1.2 频点裁剪算法
通过1.1节了解到双差载波相位定位的求解和用户与基准站的共视卫星数直接相关。特别是在多系统联合定位时,共视卫星成倍增长,对于定位的精度没有实质的提升效果,但是大大增加了整周模糊度的求解难度。如何在不降低定位精度的条件下,提高求解整周模糊度的效率是本文需要解决的问题。
考虑到接收机接收卫星信号时,容易受到大气层,建筑物等的影响。使得接收到的信号强度有强有弱,同一颗卫星不同频点的信噪比也会有所不同。例如:参与定位的GPS系统使用的L1和L3双频点定位,那么式(9)的实际维数为2M-2维,即每使用一个频点的载波信号量参与计算,就会增加一个纬度。实际定位过程中,并不需要所有有效信号的频点数据都参与计算,只需要足够的频点数,能够计算出基线向量值,就可以保证求的用户的精确位置。所以,考虑对参与定位的频点进行裁剪,提高计算效率,减少冗余数据。
记接收机收到卫星i、频点fj的信噪比为其中,M表示基准站和用户的共视卫星数。j表示使用的频点,这里默认使用的双频定位系统。设频点信噪比剔除门限为Thd。参与计算的频点数为CALn。信噪比越高的频点,它受到外界的干扰就越小。故裁剪频点的原则是优先裁剪信噪比差的频点。
首先将参与计算的频点对应的信噪比值按从低到高的顺序进行排序,得到:[SNR1,SNR2,…,SNR2(M-1)]。
最后,剔除不需要参与计算的频点。分为两步:
第一步:剔除小于AVGca值的频点,得到[SNRk,SNRk+1,…,SNR2(M-1)],其中SNRk-1<AVGca<SNRk。此时,剩余频点数为2M-k-1。
第二步:如果2M-k-1大于CALn,则信噪比值由低到高依次剔除2M-k-1-CALn个频点,得到[SNR2M-1-CALn,SNR2M-CALn,…,SNR2(M-1)]。如果2M-k-1小于等于CALn,则不做处理。
2 算法验证
基于上述裁剪算法思路,利用GNSS模拟器同时向地面站和移动站发送卫星射频信号。模拟器周期100ms输出地心地固(Earth-Centered,Earthfixed,ECEF)坐标系下移动站位置信息。地面站周期500ms向移动站播报差分校正数据。移动站根据卫星信号和差分校正数据,进行载波相位差分计算。移动站周期500 ms输出ECEF坐标系下定位结果和当前历元定位时间,数据记录到设备自带的flash中,供事后分析使用。地面站和移动站均使用NovAtel公司的OEM628板卡提供原始观测量数据。具体设置参数:地面站:圆周运动,圆心位置:N36°,E116°,海拔高189.609 m,椭球高200.6 m,圆半径1 800 m,速度300 m/s。移动站:圆周运动,圆心位置:N36°,E116°,海拔高2 000 m,椭球高2 010.991 m,圆半径1 800 m,速度300 m/s。基线长度范围:12.048~12.051 km。GNS S模拟器信号功率设置为相对功率-35 dBm。移动站定位计算使用的是Xilinx公司的ZYNQ7020芯片自带的ARM CortexTM-A9核作为处理器。解算时间利用FPGA做的时钟计数,精度为μs级,Thd=30。
如图2、图3、表1所示的测试结果。其中图3的位置误差信息是差分定位数据与GNSS模拟器输出数据在对应时间点之差。

图2 定位算法耗时

图3 定位算法精度
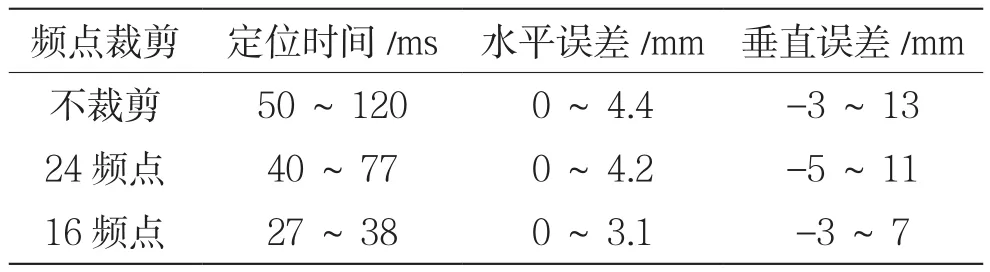
表1 测试结果
图2和表1表明,随着频点数的减少,定位时间显著减少。时间由50~120 ms减少到27~38 ms。图3和表1表明,虽然频点数减少,但是定位结果的水平误差和垂直误差并没有受到影响。水平误差在0~4 mm,精度达到mm级;垂直误差在-5~13 mm,精度达到cm级。所以,频点裁剪算法对载波相位差分定位频率提升有效。
3 结 语
随着联合定位系统的广泛应用,人们对高精度、高效率的定位要求也越来越高。通过对定位频点数的裁剪,有效地提高了定位效率,同时又能很好的满足高精度的定位需求。为高精度、高效率定位提供了一种新的思路。
