跟踪服务机器人
2019-08-26王雁平林佩莹
王雁平 林佩莹
摘 要:本文设计了一款用于服务机器人的目标识别,目标跟踪模块;它由发送模块和接收模块组成;发送模块的任务是发送一个特征信号,接收模块通过接收到特征信号来判断发送信号的位置,提供运动平台运动方向信息,从而实现运动平台对目标的跟踪。
关键词:机器人;目标跟踪;目标服务;定时器
DOI:10.16640/j.cnki.37-1222/t.2019.23.083
1 引言
随着科技技术的发展,服务机器人逐渐走进人们的生活并逐步普及。服务机器人是机器人家族中的一个年轻成员,按其服务领域划分可以分为专业领域服务机器人和个人/家庭服务机器人,发达国家都非常重视服务机器人领域技术的发展,投重金研发;现在,这些机器人均处于不同程度的产业化阶段,有光明的前景。
在服务行业,用机器人取代繁琐的、重复性的劳动,已经成为市场的需求;目前世界上至少有48个国家在发展机器人,其中25个国家已涉足服务型机器人开发。在日本、北美和欧洲,迄今已有7种类型计40余款服务型机器人进入实验和半商业化应用在服务机器人领域。
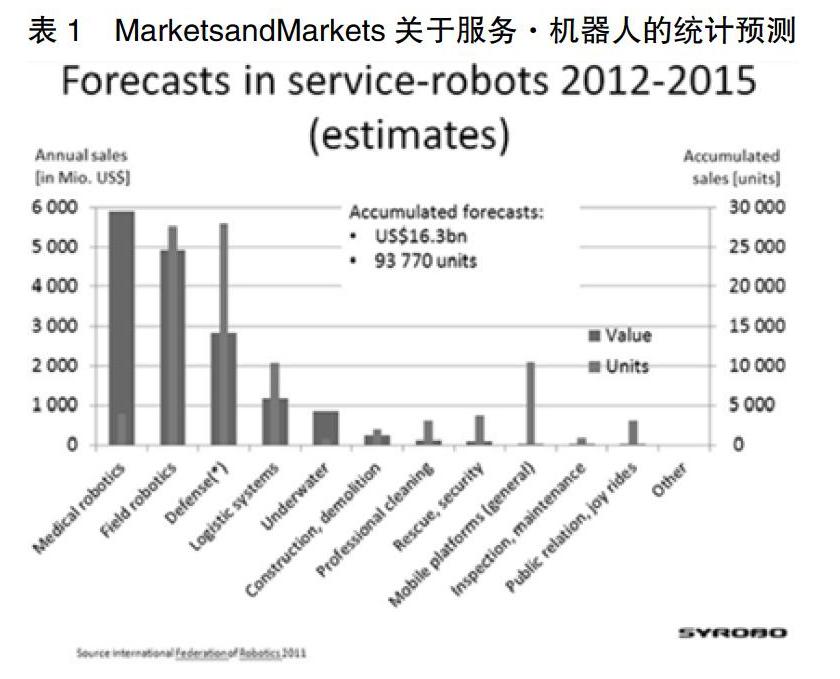
据国际机器人联盟IFR最新统计,全球服务机器人市场总值正以20%—30%的速度增长。据MarketsandMarkets预测,2012年-2017年全球服务机器人市场规模年复合增长率约17.4%,2017年将达461.8亿美元。服务机器人有望成为机器人领域最具潜力的增长点之一,参见表1。我国服务机器人尚处于研制测试阶段,形成产品或量产的服务机器人品种单一,技术水平较低;根据《中国制造2025》战略任务要求,统筹布局和推动智能交通工具、服务机器人、智能家电、智能照明设备和可穿戴设备等产品的研发和产业化。机器人方面,围绕特种机器人、医疗健康、家庭服务、教育娱乐、迎宾机器人、餐饮机器人等服务机器人应用需求,积极研发新产品,促进机器人标准化、模块化发展,扩大市场应用,已经成为相关工程技术人员的重要公关方向。
在服务机器人研发中,机器人的运动控制是服务机器人研发的主要内容,其基本的应用模块有室内导航,目标识别,目标跟踪,运动控制,运动平台等。
本文设计了一款用于服务机器人的目标识别,目标跟踪模块,主要适用于我们试制的一款跟踪机器人;它由发送模块和接收模块组成;发送模块的任务是发送一个特征信号,接收模块通过接收到特征信号来判断发送信号的位置,提供运动平台运动方向信息,从而实现运动平台对目标的跟踪。
2 特征信号发生器设计
发送模块:发送模块安装在被跟踪物上,作用是发送被跟踪目标的特征信号,是一个特征信号放发生器;发送的特征信号有多种选择;经过调研分析和实验比较认为使用超声波发生器和红外线发射管较为合适,这两种信号的特点是传输距离较远,容易接收,经济性好,对环境无影响。尤其是红外调制信号发送距离远,不易受外界环境影响。
2.1 特征信号发送电路设计
特征信号发送电路设计可以采用定时器设计方案和单片机设计方案,下面分别对两种设计方案进行设计说明。
2.1.1 定时器方案设计
电路如图1所示:由556双555定时模块构成两个振荡器,其中U1的振荡频率为40kHz,参选择为R1=1.8k;R2=1.8k;C1=0.01uF;C2=0.01uF;输出直接驱动红外发光二极管D1,3为限流电阻,选取应保证流过电流在30-100mA;保证发送距离(接收器能够接收到的)大于5m,限流电阻值选大一些为好。我们实选27欧,电流大约40mA。U2的振荡频率为1Hz,R5=72k;R6=72k;C5=10uF;C6=0.1uF;输出连到U1的控制端,U2的输出低电平时间UQ输出38kHz的调制脉冲,输出占空比为1:1。
2.1.2 单片机设计方案
特征信号发生器单片机方案选用STC08H04A10单片机作为信号发生器,它仅有8个引脚,售价不到一元人民币,却有很强大的功能,支持在线仿真,RS485和USB下载,内部集成一个高精度时钟(20MHZ可调)并可对外输出时钟及复位;集成了看门狗及复位电路;电源电压检测电路,I2C,SPI串行总线接口,最多能够直接使用5个IO接口;由于内部集成了时钟和复位电路,特征信号发生器电路十分简单,只使用一片STC08H04A10和2只电阻,一个三极管及1只红外发射管,电路(略),输出特征信号与前述555电路一样。程序也很简单,不再赘述。
3 目标识别模块设计
3.1 目标识别模块的构成
目标识别模块的主要作用是:搜寻目标,锁定目标,发出控制命令到运动控制模块;目标识别模块主要由三路红外接收器,步进电机,码盘,光电接收器和控制器等组成;扫描控制器与机器人运动平台控制器用串行接口连接,目标识别模块输出运动命令,平台控制器控制机器人运动。
3.2 目标识别模块的工作原理
红外接收傳感器选用三端集成红外接收器,它的内部电路有前置放大器,谐振放大器输出缓冲器组成;谐振放大器的谐振中心频率为40kHz;中心附近的信号得到放大加强,其他频率的信号衰减,因此有良好的抗干扰能力。输出端接到单片机的IO接口。为了能够快速准确的确定目标的方位,我们使用了三组红外接收器:左接收器,右接收器和中心接收器,安装在步进电机驱动的旋转云台,示意图参见图2。
跟踪过程描述如下:机器人首先要搜索机器人的位置;第一步,寻找目标;控制器驱动步进电机进行360度扫描搜寻目标,扫描到特征信号后转为小角度左右扫描,范围为±10度。第二步,索定方向;如果向右扫描,最右侧传感器接收到特征信号,继续向右扫描,直至左中右三个当左侧传感器都接受到信号;就锁定了目标;第三步,跟踪目标;驱动机器人的运动平台,向目标进发;在驶向目标的过程中,不断重复第二步核第三步,保证不丢失目标,同时通过运动平台的传感器探测运动路线上是否有障碍,距离障碍300mm时,机器人开始转向寻找新的路径,避开障碍;新的路径找到后,从第一步开始重新寻找目标,重复上述过程。扫描程序框图图3;控制电路设计及扫描程序设计将在另文介绍。
4 结束语
上述设计方案的特点是:(1)探测距离远,可以在15米半径内可靠搜寻到目标;(2)电路简单,可靠性高,电路成本也很低,易于上手制作;(3)可以作为机器人教学实验设备;(4)实用性强,尽管系统较简单,功能很实用,可以用于室内服务机器人,例如餐厅服务,送餐,结算,顾客引导,商场导购,病房服务等方面都有广泛应用。
参考文献:
[1]唐兵,杨中亚,王洪燕.服务机器人的室内定位研究及实现[J].机械设计与制造,2017(04).
[2]张凯渊,刘佩林,钱久超,裴凌.多传感器融合机器人室内定位系统设计与实现[J].信息技术,2014(11).
[3]郭彤颖.机器人传感器及其信息融合技术[M].化学工业出版社,2016.
