采用光电图像测量技术改进的单缝衍射实验*
2019-08-27林睿
林 睿
(1.重庆工商大学 计算机科学与信息工程学院,重庆 400067;2.重庆市检测控制集成系统工程实验室,重庆 400067)
0 引 言
在传统的激光单缝衍射实验[1-4]的过程中,学生需要不断调节光敏探头的位置,对单缝衍射图样的光强逐点进行采样测量,这种测量的采样通常是步进等距采样,在此基础上还要记录数据,绘制曲线图。采样间距越小,学生需要花费的测量时间就越多,而为了减少测量时间,采样的步进距离通常较大。如:以0.5 mm为一个点的步进距离(测量位置坐标的螺旋测微器鼓轮转一圈或半圈),这样会造成衍射光强极小值位置测量的不确定度大于0.1 mm。
随着现代科学技术的发展,已经有不少光学实验实现了智能测量。有的利用单片机控制步进电机,带动光敏探头进行测量,系统采集数据,自动化处理,在计算机上显示实验结果[5-7];也有利用CCD直接测量光强分布[7,8],实现数据自动采集和结果处理,但CCD需要专门的计算机采集卡或采集接口。上述的两种测量方法的实验成本较高,只有少数高校能够开展相关的实验。
在数字图像处理技术[9]的基础上,提出并开发了一种成本低廉适合各类高校开展的单缝衍射实验的光电图像测量系统。该系统采用廉价摄像头,以C#开发平台Visual Studio 2010进行图像采集和处理软件的开发[10],完成拍摄单缝衍射光强分布图像、衍射光强第一极小值位置搜索和图像像素尺寸定标等功能,在此基础上完成的单缝衍射实验既克服传统单缝衍射实验精度低、费时长的缺点,又能在低廉成本的基础上实现单缝衍射实验的数字化、可视化和现代化。
1 基于摄像头的光电测量系统构建
本文提出的光电图像测量系统主要由硬件系统(摄像头和USB接口)以及软件系统构成。摄像头采用普通的带有USB接口的通用摄像头构成,该摄像头的图像采集部件是分辨率为1 080×720像素数的CMOS芯片。软件系统包含5个软件模块,分别是微软自带的摄像头驱动软件包avicap32.dll,基于C#的USB摄像头操作软件模块、衍射图像定位模块、衍射第一极小值搜索算法模块、摄像头像素尺寸定标模块。微软自带的摄像头驱动软件模块是已经封装好的成熟的软件模块,提供了相应函数的调用接口;基于C#的USB摄像头操作软件模块在文献[10]中已有很好的实现例子,因此本文构建光电图像测量软件系统时主要研究其他3个软件模块的实现。
1.1 衍射图像定位模块
为了便于图像采集后能迅速搜索到衍射第一极小值位置以及减小测量误差,单缝衍射的光强分布必须以摄像头采集图像的基线为准,即衍射方向应该与摄像头采集图像的横坐标方向一致。为此,在图像采集窗口上构建了一组用于衍射图像定位的标线(如图1(a)所示),并通过鼠标屏幕取坐标的方式实现采集图像上两个像素点的像素间距的测量。在采集衍射图像前,打开摄像头,依据图像采集窗口上的定位标线调节单缝的方向和位置,使图像采集窗口上显示的衍射图像在水平方向上与定位标线的中央水平线平行。利用定位模块中鼠标取坐标值测量像素间距的功能,逐渐精细调节狭缝的方向和位置,使得衍射图样分别对中央水平标线和中央竖直标线大致成对称分布。最后在暗室的环境下获得衍射图像的定位结果,如图1(b)所示。
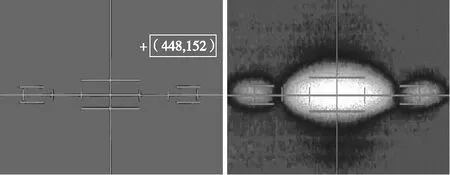
(a)衍射图像定位标线 (b)衍射图像定位结果
1.2 衍射第一极小值搜索算法模块
目前,多数高校开设的单缝衍射实验需要测量出衍射光强的两个第一极小值间距及衍射距离来测量缝宽。本文采用光电图像测量技术实现衍射光强的两个第一极小值间距的测量,其测量过程是:在暗室环境中的计算机上显示的采集窗口获得调整好定位的狭缝衍射图像后(如图1(b)),对衍射图像进行采集,保存到计算机中,然后利用数字图像处理的方法计算出两个衍射第一极小值的像素间距。这就必须依靠本文所提出的衍射第一极小值的搜索算法。
图1(b)的衍射光强第一极小值的搜索算法的基本思想是:将采集到的衍射图像的强度投影到图像的水平轴上形成一维分布的数据(这是因为暗室环境下衍射光强在水平方向上的分布与采集到的图像的灰度在水平方向上投影的分布情况相同,采用软件对数据可视化后如图2所示),利用极小值判断方法(即:极值点的左右相邻点强度与极值点强度的差都大于0),采用一个长度为奇数的游动窗口从上述一维数据序列的中央分别向两边搜索第一极小值,其中游动窗口的中心为序列中的待考察数据点。当游动窗口范围内的其他数据点强度与待考察数据点强度的差都大于0时,该考察点即为极小值,其水平像素坐标为极小值像素坐标。当取得两个极小值的位置后,将位置相减即可得两个第一极小值间的像素个数。
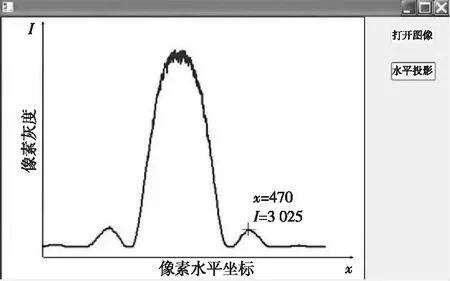
图2 衍射光强图像水平投影的数据可视化Fig.2 Data visualization for horizontal projection of diffraction intensity image
相应的算法流程如图3所示。图3中I(x)表示将图像投影到水平轴上所获得的一维强度序列,x是离散化的图像的水平坐标,xc为一维序列I(x)中心所对应的水平坐标位置;所采用的游动窗口长度为L=2k+1,为了既能准确有效地检测出极小值位置又能实现快速计算,通常可以使5≤k≤10,本文中选择k=7;算法从序列中心分别向两边采用游动窗口搜索第一极小值,x1和x2分别为两个游动窗口的中心,算法分别计算两个窗口中对应的一维序列I(x)中的其他数据与I(x1)和I(x2)的差值Δ1和Δ2,当Δ1(Δ2)小于0时,标记D1(D2)为0,当Δ1(Δ2)大于或等于0时,标记D1(D2)为1;F1和F2是用于判断检测位置为极小值位置的标记,在依次遍历游动窗口对应的一维数据I(x)的计算过程中,通过迭代乘法运算F1=F1×D1和F2=F2×D2来实现极小值判断,即:如果遍历窗口数据后F1(F2)大于0则窗口中心数据为极小值,否则修改窗口中心位置再继续重复上述步骤进行搜索。当搜索到两个极小值位置x1和x2后搜索终止,两个极小值的像素间距即为Δx=|x1-x2|。

图3 衍射第一极小值搜索算法流程图Fig.3 Algorithm flow chart for searching the first minimum of the single slit diffraction
1.3 摄像头像素尺寸标定模块
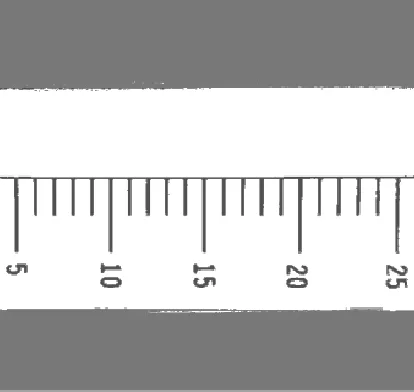
为了测量出两个极小值的空间间距,必须对像素的尺寸进行测量标定。其方法是:拍摄清晰的刻度尺图像,使拍摄刻度尺图像和拍摄衍射图像的相机保持成像距离和焦距不变,测量一定长度的刻度尺的像素数,从而对像素的尺寸进行标定。而为了准确地对像素尺寸进行标定,必须对刻度尺进行定位,使得刻度尺的水平刻度线和竖直刻度线分别与图像的横坐标轴和纵坐标轴平行。因此,在像素尺寸标定模块中包含有刻度尺定位子模块。此外,像素尺寸标定模块中还包含有刻度尺图像像素标定算法子模块。刻度尺定位模块的实现如图4所示。图中的方框为程序所绘制的刻度尺定位标线。在保持摄像头的成像清晰的情况下,调整夹持摄像头的二维调节架使刻度尺的竖直刻度线和水平刻度线分别与定位标线的竖直线和水平线相互平行。在刻度尺的位置调整到了图4所示的结果后,采集刻度尺图像,应用刻度尺图像像素标定算法实现像素尺寸的定标。算法的基本实现过程如下:
Step1 将采集到的刻度尺的图像进行灰度化,并依据其灰度分布特点采用平均灰度值为阈值对图像进行二值化操作(如图5(a));
Step2 应用Sobel算子对二值化后的图像进行边缘检测,生成包含有刻度线边缘直线的图像(如图5(b));
Step3 依据定位标线所在的图像位置对边缘直线进行统计(如图5(c)),从左至右标记序数为奇数的边缘直线的像素水平坐标位置;
Step4 计算出相邻奇数边缘的像素间距Δn,并依据定位标线所处的刻度线位置(中央水平线下方第一条短的水平标线)的相邻刻度线间距l(本次测量中l=20 mm)可计算得到所检测到的每相邻两个刻度线之间的像素尺寸。
Step5 对所有根据相邻刻度线计算出的像素尺寸进行平均,即可得到定标的像素尺寸。

图4 刻度尺定位模块Fig.4 Location module of the graduation ruler
(a)刻度尺图像二值化
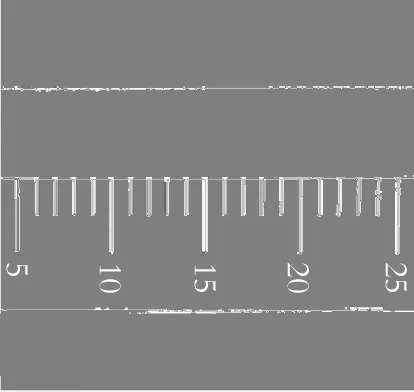
(b)边缘检测 (c)定位标线处边缘的统计
图5 像素尺寸标定过程
Fig.5 Process of pixel size calibration
2 衍射光强的光电图像测量系统
本文提出的实现单缝衍射图样的光强分布测量的光电图像测量系统如图6所示。He-Ne激光器S发射激光经过宽度为a的狭缝Slit在成像屏P上形成衍射图像,狭缝附带一个螺旋测微器(0.01 mm精度),其宽度可由螺旋测微器进行调节,并能由螺旋测微器直接测量出狭缝的宽度,狭缝的方向可以调节;成像屏P采用厚1 mm的白色PMMA材料制成,屏上形成的衍射图像可以透过部分衍射光,由于成像屏采用干板夹进行夹持,因而在成像屏的相同位置也可换作夹持刻度尺。用于采集透过成像屏P上的衍射光所形成图像的通用摄像头被持在二维倾角调节架(俯仰角和水平角)上,此二维倾角调节架支撑在一个三维调节(水平二维调节和竖直调节)的底座上。P1、P2为偏振片,用于调节入射到狭缝的激光光强,以使成像屏上形成的衍射图像的光强适合摄像头采集图像的强度;计算机处理摄像头所拍摄的图像。摄像头在暗室情况下拍摄光强合适的衍射图像,在计算机上对图像进行灰度处理。

图6 单缝衍射实验光电图像测量系统示意图Fig.6 Diagram of photoelectric image measurement system for diffraction experiment
依据图6构建了实验系统,在该系统上需要依照如下的步骤完成单缝衍射实验:
Step1 调节光路。首先调节He-Ne激光器出射的激光束等高,然后再调节各个器件等高共轴,轴线为He-Ne激光束所在位置。
Step2 打开激光,调节狭缝的宽度和角度,并调节摄像头与光屏的相对位置,使狭缝的衍射图样清晰且对称地分布在定位标线所标定的区域。
Step3 旋转偏振片使光屏上的衍射光斑消失,然后将光屏换为刻度尺,调节摄像头倾角和位置,使摄像头能采集到清晰且与刻度尺定位标线能对齐的刻度尺的图像。
Step4 固定夹持刻度尺的干板夹和摄像头的位置,拍摄刻度尺图像10幅。
Step5 将刻度尺换成成像光屏,旋转偏振片使摄像头采集到的衍射图像的强度适中,调节狭缝方向使衍射图样对称地分布在定位标线所标定的区域。
Step6 拍摄单缝衍射图像10幅。
Step7 单缝到衍射屏的距离D用毫米刻度尺测量10次。
Step8 从单缝自带的螺旋测微器上读出狭缝的宽度a0。
上述步骤中,Step1和Step2可确保在相机视场的有效范围内能拍摄到包含了衍射1级的衍射图像;Step3—Step5能确保拍摄到的衍射图像清晰,并能使刻度尺的图像与衍射图像有相同的拍摄焦距和成像距离。
完成上述测量步骤后,利用提出的算法所编制的软件计算出两个衍射强度第一极小的像素间距Δx和l=20 mm的刻度尺的像素间距Δn,则单缝衍射的两个第一极小值实际间距为
(1)
依据衍射理论,由两个单缝衍射强度第一极小间距d和衍射距离D,计算待测单缝宽度a为
(2)
则由式(1)和式(2)可得:
(3)
3 测量结果和分析
依据构建的光电图像测量系统和相应的实验步骤,完成单缝衍射实验的测量,其中由螺旋测微器读出狭缝宽度a0=0.160 mm,而He-Ne激光的标称波长为=632.8 nm;并且分别采集到了10幅衍射图像和10幅用于像素尺寸定标的刻度尺图像,利用提出的算法计算出10组Δx和Δn,其结果如图7(a)和图7(b)所示,10次测量的衍射距离D如图7(c)所示,图7中可视化的数据图中虚横线为测量数据的均值线。
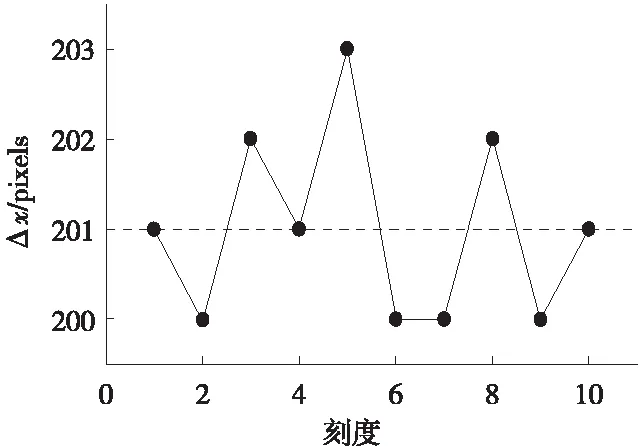
(a) 两个衍射强度第一极小的像素间距Δx
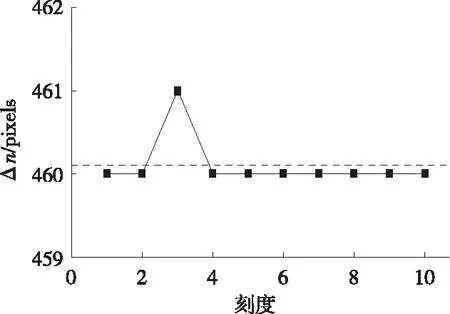
(b) l =20 mm长度的刻度尺的像素间距Δn
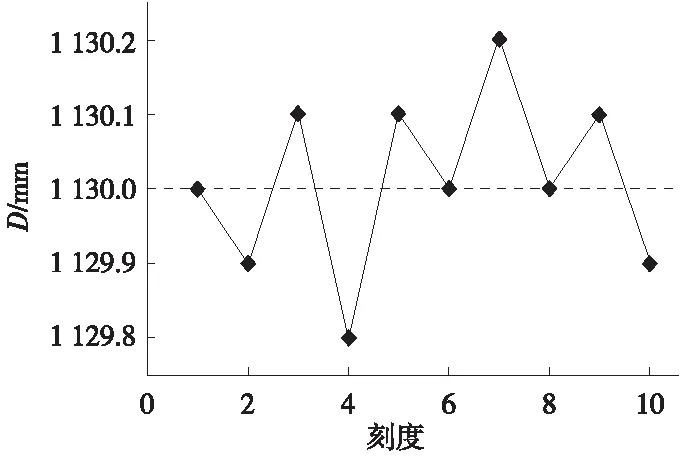
(c) 单缝衍射距离D
图7(a)表明利用光电图像测量系统测量出的单缝衍射两个第一极小值像素间距具有不规律起伏,这种起伏的主要原因是激光器的功率不稳定造成的出射光强的随机变化从而引起了探测到的两个第一极小值的位置变化,通过拍摄多幅衍射图像进行平均可以减小光强的随机起伏对测量的影响。而在通常测量耗时长的单缝衍射实验中要减小这种由于光强随机起伏对测量误差的影响是很难实现的。图7(b)显示出本文提出的像素尺寸标定的算法是稳定的。采用毫米刻度尺测量衍射距离时由于刻度线对准误差和估读造成了图7(c)的随机起伏。上述测量项目的均值和标准差如表1所示。
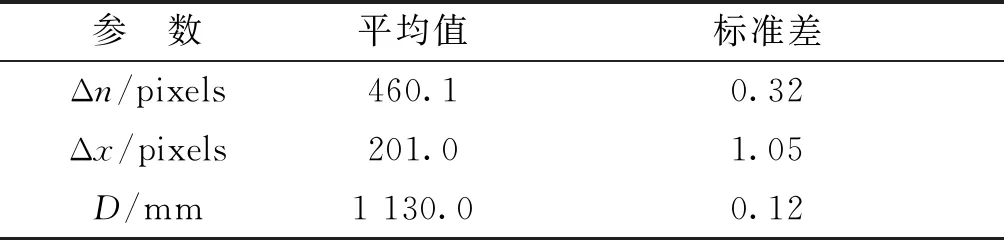
表 1 测量项目的统计结果
依据表1和式(3)可以计算得到单缝的缝宽均值为a=0.164 mm,与螺旋测微器测出的狭缝宽度的相对误差为2.5。
利用上述数据可以有效地评估本文所提出方法的测量不确定度(这里仅讨论统计不确定度)。根据误差传递理论,按照式(3)测量的狭缝宽度a的相对不确定度可以计算如下:
(4)
其中,a、D、Δx和Δn都采用均值,为标准差。依据表1,可以计算得到狭缝宽度a的相对不确定度为5.271×10-3。
上述结果表明,本文所提出的采用光电图像测量技术改进的单缝衍射实验具有较高的测量精度。而传统的单缝衍射实验则不可能在较少的实验课时中完成上述测量不确定度的估计。
4 结束语
提出了采用光电图像测量技术与传统光学实验相结合并在短时间内完成高精度的单缝衍射实验相关参数的测量方法,改进了传统光学实验的测量过程。依据该方法完成了单缝衍射实验,实验测量出单缝宽度的相对误差为2.5%,其测量的相对不确定为5.271×10-3。与相对误差为30%[3]的传统光学实验的测量相比较,采用本文提出的测量方法能使测量值更准确,并且减少了数据的采集和处理所耗费的实验时间,提高了实验效率和测量的精度。因此,采用本文所提出的实验测量方法实现了迅速、有效且高精度的测量,为实现传统物理实验的数字化提供了良好的思路和基础,预期可以在光学实验中推广使用。
