基于超声图像的PICC智能穿刺系统的设计与实现
2019-08-20郭克友王凯迪贾海晶
郭克友,王凯迪,贾海晶
北京工商大学 材料与机械工程学院,北京 100048
引言
在临床上,为了减轻患者反复扎针的痛苦,目前广泛采用的是静脉留置针的方式。手动穿刺置管术中,穿刺成功率主要依靠护士眼观以及手摸来确定穿刺靶向血管,预估穿刺位置和进针角度,然后进行手动穿刺。传统的操作方法是按照正常解剖位置定位而进行的盲目穿刺[1]。以经外周静脉穿刺中心静脉置管(Peripherally Inserted Central Venous Catheters,PICC)为例,传统的PICC 穿刺常使用直径较粗的穿刺针经肘部贵要、肘正中或头静脉植入,存在成功率低或置入困难等问题。1997 年,静脉超声引导下施行改良Seldinger 的PICC 置管被提出,与传统的PICC置管技术相比,采用超声定位标记进行穿刺[2]。在超声引导下通过颈内静脉行PICC 置管术与以往方法相比较优点突出。既往的多行常规中心静脉置管一般由医生操作,依据解剖标志盲探,置管失败率>19%[3]。超声图像的引入一定程度上解决了血管条件较差的穿刺问题。在超声引导下的静脉穿刺置管,将盲穿改为视穿,但是并没有完全摆脱操作人员的经验、操作技术水平、情绪等因素对于穿刺成功的影响。在战地营救、重症抢救等需要迅速穿刺成功的情境下,超声引导下的静脉穿刺置管的一次成功率同样得不到保障。与此同时,对于老人、孩子以及其他一些血管条件不好的患者,光凭人眼的分辨很难从超声图像中准确找到目标血管,对于穿刺成功亦造成了很大的影响,因此人工操作超声引导下的静脉穿刺置管,在临床实施中的一次穿刺成功率不能够充分满足各种情境、各种血管条件的需求。
近年来有研究表明,在静脉超声图像引导下,如果能准确掌握静脉与穿刺针的相对位置和静脉管径的大小,便可确定合理的穿刺路径,进一步驱动机械手进针即可实现自动静脉穿刺,为成功建立静脉通路奠定基础[4]。在国内,2016 年李桌等人设计了一种通过红外成像和压力变化来识别和穿刺血管的方法以及装置[5];2017 年由张建英[6]设计了一种用于白血病患者化疗的PICC 静脉置管智能控制操作仪,包括移动操作装着、自动穿刺装置、定位导航装置、主控监测装置和辅助固定装置。
在国外的研究中,Kobayashi 等[7-8]研发设计了针插入手术机器人,结合力感测和超声成像用于中心静脉导管插入术中。Tanaka 等[9]在双侧控制系统中结合视觉图像位置信息和力信息,用以在内窥镜手术机器人中实现触觉反馈。Balter 等[4]于2015 年首先设计并研发成功了7 自由度引导静脉穿刺机器人系统,该套系统基于超声图像处理,穿刺机器人包括一个3 自由度机架,用于对患者的外周前臂静脉进行成像,还有一个小型化的4 自由度连续臂,用于在闭环控制下将插管引导到选定的静脉。在两年之后,该团队又在原有穿刺机器人的基础上,改进设计了智能医疗机器人穿刺系统,采用红外成像和超声成像技术对合适的注射部位进行扫描和检测,并在图像和力反馈的基础上,采用9 自由度机械臂进针插入血管的中心[10]。许多研究小组已经在使用机器人系统,在经皮外科手术治疗期间进行了临床试验研究[11-15]。
上述的研究成果,都是在实验室情况下设计研发的智能穿刺置管机构,机械结构复杂,操作繁琐,在战地营救、野外急救等非实验室的情况下,很难使用上文中所述的研究成果。因此,为了提高静脉穿刺置管手术实施过程中的穿刺成功率,本文提出了一种结构简洁、操作简单,可用于多种场合的PICC 智能穿刺置管系统的解决方案,经过在人体模型上的试验统计,该系统的一次穿刺成功率在98.78%,远大于PICC 穿刺置管术的人工操作一次穿刺成功率。
1 总体设计方案
实现自动穿刺机的研究主要有两大部分,其一是利用图像处理算法从静脉超声图像中获取靶向血管的深度和半径,以此推导出靶向血管中心在空间坐标系中的位置;其二是根据设计的进针机械结构的形态特征信息,以及靶向血管在空间坐标系中的位置信息,驱动机械臂完成穿刺动作。
1.1 系统总体设计
对于智能穿刺置管系统的硬件结构,本文采用模块化的设计方案,依据系统目标功能将其划分为各个部分,每个部分具有独立的功能,通过相适应的几何接口和通信协议连接,方便拆卸和替换。系统总体结构如图1 所示。机械结构包括自动穿刺装置、定位支撑架和超声探头。其中,自动穿刺装置由进针电机、调整角度电机、穿刺引导架以及其他的一些连接零部件组成。自动静脉穿刺装置应用双电机丝杠螺母传动方式,进针电机推动穿刺针和软管穿刺皮肤进入血管,角度电机用来调整推动软管到达该深度对应的角度值。
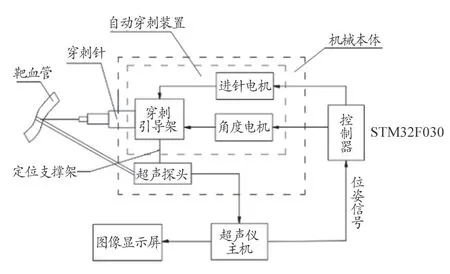
图1 系统总体结构图
1.2 系统工作原理
本研究中的智能穿刺系统,由操作者手持超声探头进行操作,与目前在医院中广泛应用的超声引导下的静脉穿刺置管术的操作方式相同。操作者手持超声探头,在患者的手臂上寻找靶向血管,并通过显示屏观察超声图像,依据图像信息判断血管条件是否合适。与之不同的是,应用本研究中的智能穿刺系统,当检测到图像中存在合适的靶向血管的时候,智能穿刺系统通过一个触发按键计算靶向血管的深度和半径,并依据此信息,进一步计算出靶向血管在空间中的位姿信息,之后根据该位姿信号,计算得到PWM 脉冲数。控制器STM32F030 接收到PWM 脉冲信号,经过智能步进电机驱动芯片TMC260 分别控制进针电机和角度电机有序运动。角度电机用以调整穿刺角度,当进针电机导轨的倾斜角度达到预设值的时候,角度电机停止,进针电机开始运行,当进针深度达到设定值的时候,进针运动停止,完成穿刺动作。之后进针电机反转,按原路径长度返回,将PICC 软管留置在靶向血管内,完成置管动作。最后角度电机反转,回到初始位置停止。
1.3 机械结构设计
本研究中的智能穿刺装置采用外平面穿刺的方式,工作平面与超声引导下的人工穿刺置管平面一致,均为垂直于超声探头的最大截面的中分面,穿刺装置机械结构示意图如图2 所示。这种设计的优势首先在于保持了原有PICC置管手术的操作流程,医护人员不需要再经过特殊的训练就可以顺利操作;其次,采用外平面的穿刺方式,大大简化了血管在空间中位姿信息的计算量;本研究中紧凑的机械结构设计使得本系统的应用场景更加广泛。
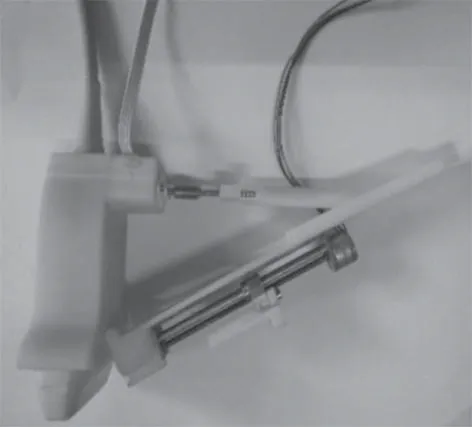
图2 穿刺装置机械结构图
2 运动模型分析
本文中提出了一种靶向血管在空间中位置信息和形态信息的计算方法,并依据这两种信息,完成穿刺动作的路径规划。图3 所示即为智能穿刺系统数据转换的流程图。
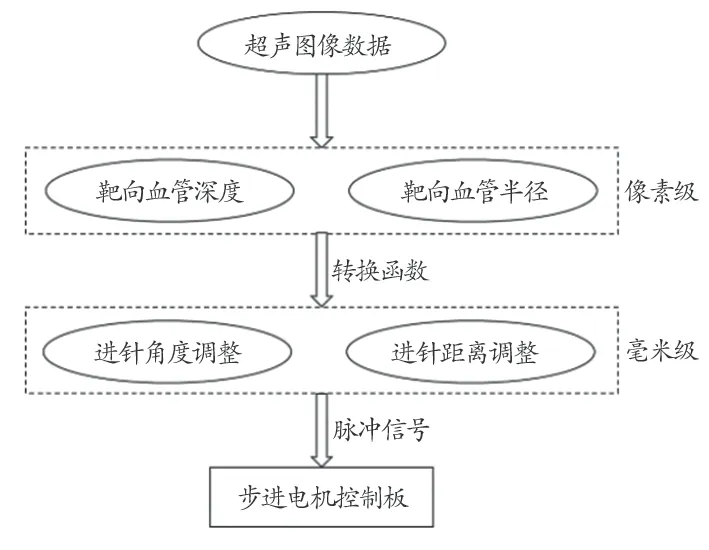
图3 智能穿刺系统数据转换流程图
2.1 获取靶向血管在空间中的位置信息
图4 为超声引导下静脉穿刺置管手术的工作平面示意图。超声探头与皮肤表面接触,其中点A 位于探头最大截面的平面,A 点为超声探头平面中点。A、C 两点均在皮肤表面,B点为血管中心位置,直线AB垂直与皮肤表面。因此,机构的穿刺置管运动为二维平面运动,在工作平面上建立平面直角坐标系,以A 为坐标原点,射线AB 为y 轴正半轴,射线AC 为x 轴正半轴。通过对B 超图像的处理分析,可以得到B 点的深度为h,即线段AB 的值,由此得到B 点在工作平面中的坐标为(0,h)。

图4 超声引导下静脉穿刺置管手术的工作平面示意图
在确定了工作平面以及B 点的坐标之后,为简化进针机构的设计,本研究中把留置针的运动轨道固定在工作平面上。即在图4 的状态下,BC 线段所在直线为留置针运动的轨道,C 点为进针位置的起始位置,线段BC 的长度为进针的距离。由于进针运动的平面固定不变,进针机构的位姿调整只需要有两个自由度,其中一个自由度用来调整进针位置C 的坐标,另一个自由度用来完成沿射线CB 的进针运动,进给量为线段BC 的长度。本文中设线段AB长度H,线段AC 长度L,且H 与L 之间,存在函数关系,设其函数关系为f (x),则:

进给量线段BC 的长度La,可由勾股定理求得,即为:

得到L 和La 的值之后,需要将两个值发送到核心控制板,核心控制板将两个数值转化为步进电机的驱动步长,完成穿刺动作。
2.2 穿刺路径规划
在图4 中线段AB 长度H,线段AC 长度L,且H 与L 之间,存在函数关系f (x),AB 的长度可以通过超声图像处理算法得到,L 为最终要确定的进针量,所以需要得到函数关系f (x)。由于通过机械结构的几何推导不能够直接得到两者之间的精确关系,因此本文中采用曲线拟合的方式得到函数表达式。
由超声图像的处理可以得到靶向血管的半径R,以及圆心在图像坐标系中的像素坐标(px,py),由于超声图像采集的深度和图像纵向像素长度可知,故而可以得到每个像素点对应的实际长度值,设其值为α,单位为毫米每像素,所以在图像坐标系中的像素坐标转化为实际长度坐标为:

将上式转化为齐次坐标为(x,y,1)。
以皮肤表面建立空间坐标系(图5),依据超声平面的中心点建立空间直角坐标系,其中O 点为超声探头平面的中心点,x 轴和y 轴位于工作平面上,且y 轴垂直于超声探头平面。通过坐标变换矩阵可以由靶向血管中心在图像坐标系中的齐次坐标转换为空间坐标系中的坐标,设靶向血管在空间坐标系中的坐标为(lx,ly,lz),则可得到转换公式(4),其中h 的值即为靶向血管的深度,与靶向血管圆心的纵坐标值相等。
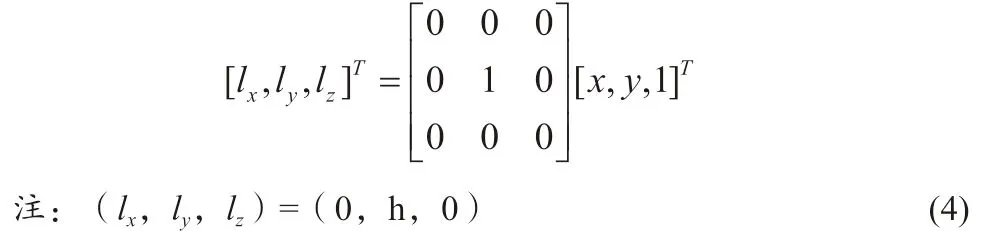
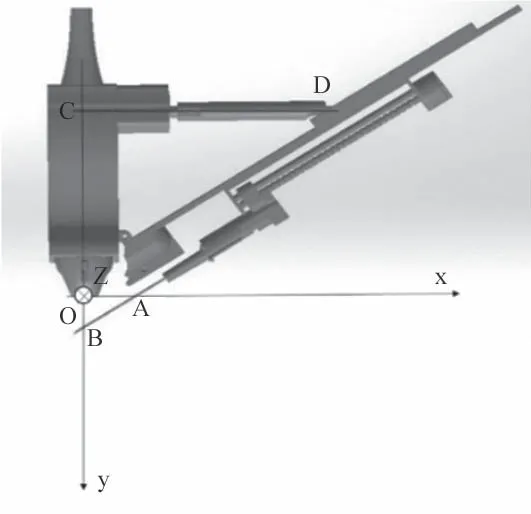
图5 以皮肤表面建立空间坐标系
在空间坐标系中,A 点为进针点,设其在空间坐标系中的坐标为(lOA,0,0),由空间坐标系中靶向血管的中心坐标和进针点的坐标,可以由勾股定理得到进针的长度,但是在实际操作的过程中,因为步进电机在进步的过程中往往丢步,不能够进针到指定的空间位置,因此设计容错系数β,得到最终进针长度的公式为:

经过多次试验计算,本研究中,当β=0.02 的时候进针效果最好,公式(5)中的R 为靶向血管的半径。
2.2.1 获取离散数据
由图5 中所示,直线AB 与x 轴正向夹角为进针的角度。根据机械结构设计的特点,调整角度的直线推杆电机的轴线在直线CD 上,因此实际工作过程中,穿刺机构是通过调整线段CD 的长度来改变进针角度的大小。若要实现智能穿刺,则必须建立可穿刺深度与线段CD 之间的函数关系,设通过几何分析,无法直接得到函数f(x)的具体表达式,因此首先获取离散数据,之后应用数据拟合的方式得到f(x)。
运用三维模型取得h 与lCD之间的关系的50 组离散数据进行曲线拟合,其中h 的取值范围是3.05~12.79 mm,即为本研究的智能穿刺设备可适用的血管深度范围。
2.2.2 插值方式的选择
本文中为了得到最合适的拟合曲线,应用四种常用的曲线拟合方式进行离散数据的处理,并结合实际情况,提出了一个评价系数用于测评不同拟合方式在本研究中的适用程度。本研究中对比四种插值的方式,分别是高斯插值、指数插值、傅里叶插值以及多项式插值。
对于差值精度,有多个可以参考的评估参数,比较常用的有:方差误差平方和(Sum of Squared Errors,SSE),该统计参数计算的是拟合数据和原始数据对应点的误差的平方和,计算公式如下:

SSE 越接近于0,说明模型选择和拟合地更好,数据预测也越成功;确定系数(R-Square),表达式为公式(7):

其中SSR(Sum of Squares of the Regression)即为预测数据与原始数据均值之差的平方和,公式(8):

SST(Total Sum of Squares),即为原始数据和均值之差的平方和,公式(9):

理论上对于数据拟合出的函数,精确度越高越好,但是高的精确性意味着较长的计算时间。由于本研究中的超声医疗设备不同于一般的通用型计算机,其资源有限,复杂的公式对于计算资源的消耗较大,并且本研究中的实验结果需要有实时性的要求。因此,对于本研究来说,数据拟合的精确度和计算时间同样重要。为了能够对于不同的拟合方式进行比较,引入了一个评估参数Evalute,这个参数的公式如下:

注:T函数执行一次的运算时间,单位是s。
对于各种插值方式来说,Evalute 越小则综合性能越好,将Evalute 作为选择插值方式的依据。表1 显示了各种插值函数对于原始数据插值的结果。
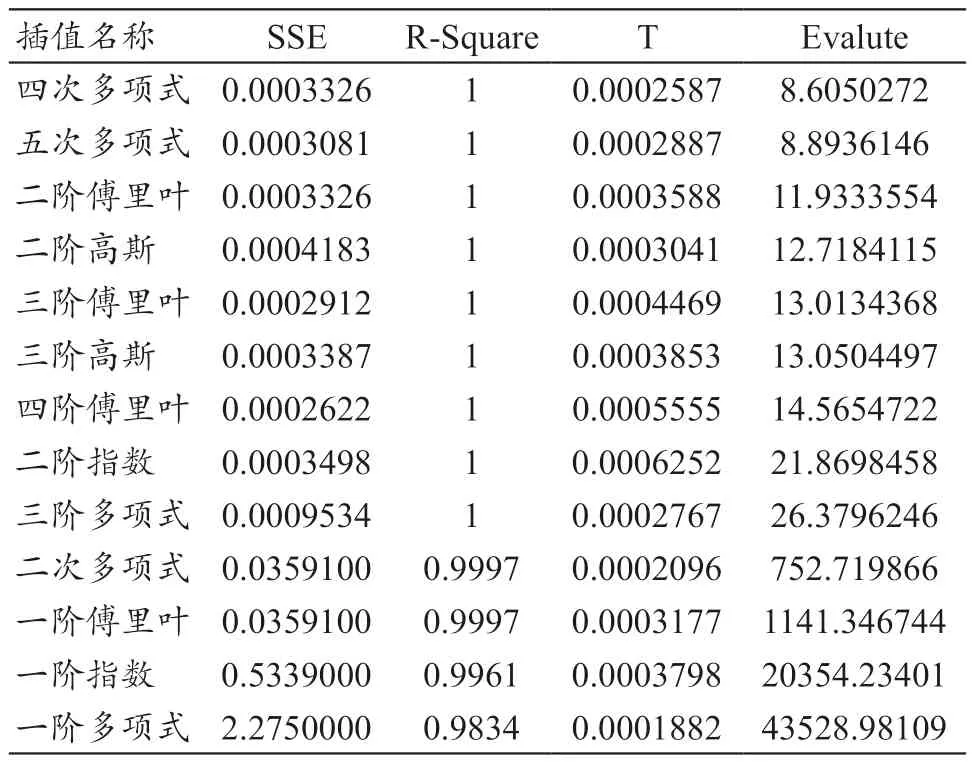
表1 各种插值函数评估结果
由表1 所示,可以很清晰地得出看出,四阶傅里叶插值虽然是插值效果最好的,但是公式运行速度比较慢,在最终的评估中得分在中游,而四次多项式插值的效果与四阶傅里叶插值的效果相差不大,同样排名靠前,但是运行速度相对较快,公式简单,因此在最后的测评,排名靠前。
2.2.3 拟合函数系数的计算
经过以上评估,最终本研究中,选择四次多项式插值作为最终的插值方式,得到最终的插值函数的形式为:

代入离散数据确定式中各个系数的值,计算公式为(12)所示。公式总共要确定5 个系数,每代入五组数据可以得到一组系数值,数据总量为50 组,通过代入求解的方式得到45 组系数值,最终选取各个系数的中位数组成最终的确定系数组。
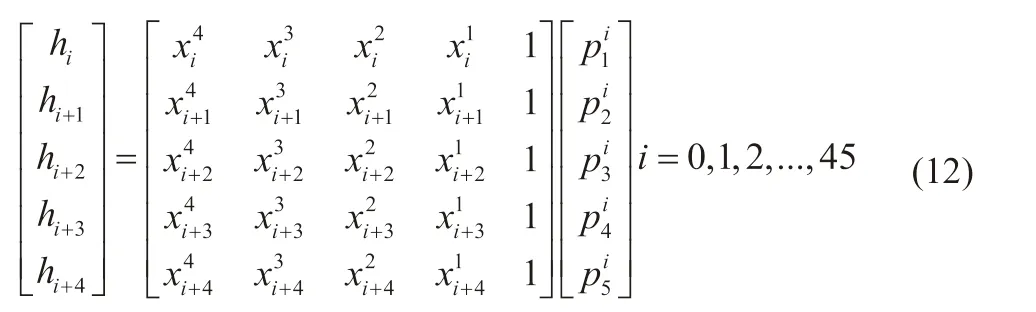
pj的值为的数列中的中位数,j=1,2,3,4,5,最终确定多项式的系数如表2 所示。
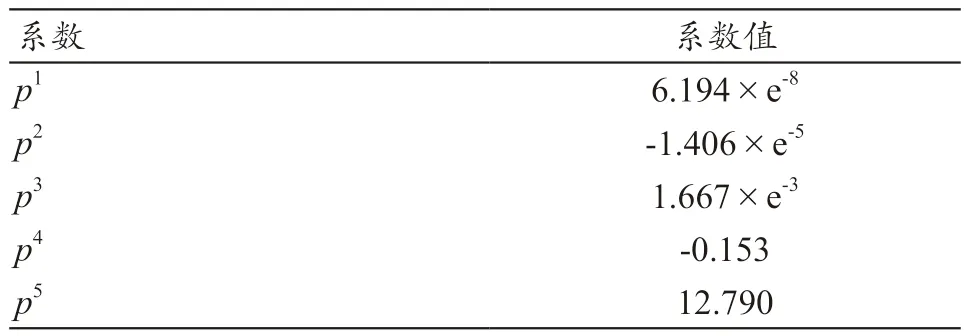
表2 四次多项式系数表
靶向血管的深度与进针角度之间存在函数关系,当取得了靶向血管在空间中的位置信息之后,即可得到靶向血管的深度。
经过多次试验及评估,综合参考曲线拟合精度和运算量的因素,最终选择四次多项式插值作为曲线拟合的方式。图6 曲线所示的即为曲线拟合结果与离散数据的吻合程度。
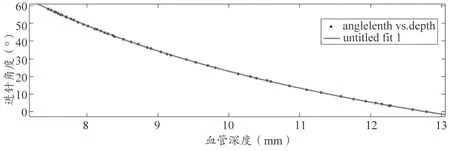
图6 四次多项式曲线拟合结果
3 图像目标检测算法
通过超声图像处理获得靶向血管的深度信息和血管半径信息如图7 所示,即为超声图像中的感兴趣区域。方框中的区域,即为最终检测处理的区域,方框内的点即为检测出的靶向血管的圆心点。

图7 超声图像中识别靶向血管
3.1 靶向血管检测的方法
本研究中,采用的基于评估后自适应选取阈值的方法来对超声图像进行分割。
采集对象为临床患者,患者家属以及医护人员均为自愿。采集个体上肢静脉超声图像,护士通过按压确定静脉血管并调整超声探头位于静脉的正上方,即调整静脉血管位于穿刺中分线上,保存图像后供后续图像分析使用。
基于HAAR 特征和Adaboost 分类器的检测算法是广泛使用的一种模式识别方法。根据每种靶向血管的超声图像对应的中心区域像素均值的不同,依次设定阈值将血管内部与外部分开。表3 即为不同情况的血管阈值选取表格。
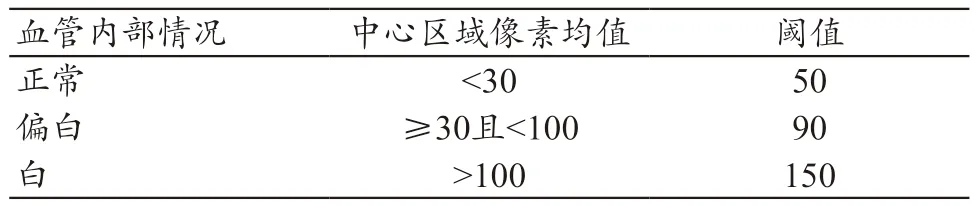
表3 不同情况的血管阈值选取表
3.2 计算半径和血管中心位置
计算半径的过程,即为计算中心区域像素点到边界像素点距离的过程,前文中已经可以通过阈值分割得到中心区域的像素点,通过边界检测的Canny 算法可以得到靶向血管的边界像素点。二者之差即为靶向血管半径的长度。
中心像素区域的中心点,作为血管的圆心,计算其在超声图像中的坐标值,血管的深度即为中心点的纵坐标的值。
4 实验数据分析
图8 所示即为本课题验证智能穿刺机构穿刺成功率的人体模型,该模型中有五条模拟人体贵要静脉血管,血管中心距离皮肤的深度分布在3.0~13.0 mm,血管的半径分布在1.3~3.78 mm,适合本文中所设计穿刺机构的可应用的条件。

图8 体模实物图
在人体模型上的实验对智能穿刺系统的功能性进行验证。在系统的可以操作范围内,即深度范围在3.05~12.79 mm 之间的血管,进行置管手术,成功率较高,达到98.78%,对于不同大小的血管的穿刺数据具体如表4中所示。实验表明,应用本文中的智能穿刺系统大大提高了PICC置管手术的一次穿刺成功率。由于血管条件的不同,对于较细的血管,存在穿刺失败的情况,这时候需要医护人员根据实际情况适当调整选择血管条件较好的位置进行穿刺。
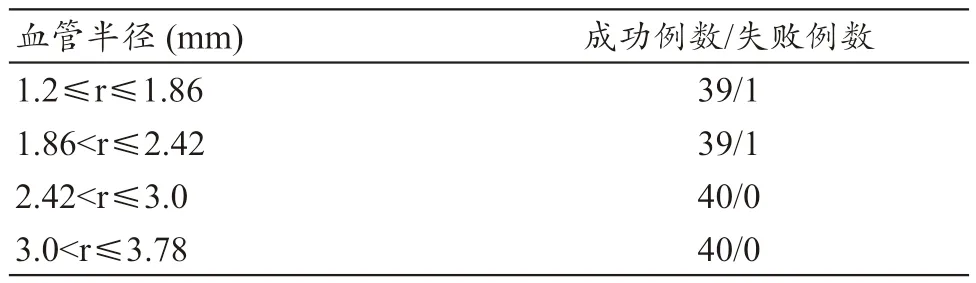
表4 穿刺置管情况统计(例)
5 总结
本文利用超声图像获取得到靶向血管的相关信息,设计了相应的机械结构,并根据机械结构提出了一种曲线拟合的评估方式。应用本文中的设计方案,可以大大提高静脉穿刺的成功率,即使是没有经过系统的医护技能培训的人,也能够完成静脉穿刺的操作,在未来的家庭医疗,战地营救等场合,能够发挥应有的作用。
