基于探地雷达的典型红壤区网纹红土层识别*
2019-08-24宋效东杨顺华吴华勇张甘霖
曹 棋 宋效东 杨顺华 吴华勇 张甘霖†
(1 土壤与农业可持续发展国家重点实验室(中国科学院南京土壤研究所),南京 210008)(2 中国科学院大学,北京 100049)
第四纪网纹红土(Plinthitic red earth,PRE)作为红壤关键带的重要组成部分,一般认为形成于距今0.85~0.40 Ma[1],是南方红壤普遍出现的下伏层次,也是第四纪环境研究的最佳信息载体[2]。网纹红土经历了强烈的风化成土和网纹化过程,质地黏重,孔隙形态以窄缝状为主,雨季降水不易下渗,地表径流常引起坡面冲刷,致使土层变薄,水土流失严重[3-6]。同时,网纹红土含有较多明显可见的白色网纹和红色基质,其所承载的生物信息明显不同,这对第四纪环境研究具有重要意义[7]。网纹红土层的存在影响着区域的水分循环和微生物群落的分布,主要表现为土壤剖面上的水分和微生物垂直分布特征。然而,以往有关网纹红土的研究多侧重土壤理化性质、地磁特征等方面,对于网纹红土的层次识别及分布情况的研究相对较少。此外,红壤各层次之间变化差异不明显,识别较为困难,传统的剖面挖掘和钻井勘探对土体具有破坏性,且费时费力,无法判别水平方向的变异,很大程度上影响了调查的范围和深度。因此,亟需一种快速、准确、无损的方法来研究红壤地区网纹红土层的分布情况。
探地雷达(ground-penetrating radar,GPR)是一种成熟且应用广泛的浅表层地球物理测量方法,该技术从19世纪70年代后期开始逐步应用于土壤学研究[8-10],如公路下面土壤层次信息探测[11]、 森林冻土层厚度及季节性变化研究[12]、基于探地雷达图像的土壤层次与砾石含量解译[13]、GPR与ERI技术相结合的碳储量估计[14]等。近年来,低频探地雷达技术已成为地球关键带科学研究的重要技术方案,能够定量反演不同气候带、土地利用、地形条件下关键带结构的特征及不同母质因素引起的差异[15]。关键带各结构层厚度与地下水深度的精准估算,取决于如何确定电磁波在介质中传播速度。目前,许多研究采用目标深度法来确定一个电磁波平均传播速度[16-17],从而根据电磁波的旅行时间确定目标体深度,但是该方法的不确定性较大。共中心点法(CMP)虽然能较为准确地计算电磁波传播速度,但是土壤的复杂性与高信号衰减亟需更准确的垂直维电磁波传播速度模型。
鉴于此,本研究以红壤丘陵区流域为研究区域,采用共中心点法与剖面法相结合的方法对探地雷达图像进行校准,解译获得网纹红土层深度,最后与钻井及土壤含水量结果相互验证。相关结果有助于为流域内水文、生态、地质、农业研究提供基础数据,从而服务于当地的农业种植结构及经济发展。
1 材料与方法
1.1 研究区概况
研究区位于江西省鹰潭市余江县孙家流域,流域面积为50.5 hm2(图1a)。流域内的坡度大约为6°,海拔高度介于48.1~66.9 m。平均年降水量约1 789 mm,年平均气温和无霜期分别为17.6 ℃和258 d。研究区的母质为第四纪红黏土和红砂岩。流域内水田和旱地不同土层的性质见表1,从均质红土层到风化层,黏粒含量逐渐增加,砂粒含量逐渐减少。
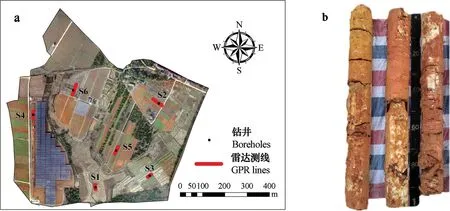
图1 研究区域测线示意图(a)和所取岩芯的典型网纹红土层(b)(从左到右为1~4 m岩芯)Fig. 1 Map of boreholes and GPR surveying lines location (a) and typical plinthitic red earth layer (b) of which drill cores were extracted
1.2 土样采集与分析
在研究区域内共布设6个钻井,钻井深度至基岩,以期完全识别网纹红土层。流域内基岩深度在8~10 m内,钻井所取岩芯均可观察到土壤的分层情况,从上至下依次为:黄棕色土层或均质红土层、网纹红土层、风化层、基岩。本文将在黄棕色土或均质红土层之下刚出现青灰色网纹发育的界面定义为网纹红土层上边界,网纹由稀疏→密集→稀疏,直至网纹逐渐消失,其下便是风化层,这一界面则定义为网纹红土层下边界(图1b)。大部分土壤固相的相对介电常数为4~9,空气的相对介电常数为1,然而水在20 ℃下相对介电常数为80。因此,非饱和土壤的相对介电常数主要依赖于土壤含水量。介电常数的变化会引起电磁波速度较大的变化。当上下土层的土壤含水量差异大或者存在裂隙水时,由于电性差异大,雷达图像上会形成强反射波。因此,土壤垂直剖面上的水分变化可以表示电性差异的变化,从而间接验证土壤层次的分布。
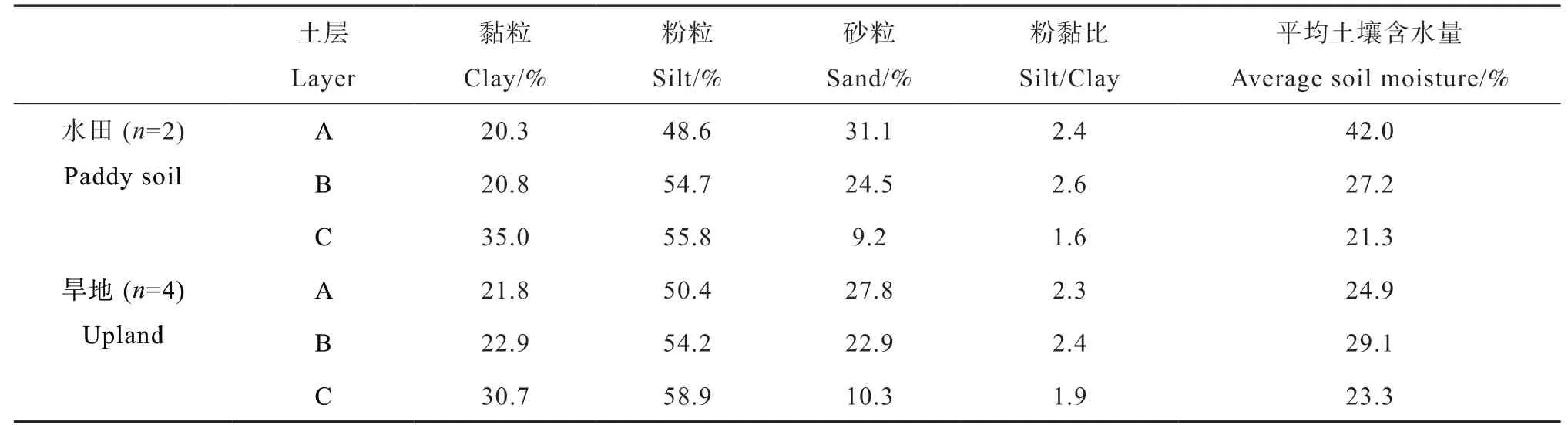
表1 不同土层的基本性质Table 1 Basic soil properties relative to soil layer
由于钻机取出的1 m内土样松散且破碎,本实验在钻井旁开挖1.2 m深的土壤剖面进行取样。1.2 m以下土样则在岩芯中采取。取样方法为:0~1 m每隔10 cm取样;1~5 m每隔20 cm取样;5 m以下每隔50 cm取样。样品均装入密封袋,带回实验室测定理化指标。本实验采用烘干法(103~108 ℃,10 h)测定土壤含水量,所获得数据均表示深度中值的含水量;激光粒度仪法测定土壤颗粒组成[18]。
采用Excel 2017进行数据基本描述特征分析,Origin 8.6进行绘图。
1.3 探地雷达测量与检验
本实验使用的探测设备是瑞典Geoscanners公司AKULA-9000C地质雷达,对六个钻井进行三种天线频率探地雷达调查,测线长度根据地形设定(图1a)。实验采取了两种测量方法:①剖面法。剖面法的测量结果可以用雷达旅行时间剖面表示,由此获得土壤剖面结构。对同一测线进行200 MHz、120 MHz和60 MHz三种不同频率天线的雷达测量,雷达天线均为收发一体式,采样模式为距离触发模式。②共中心点法。此方法应用不同天线距的发射和接收天线对在同一测线进行重复测量,天线为两个60 MHz收发分离式天线,采样模式为点测,采样间隔为5 cm。电磁波在红壤中的传播速度v根据式(1)得到:
式中,v为土层电磁波传播速度,天线间距为x
1
时,t
1
为对应的土层界面反射波双程旅行时间;天线间距为x
2
时,其对应的时间为t
2
。电磁波的传播速度获得后,便可根据式(2)求得深度:

式中,H为土层深度,t为电磁波到达各反射层的双程旅行时间。
雷达数据使用“REFLEXW 8.5”软件处理,处理步骤如下:(a)Dewow滤波,去除直流漂移;(b)静校正,去除空气波;(c)自动增益,获得深部信号;(d)背景去除,使得水平带状信号减弱;(e)1D带通滤波,去除高频和低频噪声;(f)滑动平均。
垂直分辨率决定了探地雷达不同频率天线分辨最小异常介质的能力。通常,垂直分辨率约为所使用天线波长的1/4。当假定电磁波的平均速度为0.06 m·ns-1时,60 MHz、120 MHz、200 MHz天线的垂直分辨率分别为25 cm、12.5 cm和7.5 cm。由于电磁波在土壤中传导受含水量的影响较大,当土壤表面积水或土体含水量较多时,水分会对电磁波的传播产生衰减作用,从而不利于电磁波的穿透[19]。因此,GPR测线实验于2018年1月旱季进行。
2 结 果
2.1 钻井分布及岩芯分层特征
本实验布设了六个钻井点(表2),分别位于两种不同的土地利用类型上:钻井S1、S3位于流域内的水田,相比较S3钻井而言,S1钻井有长达数十年的耕作历史,人为扰动程度及淹水年限高于S3;钻井S2、S4、S5、S6同为旱地。S1位于流域内的最低点,海拔为50.8 m。然而,最高点S4的海拔为61.8 m。为了尽可能地记录整段网纹红土层,每个钻井的深度均到达红壤基岩面,S1~S6钻井深度依次为6.0、8.2、8.5、1 0.4、7.1 和30 m。

表2 钻井及典型探地雷达测线基本信息Table 2 Basic information of the boreholes and GPR surveying lines
2.2 水田钻井探地雷达图像解译
探地雷达能够探测到土壤与基岩的分界面,从而获取土层厚度。然而,本实验更加关注土壤各层次间的探测,如红壤地区网纹红土层的上下界面。图2a为鹰潭孙家流域老水田的自然景观。1月正好是在水稻收获之后,且排涝搁置数月,田内无积水,不影响探地雷达的应用。测线总长16.2 m,在水平位置6.5 m处有一地质钻井S1,岩芯显示该处地层剖面为:0~0.9 m为均质红土层;0.9~3.1 m为网纹红土层;3.1~5.0 m为风化层;5.0 m以下则为基岩。图2b显示,土壤含水量在土壤深度剖面上呈先减少后增大再减少的“S”型变化趋势。S1钻井平均土壤含水量为29.31%,0~0.9 m表层土壤含水量逐渐降低。在网纹红土层内,土壤含水量从上至下变化较大:网纹红土层上界面土壤含水量为20.78%,到达下界面时,含水量逐渐增大至32.61%。同样,3.1 m之后平均土壤含水量逐渐减小至16.97%,这是因为3.1 m后便是风化层;5.0 m后是基岩,含水量降至7.42%,该深度土壤几乎不透水。

图2 S1钻井自然景观(a)和土壤含水量剖面图(b)Fig. 2 Natural landscape of Borehole S1(a) and distribution of soil moisture content in the soil profile (b)
为了获得电磁波在不同深度土壤中的传播速度,本实验在S1、S3钻井处分别进行CMP探测。由CMP雷达剖面图像(图3)可知,随着天线间距的逐渐增加,空气波、地表波和反射波的旅行时间也随之增加[20]。使用“REFLEXW 8.5”软件进行速度拟合便可以得到各深度的电磁波传播速度。拟合得到的一维速度模型表示S1钻井处电磁波传播速度从1.12 m的0.056 m·ns-1至3.78 m处0.042 m·ns-1的转变,S3钻井处电磁波速度先从0.068 m·ns-1减少至0.053 m·ns-1,再增加至0.06 m·ns-1。
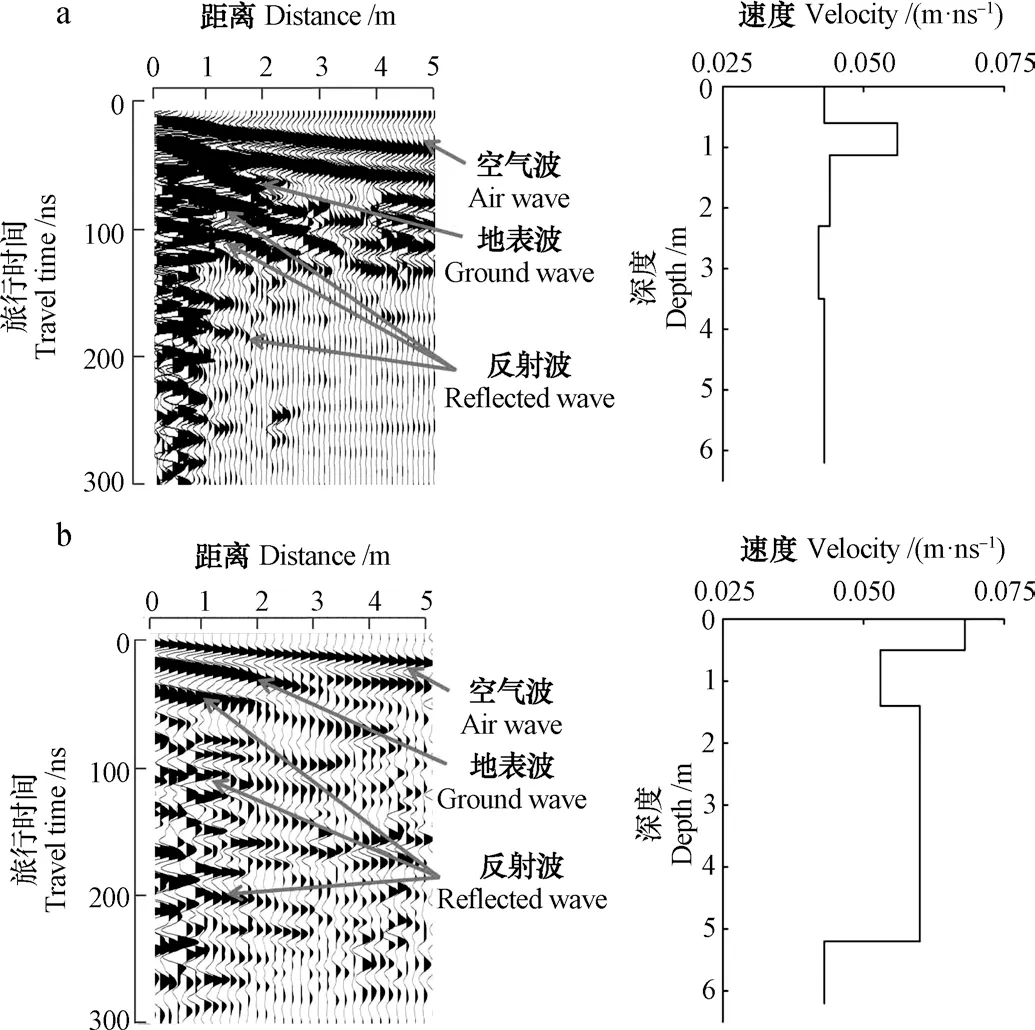
图3 S1(a)和S3(b)钻井CMP雷达剖面图像和1D速度模型Fig. 3 CMP radar images of the profiles of boreholes S1 (a) and S3 (b) and 1D velocity model
同时,剖面法探测在水田同一测线上进行。本实验利用60 MHz、120 MHz和200 MHz三种频率的雷达天线进行探测,以期获得不同深度的土壤剖面信息。图4a为S1钻井60 MHz探地雷达剖面图:水平坐标为测线距离;左侧垂直坐标为雷达波双程旅行时间,表示雷达波从发射天线出发向下传播经过地下土壤然后反射回到接收天线所经历的时间;右侧垂直坐标为深度,该深度值由CMP获得的速度和单程旅行时间计算得到。由图4a可知,在170 ns处电磁波的振幅有明显变化,可解译为一个反射层面,这是网纹红土层与风化层之间存在着明显的介电常数差异导致的。同时,65 ns处也显示有连续的同相轴,该处为均质红土层与网纹红土层的交界面。网纹红土层的黏粒含量、含水量等均不同于均质红土层,因此在交界面处产生明显的反射波。值得注意的是,60 MHz探地雷达图像还能分辨出基岩界面和地下水位。雷达探测结果显示,地下水的深度为8.4 m,这与实际情况非常符合。图4b为S1处120 MHz非屏蔽天线雷达剖面解译图像,从电磁波振幅与频率的变化中,可以清晰地发现网纹红土层上、下界面的反射层特征分别在62 ns和170 ns处。这与60 MHz天线雷达图像的解译结果相同,但仍存在着一些差异。这是因为不同频率的天线,分辨率不一样。200 MHz天线拥有7.5 cm的垂直分辨率,雷达能够更清晰地分辨地层中的信息。从图4c中观察发现,在测线距离8.5 m和12 m处,有两道双曲线杂波,这是由根系引起的。在布置测线时应尽量避免砾石和根系,产生的杂波会影响深层次的信号。同时,在60 ns左右处有连续的同相轴,这是网纹红土层的上界面。该结果与60 MHz和120 MHz天线雷达图像的结果一致,但更为清晰、准确。从图4e~图4f可以发现,S3处雷达图像在60 ns和160 ns附近出现明显的连续强反射波。
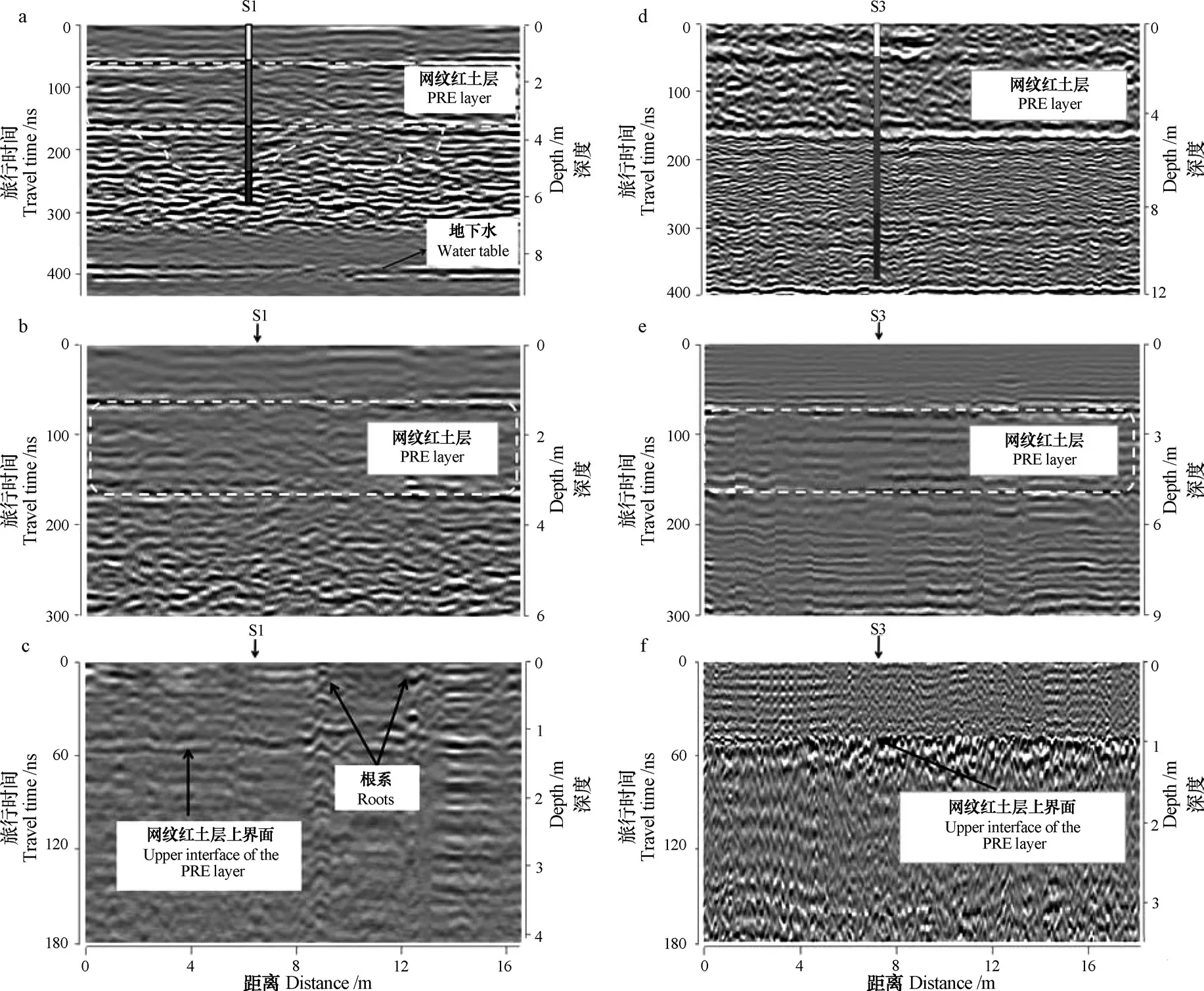
图4 S1、S3钻井60 MHz(a、d)、120 MHz(b、e)和200 MHz(c、f)天线雷达剖面解译图像Fig. 4 GPR image-based interpretation of the profiles of borehole S1 and S3 with the radar working on 60 MHz (a & d), 120 MHz (b& e) and 200 MHz (c & f) respectively
2.3 旱地钻井探地雷达图像解译
S5、S2钻井不同于S1钻井,土地利用类型为旱地,种植作物为花生。在雷达测试时期,花生已收获,而且土地进行翻耕,表层没有杂草,有利于田间操作。在钻井附近进行了剖面法雷达测试,其中包含了60 MHz、120 MHz和200 MHz三种频率的雷达天线。此外,CMP测试也同步进行,用于估算电磁波在红壤旱地中的传播速度,并最终获得一维速度模型。岩芯显示S5钻井处地层剖面为:0~1.4 m为均质红土层;1.4~4.1 m为网纹红土层;4.1~7.1 m为风化层。S5钻井的平均土壤含水量为28.54%。土壤含水量在深度剖面上变化明显,图5b显示0~1.4 m土壤含水量逐渐增加,这与水田S1钻井土壤含水量的变化趋势相反。在1.4 m之后土壤含水量逐渐增大,网纹红土层内土壤含水量平均值为29.1%;4.1 m之后为风化层,土壤含水量降至23.52%。一维速度模型显示电磁波传播速度从表层的0.07 m·ns-1转变至风化层的0.051 m·ns-1。
由剖面法测线可知,S5钻井处60 MHz雷达剖面在70 ns、170 ns、330 ns处有明显的反射层信号,且同相轴在一条直线上。经过时间深度函数转换后所对应的深度分别为1.65 m、4.8 m和8.4 m。200 MHz雷达天线用于精准探测网纹红土层的上边界,图7c显示网纹红土层的上边界为75 ns,转换后的深度为1.76 m。S2钻井与S5钻井基本情况相似,60 MHz雷达图像显示的网纹红土层上下界面的深度分别为1.4 m和4.8 m(图7d),上界面的探测效果较差,200 MHz雷达图像则显示上界面深度值在0.95 m附近,较符合实际情况。

图5 S5钻井自然景观(a)和土壤含水量剖面图(b)Fig. 5 Natural landscape of borehole S5 (a) and soil moisture content with depth (b)

图6 S5(a)和S2(b)钻井CMP雷达剖面图像和1D速度模型Fig. 6 CMP radar images of the profiles of boreholes S5 (a) and S2 (b) and 1D velocity model
2.4 不同频率的雷达解译精度
研究表明60 MHz、120 MHz和200 MHz雷达天线的有效探测深度分别为9 m、4 m和2 m[21]。为了更加准确地获得网纹红土层的厚度,本实验采用组合天线的方法,即使用200 MHz和60 MHz天线分别进行探测,获得网纹红土层上、下界面的深度。本实验将六个钻井所观察到的网纹红土层上、下界面的深度值与雷达探测值进行线性拟合。其中,由于200 MHz天线雷达的采样时窗设置为180 ns,部分测线无法识别网纹红土层的下界面。因此,只将60 MHz(n=12)和120 MHz(n=11)天线数据进行拟合,并与组合天线方法拟合的结果进行对比。
由图8a可知,虽然120 MHz天线和60 MHz天线均可以识别出网纹红土层的上下界面,但60 MHz雷达探测的结果优于120 MHz雷达探测的结果。此外,组合天线方法拟合的方程斜率为0.99,R2为0.97,这表明组合天线方法探测的结果更接近于真实值。相比较于60 MHz和120 MHz单天线测量的方法,组合天线的方法使得网纹红土层的深度探测结果更加准确。此外,将使用60 MHz天线和组合天线雷达探测获得的网纹红土层厚度值进行线性拟合(图8b),发现组合天线数据拟合的结果(R2=0.94)优于60 MHz天线数据拟合的结果(R2=0.81)。组合天线雷达探测获得网纹红土层厚度的平均相对误差为6.8%。

图7 S5、S2钻井60 MHz(a,d)、120 MHz(b,e)和200 MHz(c,f)天线雷达剖面解译图像Fig. 7 GPR image-based interpretation of the profiles of borehole S5 and S2 with the radar working on 60 MHz (a & d), 120 MHz (b& e) and 200 MHz (c & f)
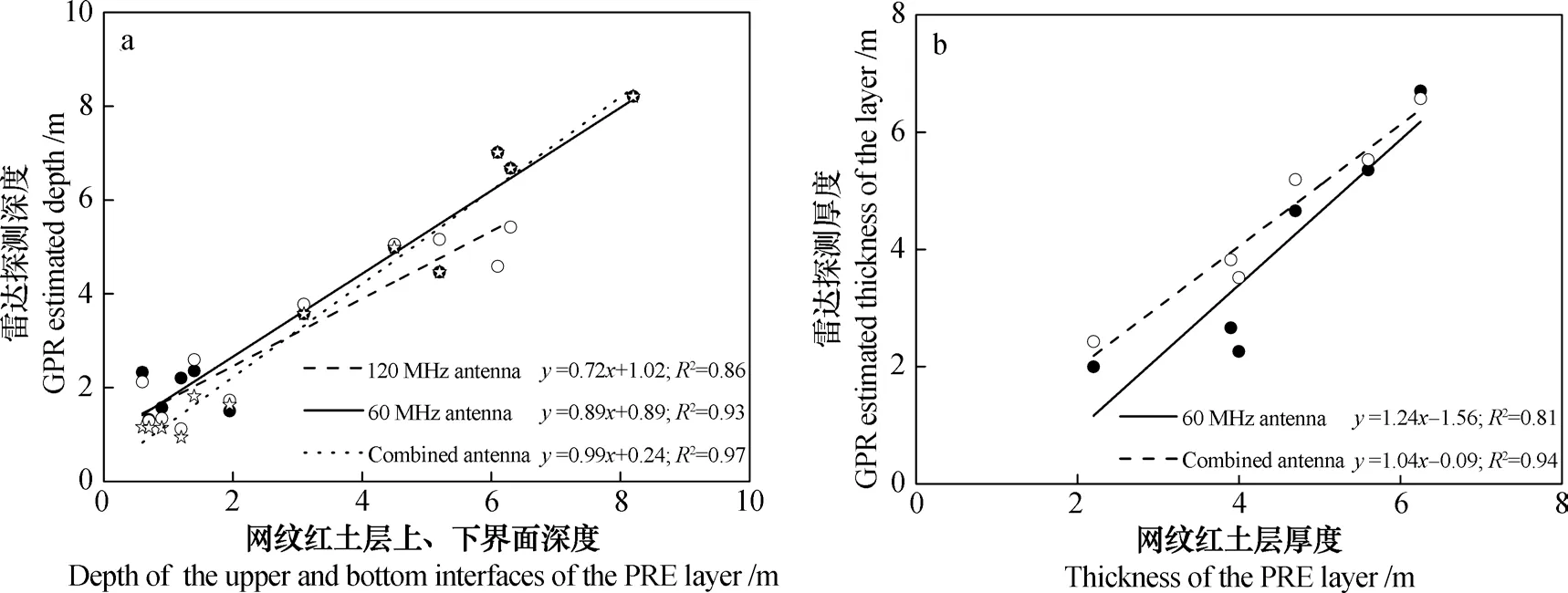
图8 不同雷达天线组合方法探测精度对比Fig. 8 Comparison between GPRs different in antenna combination in detection accuracy
3 讨 论
探地雷达电磁波波速的求取包括已知目标深度法、点源反射体法、层状反射体法、共中心点法等。本研究采用共中心点法获取电磁波在不同深度土壤的传播速度。土壤含水量越大,介电常数越大,电磁波传播速度越小,这与已有的大多研究一致[22-23]。探地雷达的电磁波传播速度与土壤含水量、黏粒含量、盐分含量等性质密切相关。不同层次间的土壤含水量出现明显的变化,电磁波传播速度也随之变化。土壤含水量在深度剖面上呈现一定的规律性,大致表现为网纹红土层内逐渐递增,至网纹红土层下界面出现最大值,风化层以下土壤含水量随着深度增加不断减小(图2b,图6b)。在均质红土层内,电磁波在旱地的传播速度平均为0.07 m·ns-1,远大于电磁波在水田中的传播速度,这可能与水田在均质红土层的土壤含水量高于旱地有关。电磁波在网纹红土层的传播速度在0.052 m·ns-1~0.065 m·ns-1之间,平均速度为0.058 m·ns-1。网纹红土层的平均土壤含水量为28.95%,高于风化层及基岩的平均含水量。实验证明,当上下土层之间的土壤含水量变化较大时,相对介电常数差异明显,导致电磁波传播速度的变化,最终在雷达图像上形成强反射波。土壤垂直剖面上的水分变化可以表示电性差异的变化,从而间接验证土壤层次的分布。然而,关于南方红壤地区电磁波传播速度与土壤黏粒含量、土壤含水量等性质之间的定量关系有待进一步研究。
研究表明探地雷达天线频率越低,探测深度越大,分辨率越低[24]。本研究采用三种频率的雷达天线对同一测线进行试验,表明200 MHz雷达天线的有效探测深度低于120 MHz和60 MHz天线的有效探测深度。使用200 MHz天线获得的雷达剖面图像能探测到网纹红土层的上界面,部分钻井下界面则超出了探测范围。但是,200 MHz雷达天线的分辨率远远高于其他两个天线,不仅能够发现土体内较大的根系或砾石,而且能够准确地观测到同相轴的变化(图4d,图7d)。中心频率为60 MHz的雷达天线能够探测大约9 m深,能够整体地反映红壤的结构,包括均质红土层、网纹红土层、风化层和基岩(图4a,图7a)。当地下水位较低时,60 MHz天线雷达亦能探测至地下水位(图4a)。
此外,大多数研究[12,25]仅使用单频率天线雷达进行厚度预测,然而本实验采取组合天线的方法对网纹红土层进行厚度预测,提高了探测的精度。网纹红土层在垂直方向上通常较深,但120 MHz的有效探测深度大约为4 m,如若网纹红土层下界面深度超过4 m,则120 MHz天线的探测精度大幅下降。单频率天线的探测方法可能并不能满足所有测线的探测要求。由图8a可知,120 MHz天线的界面深度拟合结果R2为0.86,低于60 MHz与组合天线的拟合结果。组合天线的方法更适合于网纹红土层的深度探测,能够极大地提高探测准确度,平均相对误差由16.2%缩小至6.8%。综上所述,利用200 MHz和60 MHz天线能够较为准确地获得网纹红土层上、下界面的深度,进而识别网纹红土层厚度。
4 结 论
由于红壤各层次之间存在着介电常数差异,这使得探地雷达成为识别红壤地区网纹红土层的有效手段。通过探地雷达图像与钻井观测、室内含水量分析等多种数据相结合,可以对网纹红土层进行快速、准确识别。60 MHz和120 MHz天线均能够较为准确地划分网纹红土层上、下界面,确定网纹红土的分布情况。但是由于雷达的探测深度与分辨率成反比,导致60 MHz和120 MHz天线对于均质红土层与网纹红土层的交界面探测效果较200 MHz天线的效果差。同时,对于网纹红土层深度的准确估算,采用组合天线的方法,即200 MHz和60 MHz天线分别获得网纹红土层上、下界面的深度结果,要优于60 MHz、120 MHz单天线方法。相比较于土壤剖面开挖、土钻等传统土层厚度调查,探地雷达技术的应用将大大缩减野外工作量。如若能有效结合空间预测方法,将有力推进土壤三维变异研究的发展。