基于加速区域卷积神经网络的高铁接触网承力索底座裂纹检测研究
2019-08-20刘志刚陈隽文
刘 凯, 刘志刚, 陈隽文
(西南交通大学 电气工程学院, 四川 成都 610031)
承力索底座是接触网支撑结构的重要承力部件,用于平腕臂与承力索的固定连接。列车运行时的机械振动导致承力索底座频繁剧烈震动,工作环境恶劣,又由于列车运行沿线人烟稀少、维护难度大,承力索底座成为接触网支撑悬挂系统薄弱的环节之一。目前国内接触网非接触式图像检测技术的发展尚处于初级阶段,检测效率亟待提高[1]。
目前,接触网图像检测技术多集中于依据检测目标特点匹配零部件,例如文献[2]提出一种结合二代曲波变换与能量条带方法定位绝缘子,文献[3]提出一种基于快速鲁棒性特征匹配及Hough变换实现对旋转双耳的精确定位,文献[4]提出通过金字塔近邻平均算法分解多频率图像并提取峰值点达到快速模糊匹配棒式绝缘子的目的。这些通过提取特定局部特征实现目标匹配的方法具有直观快速的优点,但准确率不高。文献[5]提出计算接触网正负样本的方向梯度直方图(Histogram of Oriented Gradient, HOG)特征来训练支持向量机(Support Vector Machine,SVM),通过判断滑动窗口内是否含有旋转双耳进行定位,该方法将机器学习引入接触网零部件定位中,具有一定鲁棒性,识别效率较低。深度学习[6]作为机器学习的另一种实现方法,通过复杂非线性结构对数据进行高层抽象提取深层特征并通过迭代训练修正识别误差,在识别效率与鲁棒性上与其他机器学习方法相比有明显优势,但由于深度学习刚刚兴起,目前在接触网图像检测领域的应用仍然较少。
在故障识别算法方面,接触网零部件的故障检测多集中于断裂、破损等严重故障的检测,如文献[6]采用二维Gabor小波变换实现耳片断裂故障检测,文献[7]利用谱聚类判断瓷瓶绝缘子破损故障,文献[8]提出通过分析边界曲线上各点的弯曲度判断是否存在耳片断裂故障。由于承力索底座材质及拍摄条件的影响,定位的承力索底座图片信噪比较低,再加上其故障初期的裂纹细小且形状多样容易与边缘混淆。因此,传统图像处理方法难以提取和判别承力索底座的初期裂纹故障。
基于此,本文提出一种承力索底座的裂纹检测方法,该方法包含承力索底座定位与裂纹检测两个过程。为提高定位准确率,承力索底座定位过程使用深度学习框架下的加速区域卷积神经网络(Faster Region-based Convolutional Neural Networks,Faster R-CNN)[9]。裂痕检测过程主要包括采用Radon变换及投影法提取疑似裂纹区域,使用基于Beamlet变换[10-11]的局部链搜索算法来判断是否存在裂纹并提取裂纹图像。这种裂痕检测方法对局部的高维奇异性检测有效,能达到快速准确检测承力索底座裂纹的目的。
1 基于卷积神经网络的承力索底座定位
Faster R-CNN由快速区域卷积神经网络(Fast Region-based Convolutional Neural Networks,Fast R-CNN)[12]改进得到,保留了Fast R-CNN的感兴趣区域(Region of Interest, RoI)池化层及双输出端对端的基本结构;在目标候选区域的选择方法上,通过增加候选区域建议网络(Region Proposal Network,RPN)替换耗时较长的选择性搜索方法,使Faster R-CNN的准确率和识别速度有明显提升,该网络具有识别速度快、占有资源少、识别准确率高的优点。
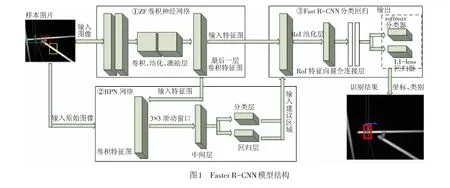
Faster R-CNN的网络结构见图1。首先输入单张3通道接触网全局灰度图像,通过预置的卷积网络得到接触网卷积特征图,然后RPN网络生成承力索底座候选区域,两者共同输入Fast R-CNN的RoI池化层生成特征向量,接着由损失函数回归计算得到该张图像的分类结果与目标坐标,最终得到承力索底座的矩形框坐标,实现对承力索底座的定位与提取。
1.1 Faster R-CNN卷积神经网络结构
(1) ZF卷积神经网络
为提取图像的深层特征向量,选用ZF(Zeiler & Fergus Net)卷积网络[13]作为Faster R-CNN的训练网络,通过使用ReLU激励函数、池化、全连接等方式提取图像特征,使用小卷积核以保留更多的原始像素信息,其结构见图2。
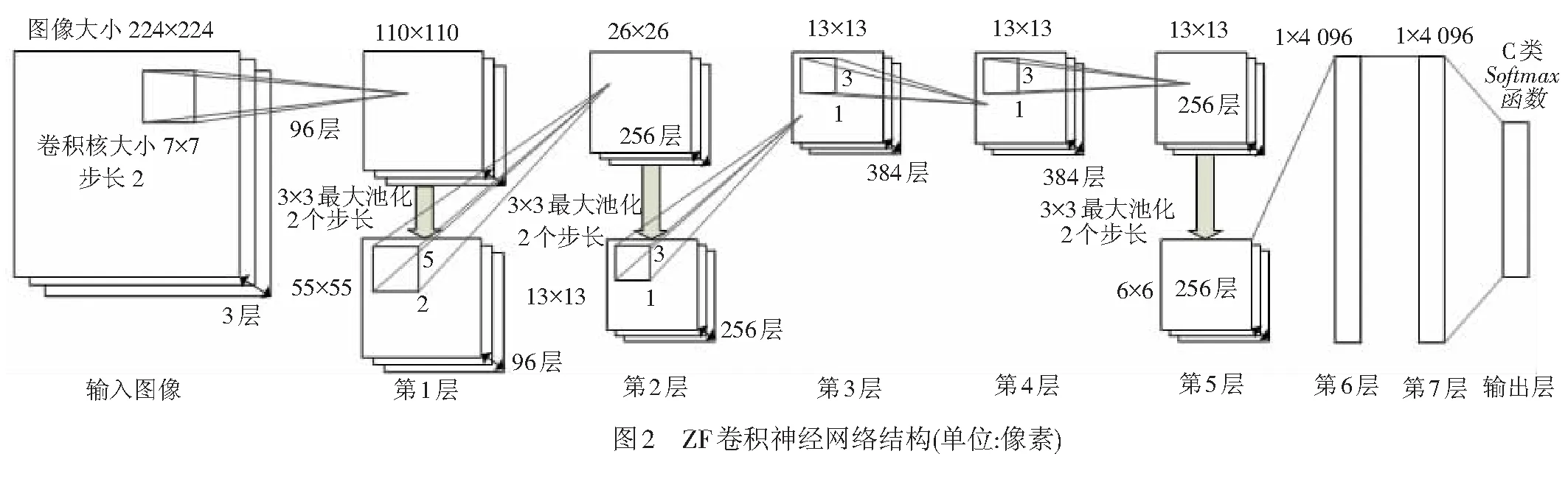
该神经网络结构共8层,输入层为原始图像经通道复制和裁剪产生的224×224像素的3通道灰度图像。其基本结构为
① 卷积层:各层为了感受野不同使卷积核的数量、大小、步长均不同。例如第1层包含96个卷积核,每个核的大小为7×7像素,x1和y1的步长跨度均为2。
② 激励层:通过矫正激励函数使网络具有一定非线性,激励函数为
ReLU(x1)=max(x1,0)
( 1 )
式中:ReLU为激励函数;x1为输入的卷积值。
③ 池化层:各池化层均对卷积得到的特征图进行最大池化操作以缩小图片尺寸、减小网络计算量,操作区域为3×3,步长跨度为2。
④ 全连接层:网络最后两层为全连接层并通过C类的Softmax函数生成结果得到特征向量,其中C为类别个数。
原始接触网图像经过ZF网络卷积等操作后最终输出256张包含接触网图像深层特征的卷积特征图。
(2) RPN网络
通过ZF卷积网络得到图像的深层特征向量,使用RPN网络在接触网图像上提取候选区域,RPN网络工作原理见图3,其中k为候选区域个数。
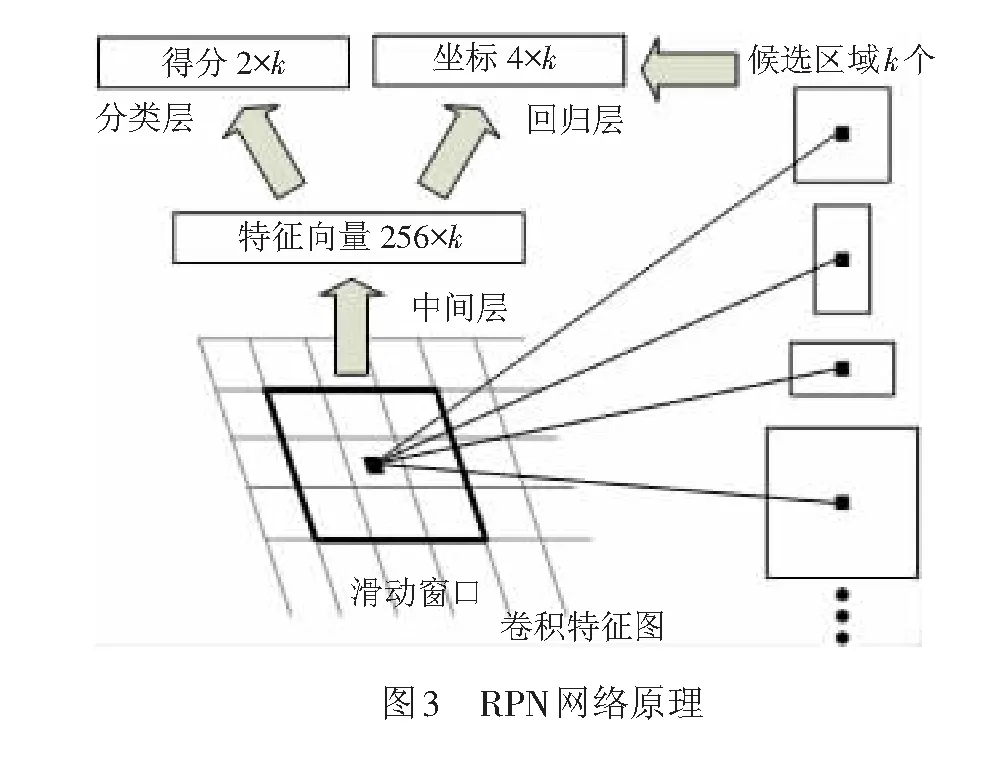
首先将ZF网络输出的256维卷积特征图输入RPN网络,对特征图上的滑动窗口使用k种不同大小与长宽比的区域采集接触网卷积特征图的特征,得到k个候选区域及其对应256维特征向量。将该滑动窗口的k个候选区域和特征向量分别输入分类层和回归层,由分类层输出候选区域内前景与背景(即是否包含目标)的得分。若卷积特征图的候选区域与图像中目标的真实区域的重叠率大于阈值(如0.7)时,前景标签为1,背景为0;若小于其另一阈值(如0.3)时,则背景标签为1,前景为0;其他不参与训练。对于标签为1的区域,通过回归层修正候选区域坐标并寻找对应输入图像的坐标与图像中真实的目标坐标之间的映射关系,输出得分较高的候选区域。
(3) Fast R-CNN类别分类及坐标回归
得到接触网图像候选区域及对应深层特征向量,即可通过全连接层对每个候选区域分类并精确提取目标矩形框坐标。将卷积神经网络得到的每个候选区域及其对应特征向量经过池化层归一化后输入全连接层,全连接层分别连接两个不同的输出层,两个输出层具有两个不同的优化目标[12],第一个输出层使用Softmax分类器通过概率大小对目标分类,若有k个识别的目标种类,加上一个背景种类,则该输出层将输出k+1个实数,代表该候选区域中包含的物体所属类别的概率值。第二个输出层通过L1-loss回归器进行边界框回归,该输出层将输出4(k+1)个实数,每4个实数代表对应种类的物体所在的矩形框的精确位置,回归器形式表示为
( 2 )

smoothL1函数综合了平方损失函数和绝对值损失函数特点,其计算式为
( 3 )
通过选取概率最大值及对应矩形框位置得到最有可能的类别(承力索底座或背景)与对应目标的位置,通过输入样本图片进行前向传播以及反向传播不断修正各模块各层卷积核等计算参数来达到代价函数最小的目的,实现对接触网样本图片的准确分类与定位。
2.2 基于Faster R-CNN的承力索底座定位识别
高速铁路现场拍摄的支撑悬挂装置图像作为Faster R-CNN样本库图片,其图片大小为2 448×2 048像素,将样本库共1 764张支撑悬挂装置图片随机划分为训练集、检验集、测试集。其中,训练集用来训练模型确定参数;检验集用来确定网络结构或控制模型复杂程度;测试集用来检验最终选择最优的模型的性能,部分样本图像见图4。
Faster R-CNN使用轮流训练方法,该训练过程为
Step1输入接触网训练集图像,缩小接触网图像尺寸至224×224像素,使用ImageNet预训练模型初始化各层参数,调整RPN网络参数用于候选区域提取。
Step2根据上步生成的候选区域,训练Fast R-CNN检测网络。
Step3使用第二步训练好的检测网络训练RPN网络但其中的共享卷积层固定不变。
Step4保持共享卷积层的固定,根据RPN网络重新生成候选区域,继续微调Fast R-CNN的其他层。
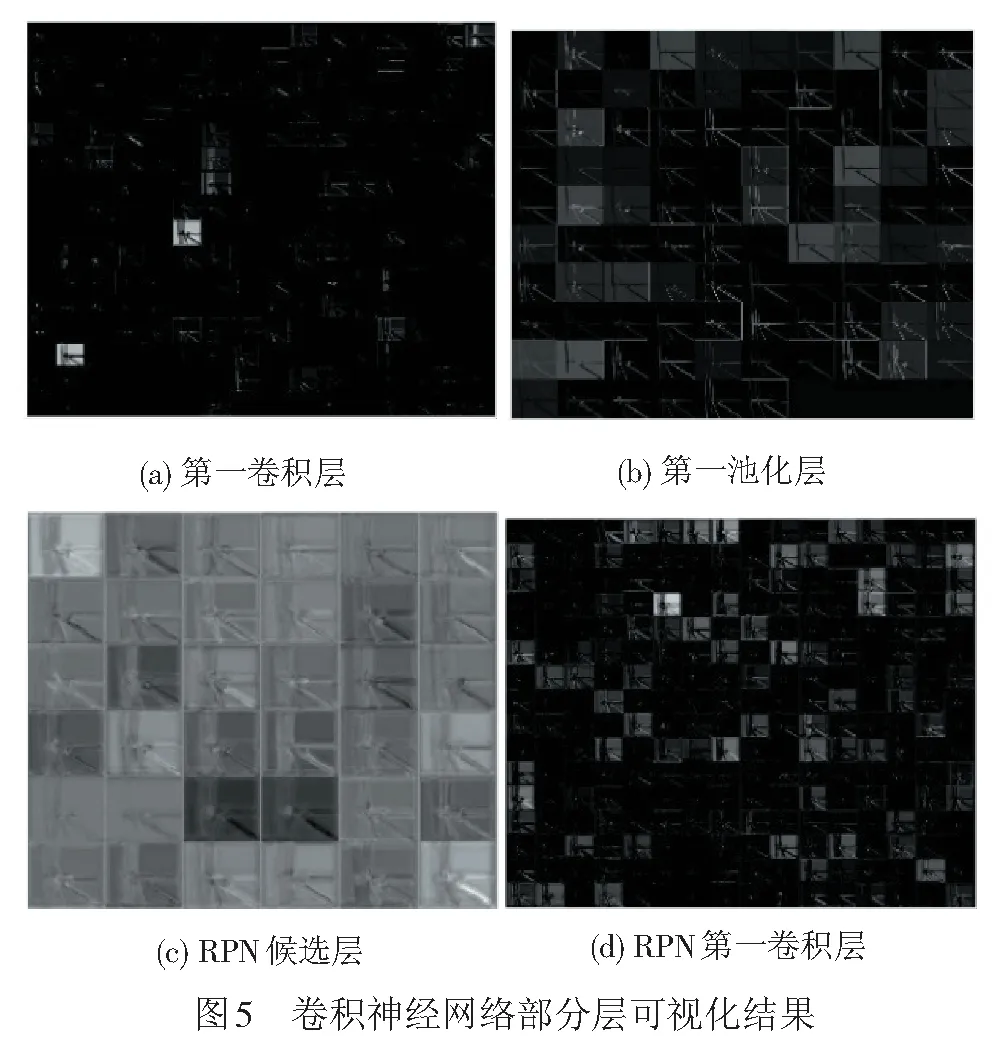
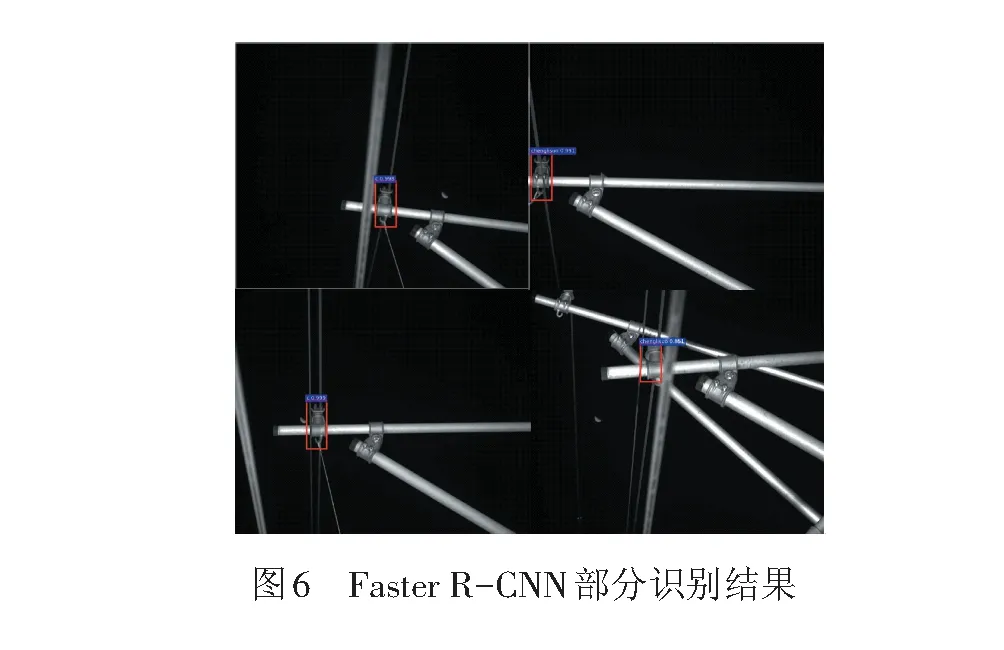
对于常规目标识别方法通常需要经过图像预处理、图像特征提取、特征选择、目标分类等多个步骤分别设计算法实现,而Faster R-CNN选取接触网训练集的数据作为卷积神经网络的输入,通过前向传播得到网络输出,利用输出值与标签值的最大熵准则,使用反向传播调整卷积神经网络各层权重,选取测试集检验识别准确率,部分层的可视化结果和部分识别结果分别见图5、图6。
2 承力索底座裂纹检测
由于承力索底座结构复杂、裂纹形状多变,一般图像算法较难实现直接裂纹检测。通过分析图像特点可知,承力索底座裂纹虽形状不定但疑似裂纹区域周围结构特征明显且故障位置单一,可以使用Radon变换及反变换、投影法等预处理操作提取出疑似裂纹区域,使用Beamlet变换对该区域进行多尺度分解与重构来判断是否存在裂纹。
2.1 承力索底座图像疑似裂纹提取
承力索底座定位结果提取的局部图像具有结构特征明显的特点,利用该特点提取承力索底座图像中的疑似裂纹区域。先对承力索底座图像进行基于形态学图像增强,采取固定阈值方式二值化图像后进行Canny边缘算子过滤,即可得到承力索底座的明显轮廓图像。然后对该轮廓边缘进行Radon变换及反变换,其连续二维平面函数f(x,y)的Radon变换为
R(ρ,θ)=

( 4 )
式中:D为整个图像平面;f(x,y)为图像上某点(x,y)的像素点灰度值;g为特征函数;ρ为(x,y)平面内直线到原点的距离;θ为原点到直线的垂线与x轴的夹角。
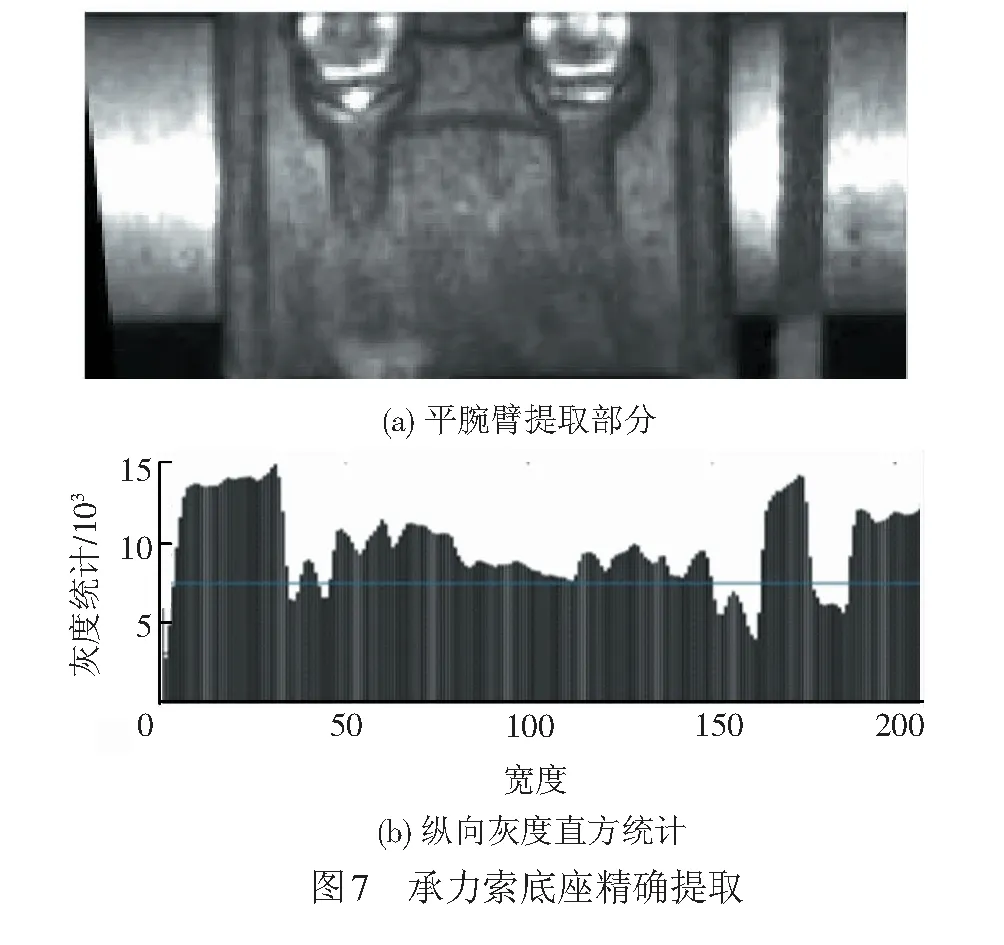
对Radon重构图像以-30°~30°的角度范围内搜索最长及次最长直线以得到平腕臂的上下边缘位置进而得到平腕臂提取部分图,接着按倾斜角度矫正图像并使用投影法[14],得到纵向灰度统计直方图,通过设定阈值精确提取出承力索底座图像,见图7。
通过对承力索底座工作状态及受力分析[12]可知,承力索底座的裂纹故障一般出现在圆筒形承力索座本体上,可以采用固定图像高度比例的方式提取疑似裂纹区域,提取效果见图8,提取范围为
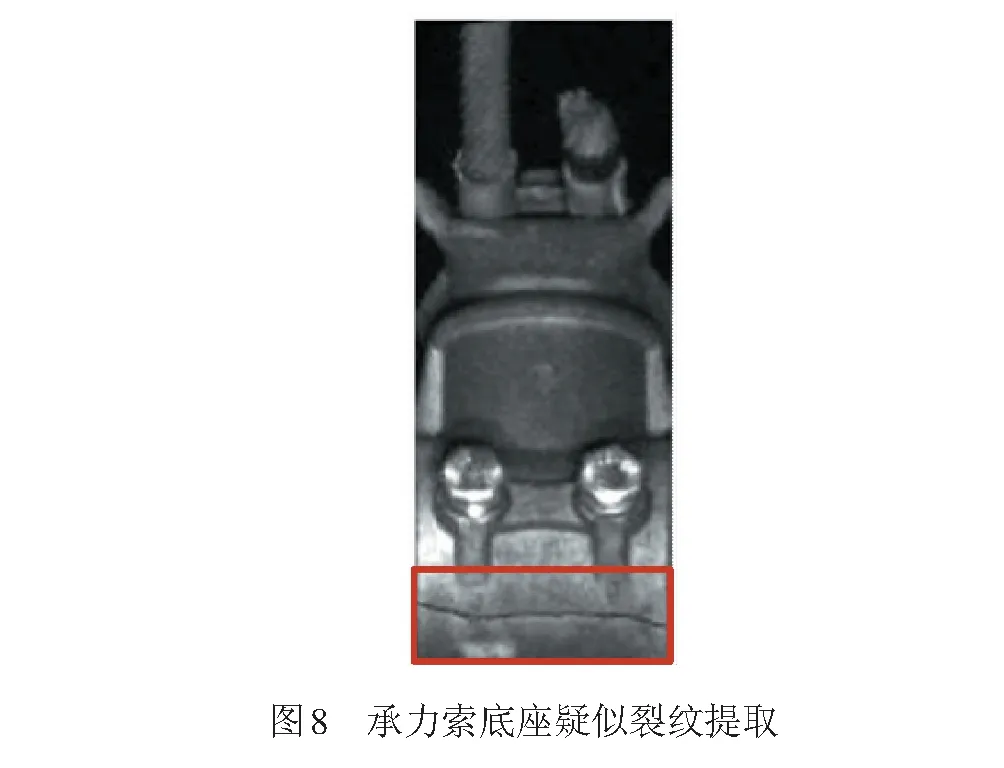
fres=
( 5 )
式中:fres为疑似裂纹提取结果图像;wf为图像宽度;hf为图像高度;p为承力索底座正反状态,1为正面,0为反面。
2.2 基于Beamlet变换的局部链搜索算法
由于承力索底座表面有纹理等非裂纹的冗余信息,容易造成误检测或漏检。而Beamlet算法能在多尺度下刻画方向与相位进而分析连通性,在承力索底座表面图像这种低信噪比图像上能够突出有效信息明显抑制噪声[15],于是对基于Beamlet变换对定位提取的承力索底座图像的裂纹检测进行了初步研究。
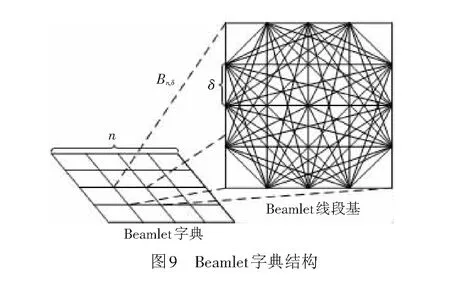
首先根据图像参数生成Beamlet字典Bn,δ来提供对所有线段集合的多尺度逼近的线段基库,这些线段基库通过对边长为n的正方形图像递归二进划分(尺度即为递归次数)、以长度δ标记顶点和连接顶点得到,尺度为3的Beamlet字典见图9。
生成Beamlet字典Bn,δ后即可对图像进行Beamelt变换,Beamlet连续变换定义为
( 6 )
式中:l为Beamlet字典中的线段;x3为像素位置;Tf为Beamlet变换系数。
而对于一条某一尺度下的Beamlet线段基b,其Beamlet离散变换系数为
( 7 )
b∈Bn,δ
式中:Mb为Beamlet线段基b在正方形图像上的矩阵;x4、y4分别为正方形图像上的横、纵坐标。
对变形为正方形的疑似裂纹区域按照式( 7 )进行尺度为4的Beamlet变换并筛选,变换结果见图10,其中每个方格中的白色线段即为每个二进划分得到的正方形方格内变换系数Tf最大值对应的直线。
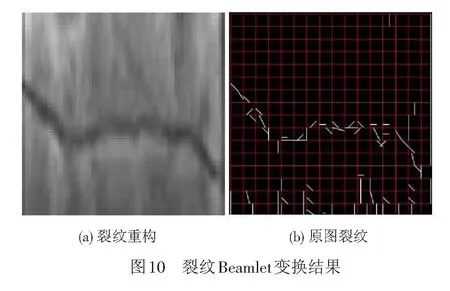
通过图10(a)和图10(b)的对比可知,对承力索底座裂纹区域直接Beamlet变换仍会出现部分非裂纹信息,影响状态判断。根据承力索底座裂纹通常为较长链形裂纹[16]及Beamlet变换系数表征直线信息的特点,提出对Beamlet变换得到的重构图像使用基于邻接表的局部链搜索算法提取承力索底座裂纹,算法流程为
Step1根据承力索底座Beamlet重构数据,筛选Beamlet系数T大于选定阈值t1的位置ai作为局部链搜索的种子A。
Step2取种子的第一个数据A(0)作为局部链起点L(0)及邻接表起点P(0)。
Step3搜索P(0)周围八邻域B的Beamlet系数T(B)。若其中一个邻域bi∈B的Beamlet系数T(bi)>t2,且满足该邻域bi与P(0)的Beamlet系数差的绝对值小于阈值t3。同时bi从未被搜索过,则将bi加入邻接表P及局部链L末尾。
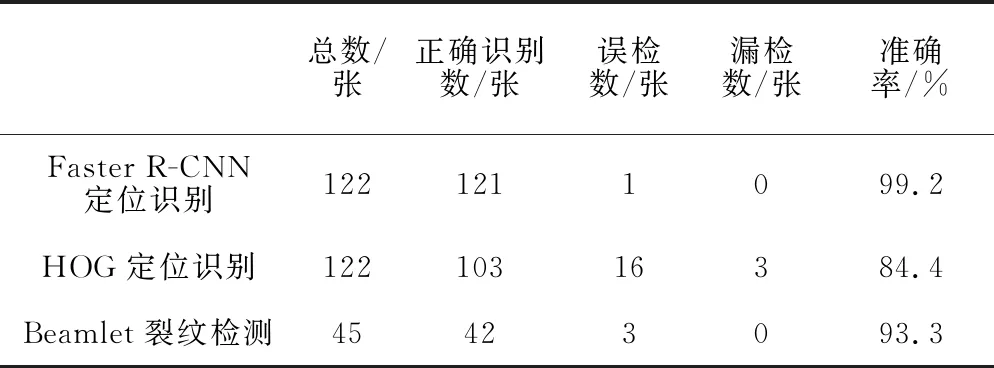
|T(bi)-T[P(0)]| ( 8 ) Step4删除邻接表P中的第一个数据P(0),重复Step3直至邻接表P为空。 Step5删除种子A中已搜索过的所有位置bi,重复Step2得到所有局部链Li,直至种子A为空。比较搜索出的每个局部链Li的长度Lnumi与纵横比ri是否满足要求,见式( 9 )、式(10),输出满足要求的局部链并视其为裂纹;否则输出状态正常。 Lnumi>wf/2 ( 9 ) (10) 式中:Lnumi为局部链Li中的数据个数;xmax、xmin、ymax、ymin分别为局部链Li中数据的横纵坐标最值。 对提取的疑似裂纹区域进行基于Beamlet变换的局部链搜索算法的裂痕检测效果见图11,可以看出经过局部链搜索的Beamlet变换结果能够较好地反映出承力索表面故障初期窄细裂纹,并且对有表面纹理等低信噪比承力索底座图像效果明显。 为验证本文方法在承力索底座定位和裂纹检测中的有效性,对122张来自现场的接触网支撑与悬挂装置图像进行实验检测。其中承力索底座断裂故障的图像15张,定位及裂纹检测结果见表1。在定位识别中,基于卷积神经网络的承力索底座定位算法平均识别准确率为99.2%,平均每张图片耗时0.12 s。为进一步比较性能,将文献[6]提出的定位识别方法应用于承力索底座中,根据结果可知由于SVM仅为二分类且鲁棒性不高,检测准确率仅为84.4%,且使用滑动窗口的HOG特征提取次数过多,导致单张图片耗时4.39 s。因此所使用的卷积神经网络与其相比在识别定位效率和准确率上均有很大提高。 在裂纹检测中,Beamlet变换能够通过多尺度刻画直线连通性及相位,具有较强鲁棒性。其中少部分正常样本被误识别是由于下方接触线对承力索座造成遮挡,将接触线误检为裂纹。 表1 承力索底座故障实验检测数据 (1) 详细介绍了基于ZF卷积神经网络的深度学习模型Faster R-CNN的基本结构及原理功能,提出了应用该模型定位接触网承力索底座的方法。 (2) 介绍了根据承力索底座结构特点的疑似裂纹提取方法,提出了基于Beamlet变换的局部链搜索算法实现承力索底座窄细裂纹的检测。 (3) 使用了接触网数据集对所提出方法的性能进行对比验证。实验表明,该方法具有较高的检测准确率,对拍摄环境、拍摄距离、拍摄角度以及曝光强度等具有较好鲁棒性,且兼顾了故障发生初期裂痕较窄较细的情况,具有一定参考价值。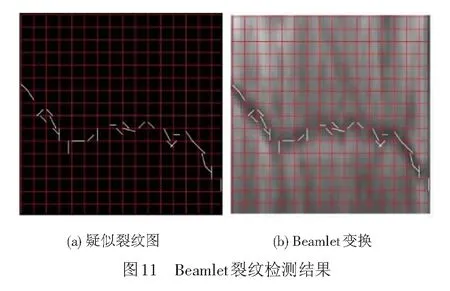
3 检测结果
4 结论
