RTK 与数字测深集成技术在水下测量中的应用
2019-08-27庄培泳
庄培泳
(潮州市潮水水利水电勘测设计有限公司,广东 潮州 521000)
1 测量原理
Real-time kinematic(实时动态)实时差分定位技术主要依据载波相位观测,是GPS测量技术的新发展。RTK测量技术主要由基准站、流动站和数据链等组成,当前该技术已经在水下地形测量领域广泛应用。数字测深仪作为一种适用于江河、湖泊、水库等水深测量的便携式测深记录仪,在勘察、水文、航道和疏浚等领域测量和数据输出方面具有极大的应用前景,其所具备的DSP数据信号处理技术、水底追踪技术能够适应恶劣的水文环境,获取精确、真实、可靠、稳定的水声数据。通过在测船上使用RTK作业方式的GPS+便携机+数字测探仪的基本作业模式[1],便可完成水下地形测量以及水深等数据的自动采集。双频RTK定位具有较高的实时定位高程测量精度,故而能取代传统工序复杂的水尺布测水位观测方式。
RTK结合数字测深仪进行水下定位点高程的测量,首先应将RTK天线安装于测深仪换能器上方,确保测量时RTK测量点位始终与水下定位点处于同一铅垂线。测量时,测深仪在换能器测定底部坐标和高程的同时测定出定点水深,RTK测量高程H1减去测深仪测量水深H2后,即为水下定位点高程H,见图1。
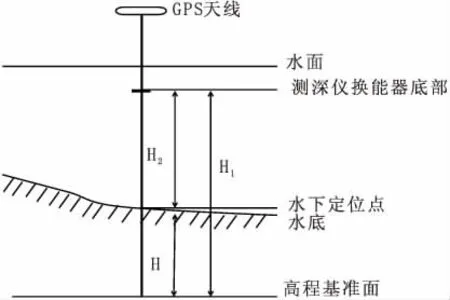
图1 水下定位点高程测量示意图
2 应用实例
2.1 工程概况
潮州市韩东新城防洪综合整治一期工程整治范围包括意东堤、东厢堤和韩江东岸市区段护岸(含北溪桥闸)。其中意东堤段北起意归公路,南至桥东水厂,全长约4.6 km;韩江东岸市区段护岸北起桥东水厂,南至北溪桥闸,全长约2.6 km;东厢堤段北起北溪桥闸,南至在建的潮州大桥,全长约2 km。本工程的任务主要是通过对意东堤、东厢堤实施达标加固处理,消除潜在的险情和隐患,达到50年一遇的防洪标准,通过远期与上游水库堤库的结合,防护区防洪标准提升至100年一遇,使堤围的防洪能力与未来韩东新城城市建设的定位相匹配。本工程主要进行南溪湖沉砂池西北角区域的水深测量,测量点设置在南溪湖水库一号水泵站内,测区水深13 m~19 m。
2.2 仪器配置及测量方案
2.2.1 仪器配置
本次对南溪湖沉砂池西北角区域的水深测量主要采用由北京宏畅航宇仪表公司所生产的定位精度±20 mm+2 ppm的华测X91双频实时动态定位RTK,测深精度为0.5%H的SDE-18南方数字测深仪,笔记本电脑,中海达测绘所推出的HyNav海洋测量工程施工定位及成图系列软件[2]。
2.2.2 测量方案
(1)平高系统和转换参数的确定
平高系统分别采用北京54坐标系及珠江高程基准,由于测区内控制点已经存在,无需再建控制网,利用已有点进行转换参数的求解。基准站设置在潮州市桥东的GPS-E级网的笔架山控制点,转换参数根据所设控制点求得,再将其余控制点设为检测点,进行数据比较。
(2)测船速度的确定
测船速度的确定对于测量结果的精确程度十分关键,船速过快则会降低点位坐标精度,影响水下地形测绘精度,船速过慢则必将增大数据量,加大数据处理难度。考虑到本工程实际情况以及RTK测量仪器采样率、测深仪信号传输的时延、水流流速等因素,最终确定能保证测点点位精度达到cm级精度的测船速度为2.0 m/s。
(3)测线宽度及测点距离的确定
同测船速度的确定相同的是,测线宽度和测点距离的选择同样影响水下测量的精度和工程量,根据工程测量实际情况和要求,测线的布设每隔10 m一条,数据点的采集每2 s一个。
(4)信号到达计算机相对时延值的确定
测船运行过程中时延值的存在将导致测点平面值和深度值匹配紊乱,影响到测量精度,所以,必须充分考虑到时延值的存在。RTK信号的时延值比测深仪信号的时延值小[3],所以上述误差主要由测深仪信号到达计算机的时延所引起,必须依据测点所处水深加以确定。
2.3 内业数据处理及成果的输出
将所收集并记录的水深数据导入Excel表格后进行RTK测量高程及所对应水深数据的处理,便可得出水底高程。将RTK平面坐标转换为所需的三维坐标(X,Y,H),并将测量数据转换为与HyNav海洋测量系列软件所匹配的数据文件,再运用HyNav海洋测量软件2.0进行数据处理并编辑成图。
3 精度分析
RTK数字测深成图误差既包括观测测船上RTK天线原定位置测定等人为方面的误差,也包括设备仪器制造精度、天气、风浪等环境方面的误差,甚至还包括起算数据、计算方法等方面的误差。这里主要讨论对测量成图精度影响较大的误差项。
3.1 风浪引起的误差
风浪的存在将引起测船左右晃动,GPS天线、换能器及测深仪的测定点很难位于一条直线上,为提升测量精度,必须明确测船的晃动程度,或者只能终止测量。对于受风浪影响较小的测点平面坐标误差可以忽略不计,主要讨论受风浪影响较大的水底高程误差。设测船摇晃瞬间的横向和纵向倾斜角度分别为 θr和 θp,GPS天线距离换能器的高度为 W,则天线高V=Wcosθrcosθp,当 θr=θp,且 V-W<0.1 m,θ<8°时,才能满足测量成图的精度要求。通常情况下,应在倾斜角度<6°的范围内施测。
3.2 RTK作业引起的误差
本工程运用华测X91双频实时动态定位RTK水下测量的检测精度见表1。
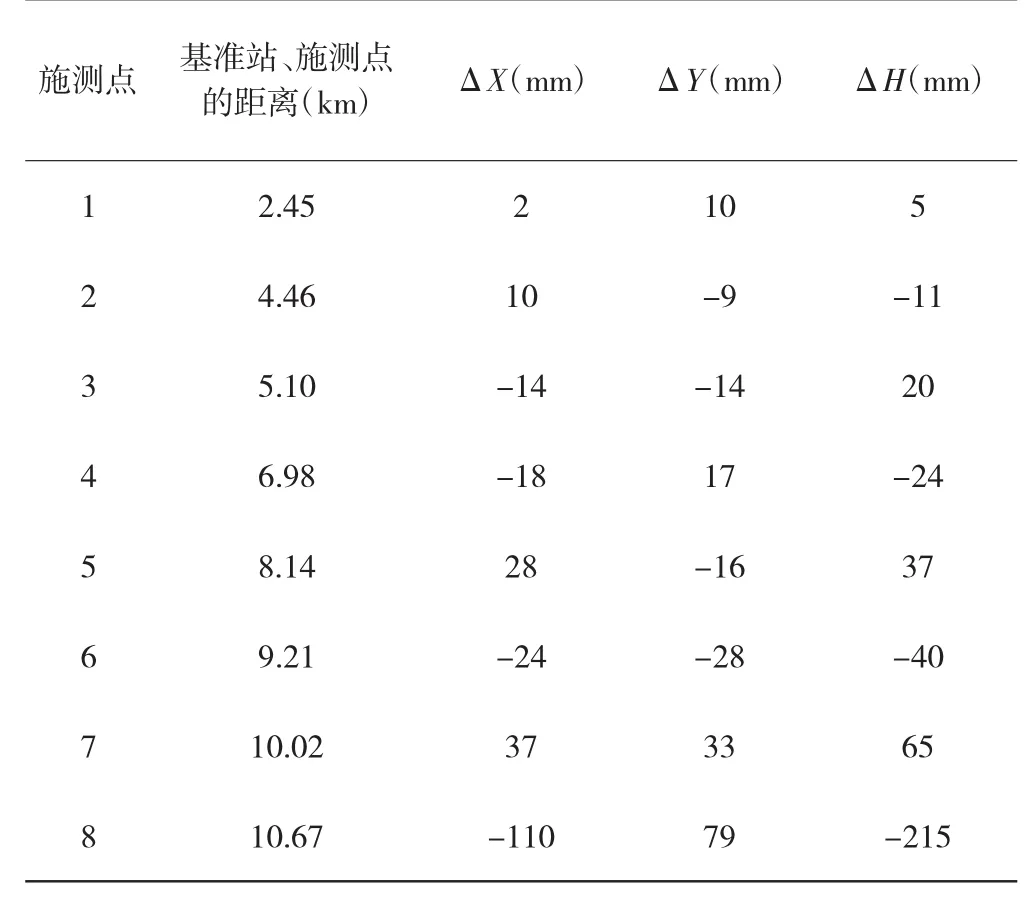
表1 RTK检测精度表
由上表结果可知,RTK与数字测深集成技术的测量精度主要受转换参数求解的起算点分布的影响,在运用四参数法求解转换参数的过程中,测量点位于求解转化参数的起算点以内区域,测量精度最高,且基本符合水下测量要求,对于10 km以内的测点,平面误差不超过0.45 m,高程误差不超过0.25 m。而测量点位于求解转化参数的起算点以外区域,随着测距的增大,测量误差增加,到10.6 km及以外时便无法达到水下测量精度要求,为此必须重新进行基准站设置和转换参数的计算。
3.3 测深仪引起的误差
引起测深仪误差的主要是仪器记录速度、分辨率等设计制造方面,电流扰动,水波气泡等原因,其中有些方面与水深无关,而有些因素与水深成正比,根据测深仪生产厂家所给出的标称精度,测深误差最大值mx=±0.3%H。
水温、盐度、富营养化、静水压力等都对水中声波的传播速度有一定影响[4],故对其的分析较为复杂,水声传播速度通常用下式计算:

式中:t表示水温,℃;s表示盐度,%;p表示静水压力。
由上式可知,随着水温、盐度和静水压力等的增大,水中声波的传播速度随之增大,其中水温是主要的影响因素。假定其余条件不变时,水温每变动1℃,声波的传播速度将变动4.5 m/s。而在声波的传播速度未作出测定的情况下,水声传播速率对测深影响的误差将高达1.5%H,综上可知,测深最大误差应设定为mz=±0.7%H。本工程南溪湖沉砂池西北角区域的水深测量中,最大水深18.5 m,则可求得测深最大误差mmax=±0.7%×18.5=±0.1295 m,这一精度基本满足水利工程水下测量要求。
4 结论及讨论
水下地形图测量中,RTK测量技术比常规测量具有较大优势:测量精度提高,施工复杂程度降低,常规测量无法完成的工作也得到保证。RTK数据处理和绘图软件系统有助于实现外业数据采集、内业数据处理、等高线生成、水下地形图绘制、图像输出等工作的自动化与高精确率,为水利工程方案决策、设计及实施提供依据。实践证明,RTK与数字测深集成技术应用于水利工程水下地形测量既能实现野外实时数据采集,保证地形数据的可靠性,又能进行数据的准确定性、定位与定量分析,导航性与同步性能良好,精度高,该项技术在今后水下地形测绘方面应用前景十分广泛。