基于改进灰狼算法的多传感器探测联盟*
2019-08-15谢家豪韦道知
谢家豪, 韦道知
(1.空军工程大学 研究生院,陕西 西安 710051;2.空军工程大学 防空反导学院,陕西 西安 710051)
0 引 言
现代战争是在陆、海、空、天、电磁五维结构中进行的,仅靠单传感器搜集信息远远无法满足作战系统的作战需求,必须依靠空基、海基、陆基、天基等多平台多种传感器同时提供观测数据,通常通过对多传感器组建探测联盟的方式来实现对目标的连续高概率探测。
多传感器探测联盟的组建属于多传感器管理中的多目标分配问题,文献[1]比较系统地提出了多传感器交叉提示技术的概念,并将该技术应用在目标探测中,提高了探测的可靠性和时效性;文献[2]提出了离散粒子群算法在多传感器多目标分配中的应用,该算法具有很好的稳定性;文献[3]提出了基于有色Petri网络的算法,证明了算法的优越性;文献[4]考虑通信中的异步性,提出针对分布式任务的协商(distributed task consultation,DTC)算法,解决了考虑传感器异步通信情况下的传感器资源管理问题;文献[5]主要采用合同网和改进合同网算法实现多传感器多目标分配,该算法虽然收敛速度较快,但其求解能力有待进一步增强;文献[6]提出一种能量有效的分布式传感器管理算法,具有收敛性好的特点;文献[7]基于人工蜂群算法理论,提出了寻优能力更强的改进人工蜂群算法,并有效验证了算法的收敛性和鲁棒性;文献[8]在传感器配置优化中提出了改进混合蛙跳算法,算法的收敛程度大幅提高;文献[9]提出了一种遗传算法模型,较好地验证了算法的稳定性。
从上述文献中可以得到,在目前多传感器探测联盟组建的算法中,虽然算法的收敛性和稳定性较好,但是算法的求解质量有待进一步加强并且算法的寻优能力较弱,实时性和有效性差等缺点。针对以上问题,提出基于改进灰狼算法的多传感器探测联盟方案。
1 模型的建立
1.1 多传感器探测联盟模型的建立
假设多传感器探测联盟中含有个m传感器,在某一时刻共有n个目标。其中,在k时刻,对目标t组建的传感器探测联盟记为St={s1,s2,…,sm}。
设探测联盟C为一个m×n阶的0-1矩阵,则可得
传感器对目标的探测精度A为一个m×n阶矩阵,其中,aij为传感器si对目标tj的探测精度。
传感器si对目标t探测精度aij由式(1)计算得出
aij=nijtij/NT
(1)
式中nij为某时刻si对目标t探测到的目标数,tij为某时刻si探测到目标t的有效时间,N为联盟所需探测目标t的总数,T为目标t运动的总时间。
1.2 联盟能耗计算模型
当使用传感器si对目标探测时,能耗为
式中α1和β1为常数,取α1=0.01,β1=0.1,l(si)为si可同时探测的目标数目,r(si)为si的最远探测距离。
1.3 目标函数
建立多传感器探测联盟模型的目标函数时,应该使其满足多传感器探测联盟C的总探测精度A最大同时联盟的总能耗COST最小。因此可得如下目标函数

文中研究的情况是指传感器可对多个目标同时进行探测,但在实际情况下,传感器si同时探测到的目标数目ni应小于传感器同时探测到的最大目标数Ni。此外,建立的多传感器探测联盟中传感器个数nj应大于等于0。因此有约束条件:ni≤Ni,nj≥0。其中,ni为传感器si实际探测到的目标数目,nj为建立的探测联盟中的传感器个数。
1.5 评价函数
多传感器探测联盟的评价指标指多传感器探测联盟的最优解的值即适应度值,适应度值应与目标总探测精度A成正比,与最大总耗能COST成反比,故用Φ(X)来表示探测联盟的最优解的值
式中λj为传感器对目标t的最小探测精度,ηj为目标t的最大能耗值。
2 多传感器探测联盟的组建方法
基本灰狼优化(grey wolf optimization,GWO)算法一般将灰狼种群分为α,β,δ,ω狼这4个等级,主要通过模拟自然界灰狼的种群活动完成从对目标的发现到捕获目标的过程[10,11]。
基本灰狼算法的实现过程主要是靠改变a值来实现参数A的变化,当a值从2到0递减的过程中,相应的A值也在[-2a,2a]中取得任意值,当|A|≤1时,狼群围攻猎物,相反的,当|A|≥1时,狼群散开继续寻找最优解,而此时就会陷入离开最优解而去寻找局部最优解的情况[12,13],同时α,β,δ狼的位置在灰狼种群中又起着重要的作用,从而可能导致狼群存在一哄而上又一哄而散的情况。
针对上面提出的基本灰狼算法容易使得寻优过程陷入局部最优解的情况,现提出一种新的改进灰狼算法,即在灰狼种群中,每一头狼都可以按之前的方法听从狼α的指挥去寻找最优解,但同时每一头狼可以根据外界环境的变化具有自主决策的能力,通过对层次高于自己的狼的位置进行分析,实时决策,改变自己的位置来实现对最优解的寻找过程。
根据基本狼群算法对狼群的分类,将狼群分为4个层次,假设决策因子为D,狼群层级总数记为R,第i头狼在t时刻所处的层级即为Li,现给出每个层次狼的决策模型
Di=(R-Li)/(R-1)
(5)
由上式可知,R=4,当Li=1时,Di=1,即对于α狼来说决策因子为1,代表着α狼不具备自主决策权,处于种群首领的地位不发生改变,依旧具有总指挥权利;当Li=2时,Di=0.67,即对于β狼来说决策因子为0.67;当Li=3时,Di=0.33,即对于δ狼来说决策因子为0.33;当Li=4时,Di=0,即对于ω狼来说决策因子为0,即代表着ω狼不具有决策权,只能听从α,β,δ狼的指挥来对猎物进行围攻。
下面给出四种狼的位置更新公式。
1)α狼位置更新公式

2)β狼位置更新公式
式中Di为决策因子。
3)δ狼位置更新公式
(4) 改进后的中低速磁浮列车转向架振动的加速度功率谱密度表明,转向架结构固有频率避开了轨道不平顺谱频段,改善了转向架运行状态,其加速度功率谱密度符合轨道交通相关振动标准的要求。
4)ω狼位置更新公式
为保证种群的进化方向,每一次都要将本代的适应度值并和上一代的适应度值进行比较,如果优于上一代的适应度值,则更新位置,否则保持上一代个体的位置,可用如下
3 仿真与结果分析
假设某一传感器网络中共有10个传感器,同时针对敌方的8个来袭目标进行探测,下面给出每个传感器对目标的探测能力,如表1所示。

表1 传感器对目标探测精度表
3.1 灰狼算法改进前后探测联盟方案最优解比较
分别采用灰狼算法和改进灰狼算法对多传感器探测联盟的最优解进行计算,进行100次蒙特卡洛实验,得到的结果如图1所示,联盟方案如表2所示。

图1 灰狼算法改进前后对比

目标基本灰狼算法传感器探测精度能耗值改进灰狼算法传感器探测精度能耗值11,2,4,5,60.98560.151,50.85840.0522,40.89350.073,60.92010.0531,30.86300.053,60.88640.05430.65570.0430.65570.0453,50.91150.0420.75770.0262,3,50.74310.0250.80030.0472,50.63240.0330.65570.0382,4,60.78530.024,60.75620.03
由图1可知,改进灰狼算法和灰狼算法都能有效地解出多传感器探测联盟最优解。改进灰狼算法在迭代36次左右达到稳定,联盟最优解即适应度值为8.631,灰狼算法在迭代57次后达到稳定,联盟最优适应度值为6.756,通过仿真实验表明,改进灰狼算法在算法的收敛性方面较改进前的灰狼算法有所提高并且探测联盟的最优解即联盟适应度值更高,从而说明改进后的灰狼算法寻优能力有所提高。
3.2 灰狼种群容量对探测联盟方案最优解的影响
研究改进灰狼算法中的灰狼种群容量对多传感器探测联盟方案最优解的影响,进行100次蒙特卡洛实验,结果如图2所示,得到的最优联盟方案如表3所示。

图2 种群容量对联盟方案最优解的影响
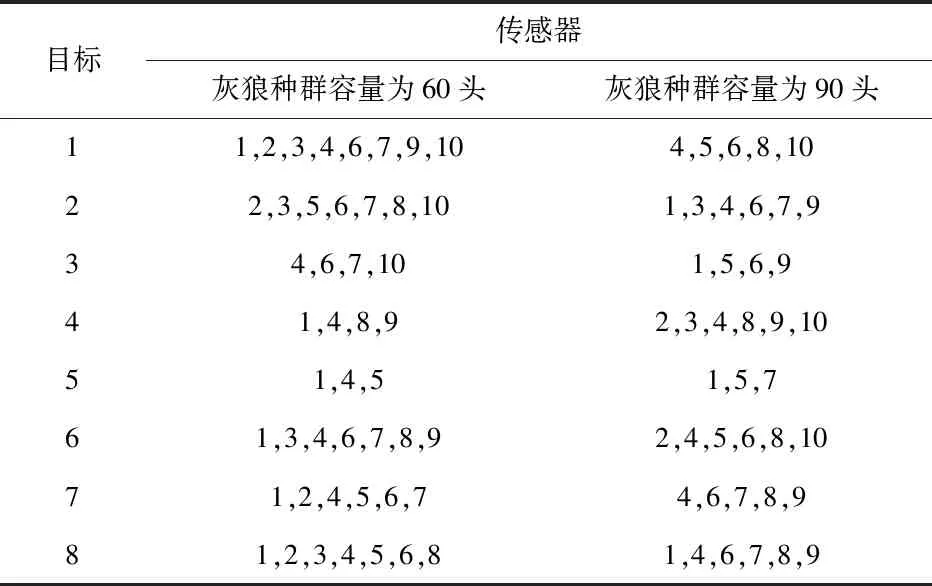
目标传感器灰狼种群容量为60头灰狼种群容量为90头11,2,3,4,6,7,9,104,5,6,8,1022,3,5,6,7,8,101,3,4,6,7,934,6,7,101,5,6,941,4,8,92,3,4,8,9,1051,4,51,5,761,3,4,6,7,8,92,4,5,6,8,1071,2,4,5,6,74,6,7,8,981,2,3,4,5,6,81,4,6,7,8,9
由图3可知,灰狼种群容量为60头时,算法在迭代68次后达到稳定,得最优探测联盟的适应度值为7.221,灰狼种群容量为90头时,结果在46次达到稳定,最优探测联盟的适应度值为8.358。由此可见,适当灰狼种群容量,能够加快算法收敛,能够更快的得到适应度值更高的探测联盟最优解。
3.3 不同算法对探测联盟方案最优解的影响
将本文提出的改进狼群算法同人工蜂群算法、粒子群算法进行对比,进行50次蒙特卡洛实验来研究不同算法对探测联盟方案最最优解的影响,实验结果如图3所示。

图3 实验结果
通过图3的仿真结果可知,3种算法的收敛性都很好,本文算法在迭代13次后达到联盟最优解,适应度值为9.633,算法运行时间最短;改进蜂群算法在迭代18次达到联盟最优解,适应度值为7.515;而粒子群算法运行时间最长,在迭代21次后达到最优解,但是此时的联盟适应度最低,由此可见本文算法运行时间短,收敛速度快并且稳定后能够使探测联盟保持较好的适应度值。
4 结 论
本文提出了基于改进灰狼算法的多传感器探测联盟方案。首先建立了目标观测模型,其次建立了多传感器目标探测模型并提出了联盟的目标函数及评价函数,通过对基本灰狼算法的改进与优化,使灰狼具有自主决策的权利来跳出局部最优解,增强算法对联盟最优解的寻优程度。改进灰狼算法具有算法设计思路简单,可实施性高,求解质量高并且算法收敛性好等特点。
