面向弹道优化的高超声速再入飞行器模态稳定性分析
2019-08-15雍恩米刘深深程艳青钱炜祺
雍恩米,刘深深,程艳青,钱炜祺,2
1. 中国空气动力研究与发展中心 空气动力学国家重点实验室,绵阳 621000 2. 中国空气动力研究与发展中心 计算空气动力研究所,绵阳 621000
升力式再入飞行器以高超声速再入地球大气层时,面临着复杂的临近空间力热环境,各类大气环境参数以及气动参数的不确定性对其再入运动具有较大影响,较小的扰动可使其偏离预定轨迹较大甚至逸出大气层,导致航天任务的失败。飞行器自由扰动运动的稳定性分析,可为飞行器总体设计、控制律研究等方面提供重要参考。已开展的稳定性研究工作主要集中在航空器的动力学稳定性分析以及航天器中弹道式再入飞行器如导弹、返回飞船的姿态稳定性分析[1-3],而对于升力式高超声速再入飞行器在临近空间的动力学系统稳定性的研究相当有限。
从公开发表的文献看,关于升力体飞行器的高超声速动力学稳定性研究最早出现在20世纪中叶。Etkin研究了再入航天器的动力学稳定性问题,将经典的飞行器纵向动力学理论扩展到高速轨道飞行,研究了有动力升力体飞行器在大气层边缘的圆轨道上的摄动运动,该项研究中保留了运动方程中的行星曲率、引力梯度和以高度为自变量的大气密度项,这些项在低速低高度飞行器的动力学稳定性研究中通常被忽略[4]。Vinh和Laitone研究了航天飞机滑翔再入的纵向动力学稳定性问题,引入无量纲时间变量,推导出了迎角的二阶线性微分方程,针对两种特殊情况,一是弹道式再入,二是小弹道倾角滑翔再入,求得了近似解,分析得出俯仰力矩导数是影响稳定性的主要因素[5]。文献[6]研究了带动力的吸气式高超声速飞行器长周期动力学稳定性,发现推力-马赫数曲线的斜率对长周期模态的影响较大,另外还提出了基本反馈控制策略,即采用速度和高度反馈回路来改善不稳定特性。Stich等研究了高超声速巡航飞行器的长周期特性和相关的飞行品质问题,在NASA的飞行仿真器上分析了马赫数10条件下的长周期模态的不稳定特性和发动机时间延迟对操纵品质的影响。针对不稳定的长周期动力学特性,推导了新的操纵品质判断准则[7-9]。Robert研究了超声速巡航纵向动力学稳定性,分析得出推力和气动外形对超声速巡航飞行稳定性影响较大,采用高度和速度反馈有利于巡航高度保持[10]。Lael和Darryll针对上升、稳定巡航和周期性巡航3种任务,研究了乘波体高超声速巡航飞行器纵向稳定性[11]。
国内关于升力式高超声速飞行器模态稳定性分析的研究较少。贾子安等研究了乘波体飞行器纵向静稳定特性,给出了有利于纵向静稳定的乘波体形状特征[12]。陈琛等针对升力体构型的高超声速飞行器稳定性问题,在高超声速飞行器的建模、静稳定性分析、自由扰动模态稳定性3个方面进行较深入的研究,其中模态稳定性分析针对特征点,且纵向运动主要关注短周期模态特性[13]。李锐研究了高超声速飞行器轨迹优化方法以及横航向稳定性判据,分析了给定外形高超声速飞行器在整个速度范围内的横航向稳定性[14]。苏二龙和罗建军研究了滑翔式高超声速飞行器大迎角横侧向失稳问题,采用延拓算法和分岔理论求解,对平衡分支的稳定性和突变点进行了分析[15]。高清和李潜对美国典型高超声速飞行器横侧向稳定性进行了分析[16]。叶友达等研究了类HTV-2高超声速飞行器滚转运动的稳定性以及滚转运动的失稳判据[17]。
本文研究了面向弹道优化问题的高超声速飞行器纵向模态稳定性,即针对无动力再入的高超声速飞行器,考虑大气密度随高度的变化和引力梯度,分析高超声速飞行器自由扰动运动的纵向稳定性,即纵向模态稳定性,并基于不同最优弹道的稳定性分析结果,提出对高超声速飞行器弹道优化设计的建议。
1 高超声速飞行器再入纵向运动模型
针对再入高超声速飞行器运动特性和弹道稳定性分析的需求,考虑地球为非旋转圆球时,飞行器无动力再入纵向动力学方程为[5]
(1)
(2)
(3)
(4)
(5)
θ=γ+α
(6)
式中:V、γ、q、r、θ、α分别为飞行器速度、航迹角、俯仰角速率、地心距、俯仰角和迎角;m为飞行器质量;Ix、Iy、Iz为主惯量矩;S为气动参考面积;l为参考长度。主要运动参数如图1所示,其中L、D、W分别为飞行器所受升力、阻力和重力,x轴为飞行器体轴纵向对称轴。大气密度ρ、引力加速度g是随高度变化的函数。气动力系数包括升力系数CL、阻力系数CD和俯仰力矩系数Cm。上述气动系数是高度h、马赫数Ma和迎角α的函数,即
(7)
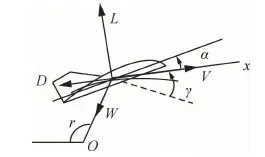
图1 纵向运动主要参数示意图Fig.1 Sketch map of main parameters of longitudinal motion
2 纵向动力学方程小扰动线性化
为分析高超声速飞行器的模态稳定性,即自由扰动运动的稳定性,引入基准运动和小扰动运动的概念,建立小扰动运动方程,使运动方程线性化,然后获得状态方程和转移矩阵,在此基础上进行沿弹道的纵向模态分析。
首先根据式(2)、式(5)、式(6)得到关于迎角的微分方程,即
(8)
对式(1)~式(4)和式(8)进行小扰动线性化,得到
(9)
(10)
(11)
(12)
(13)

纵向运动方程小扰动线性化过程中采用的大气密度模型为指数模型,即
ρ=ρ0e[-β(r-R0)]
(14)
式中:β为指数大气密度常数;R0为地球平均半径。因而有大气密度对地心距的导数为
(15)
引力模型采用平方反比模型,即
(16)
从而得到引力对地心距的导数为
(17)
(18)


(19)
那么纵向扰动运动的稳定性可以由求解特征方程D(s)=|sI-A|的特征根进行分析。
3 高超声速飞行器气动特性分析
为开展高超声速飞行器模态稳定性分析,还需要获得飞行器气动力数据。本文以美国高超声速飞行器HX(Hypersonic X-plane)为背景,进行类HX气动布局设计,利用二次曲线及基于类型函数和形状函数的CST(Class function and Shape function Transformation technique)方法[18-19],提出类HX升力体飞行器气动外形布局,其计算网格如图2所示。最后采用工程估算方法获得飞行器的气动力特性数据。
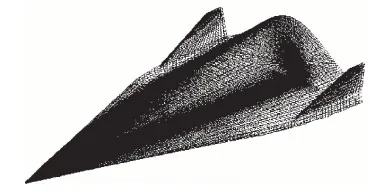
图2 飞行器计算网格Fig.2 Computational grid for vehicle
由于高超声速飞行器飞行空域范围较大,因此对于不同流区,采用了不同气动力工程计算方法。其中连续流区采用了修正牛顿理论。背风面修正利用Prandtl-Meyer公式,该类方法已经在高超声速飞行器计算中得到了广泛应用[20-21],其精度基本满足弹道设计与稳定性分析的精度要求。自由分子流区的气动特性则采用碰撞模型进行计算,而稀薄流区气动特性则采用当地化方法,连续流和自由分子流气动力系数通过桥函数得到。
基于上述方法,得到了高超声速飞行器在不同高度、马赫数、迎角和侧滑角下的气动特性。本文研究高超声速飞行器的弹道稳定性,因此主要考虑纵向气动力特性,图3给出了典型状态下的升力系数、阻力系数和俯仰力矩系数随迎角和舵偏角的变化曲面。
基于工程估算方法获得飞行器的气动力特性数据,进行纵向气动数据配平,可以进一步分析该高超声速飞行器的升阻特性。图4为给定迎角为10°,不同高度条件下升阻比随马赫数的变化曲线。图5为给定马赫数条件下,不同高度升阻比随迎角的变化曲线。分析图4、图5的结果可知:① 该飞行器在典型状态下,最大升阻比在2.4~2.5左右,属于高升阻比高超声速飞行器;② 该飞行器的最大升阻比迎角约为10°,在第4节模态分析设计典型弹道的标准迎角剖面时,可以此为依据,即给定标准迎角剖面应尽量发挥升阻比的优势;③ 在 给定高度条件下,该布局的高超声速飞行器升阻特性随迎角变化较大,而随马赫数变化较小,特别是飞行速度在马赫数10~20这个范围内。在设计高超声速飞行器再入典型弹道时,可以利用该特性,对所采用的气动力模型进行简化和建模,即主要考虑迎角变量对升阻特性的影响。
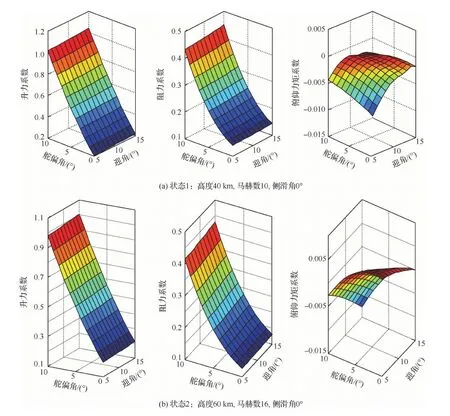
图3 典型状态纵向气动力特性Fig.3 Longitude aerodynamic characteristic on typical states
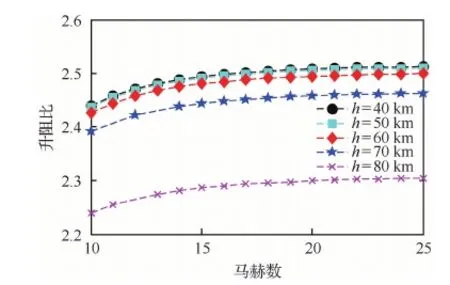
图4 升阻比随马赫数的变化Fig.4 Variation of lift-to-drag ratio with Mach number
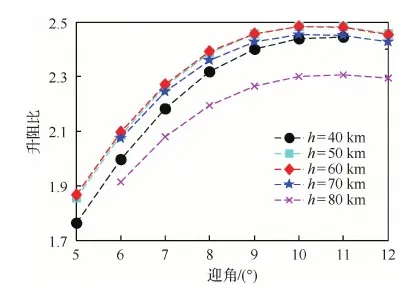
图5 升阻比随迎角变化Fig.5 Variation of lift-to-drag ratio with angle of attack
4 典型弹道模态稳定性分析
4.1 优化弹道模态

优化计算得到最大射程弹道高度和马赫数变化曲线如图6(a)所示,其飞行时间为3 423 s,射程为18 343 km。最小射程弹道如图6(b)所示,其飞行时间为1 500 s,射程为7 606 km。
为从稳定性角度分析不同极限弹道的特性,这里分别计算了最大、最小射程弹道的模态特性,即沿弹道求解特征方程的特征根。早期关于高超声速飞行器纵向长周期运动的研究表明,当考虑大气密度随高度的变化时,高超声速飞行器相较于一般速域的飞行器,增加了一个长周期模态,即高度模态,同时也存在两个常规模态,即沉浮模态和短周期模态。本文通过模态分析,同样也得到3种模态和对应的5个特征根。
首先,分析最大射程弹道模态稳定性。由于5个特征根中的一个实根与其他4个根的数量级相差较大,因此模态图分别在两幅图中画出,分别对应一个实根与其他4个根。最大射程弹道对应的根轨迹如图6(c)和图6(e)所示。图6(e)为一个大实根对应的模态,即高度模态,根轨迹基本位于负实轴上,这表明高度模态是稳定的且呈现非周期、快速衰减特性。图6(c)中一对位于复平面左半平面的共轭复根对应短周期模态,即表征迎角和俯仰角速率的自由扰动稳定性变化。该短周期模态频率沿弹道呈现由低到高变化的趋势,且在再入初始阶段,由于动压较低,短周期模态的频率与长周期模态频率相当。图6(c)中位于复平面实轴附近的两个根为沉浮模态,该模态对应的根轨迹在实轴附近。在再入初段,沉浮模态为一对稳定的共轭复根,进入中段和末段,沉浮模态变为两个实根,且趋于不稳定。图6(d)和图6(f) 为最小射程弹道模态分析图。类似的,图6(f)为最小射程弹道高度模态图,与最大射程高度模态相比最大射程具有更大的负实根,说明对应的状态衰减更快。图6(d)为最小射程弹道短周期模态和沉浮模态图:其中短周期模态也是稳定的,其频率由小变大再变小;最小射程弹道的沉浮模态与最大射程弹道有相似特性,不同之处在于其位于左半平面的实根数目明显增多,即沿最小射程弹道,稳定的沉浮模态特征根增多。
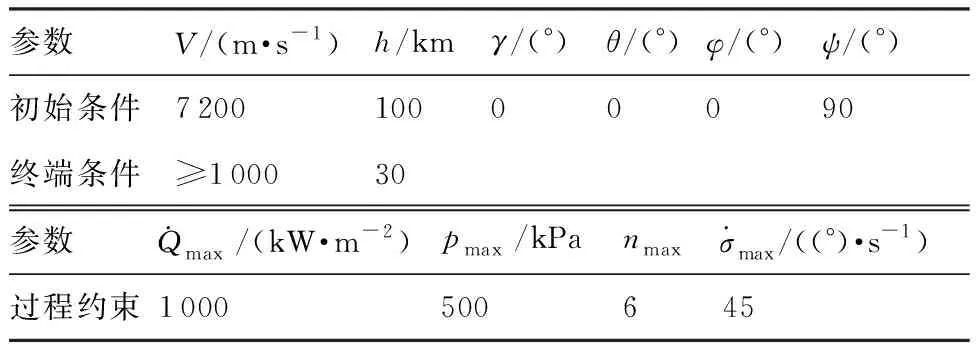
表1 弹道条件和过程约束Table 1 Conditions and process constraints of trajectory
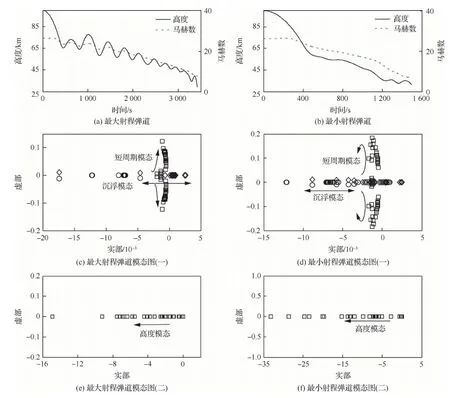
图6 优化弹道模态分析Fig.6 Modal analysis of optimal trajectories
4.2 无约束跳跃弹道模态
前面分析了考虑过程约束的最大、最小射程弹道的模态特性,为了对比分析更多形式的高超声速再入弹道模态特性,本节计算了不考虑路径约束的最大射程弹道和无约束跳跃弹道,并进行模态稳定性分析。
上述两种弹道的计算方法为:不考虑过程约束的最大射程弹道仍采用文献[22]的优化方法,只是无动压等过程约束,初始条件和终端约束同表1,计算得到该弹道飞行时间为3 926 s,射程为22 144 km,其高度、马赫数曲线如图7(a)所示。而无约束跳跃弹道直接生成,初始高度速度同表1,初始弹道倾角由0°改为5°,以实现弹道在高度空间的大幅度跳跃,其侧倾角为取0°,即升力朝上,迎角仍采用标准弹道迎角剖面,结束条件为高度下降到30 km。跳跃弹道高度、马赫数曲线如图7(b)所示,飞行时间为4 859 s,射程为27 732 km。
两种弹道的模态特性如图7(c)~图7(f)所示。两种弹道的高度模态均为负的大实根,且跳跃弹道的高度模态衰减更快。无过程约束最大射程弹道与考虑约束的最大射程弹道相比较,射程增大了约18%,但沉浮模态的不稳定状态增多。跳跃弹道与考虑约束的最大射程弹道相比,射程增加了约33%,但短周期模态出现了不稳定点,位于正实轴上,对应弹道为初始上升段。跳跃弹道的沉浮模态没有出现共轭复根,均位于实轴上,且大部分都位于复平面右平面不稳定区域。
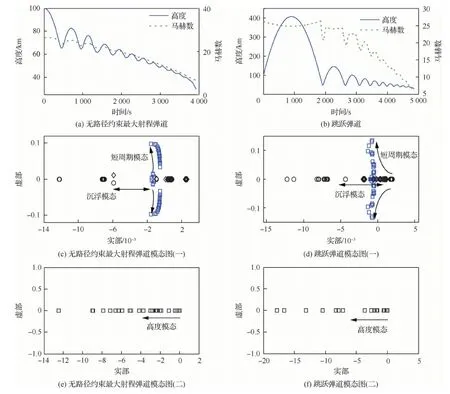
图7 两种无约束弹道模态分析Fig.7 Modal analysis of two types of unconstrained trajectories
综合分析4条典型弹道(图6、图7)的模态特性可以得出以下结论:① 当考虑大气密度随高度变化时,高超声速再入飞行器具有两个长周期模态,即高度模态和沉浮模态,且高度模态为稳定的非周期模态;② 考虑过程约束的最大射程弹道和最小射程弹道都具有稳定的短周模态,且最小射程弹道稳定的沉浮模态特征根更多。
从无约束最大射程弹道和跳跃弹道的模态分析结果来看,高超声速再入飞行器,在高度范围内跳跃变化虽然能够在很大程度上增大射程,但同时会使短周期模态和沉浮模态产生更多不稳定特征根。因此,从稳定性的角度,可以对弹道设计提出建议:应避免所设计的弹道产生太大的跳跃,即使是牺牲一些射程上的性能。
4.3 最大射程弹道典型状态
前面分析了典型弹道的模态特性,现选取其中最大射程弹道上的再入初段、滑翔段和再入末段的3个状态点作为典型状态(见表2),给出具体的特征根并进行稳定性分析。典型状态点对应的模态特征根和无阻尼自振频率见表3。分析表3 可知:再入初段短周期和长周期模态的频率都比较低,没有明显的短周期和长周期区别;滑翔段短周期模态频率明显增大,沉浮模态由稳定的复根变为两个实根,且有一个为不稳定实根,高度模态变为大的负实根;再入末段,短周期模态和高度模态无阻尼自振频率继续增大,且都是稳定的。
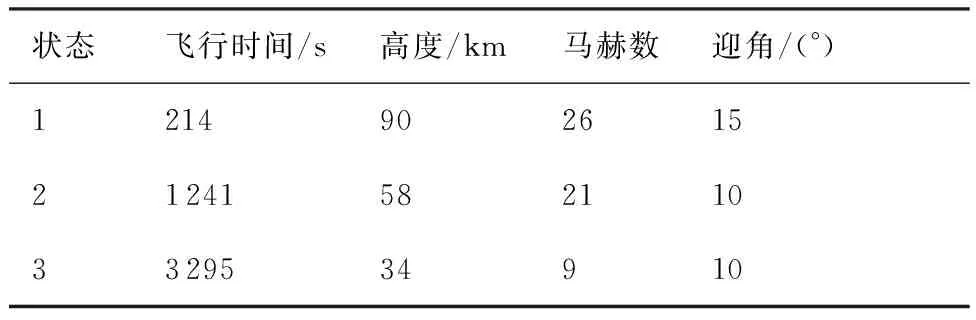
表2 典型飞行时刻状态参数Table 2 State parameters of typical flight time
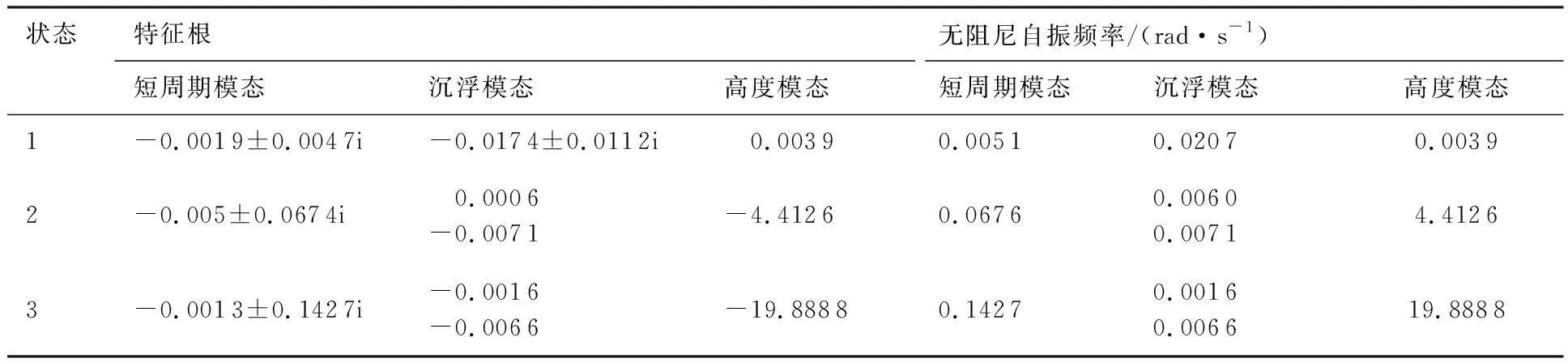
表3 典型飞行时刻特征根及频率Table 3 Eigen values and frequencies of typical flight time
5 结 论
本文分析了高超声速再入飞行器的纵向模态稳定性。引入基准运动和小扰动运动概念,建立无动力再入纵向动力学小扰动运动方程,然后获得状态方程和转移矩阵,在此基础上进行沿弹道的纵向模态分析。针对最大射程弹道、最小射程弹道和跳跃弹道以及最大射程弹道典型状态的模态分析,得出以下结论:
1) 再入初段短周期模态和长周期模态的频率都比较低,没有明显的短周期和长周期区别。
2) 高超声速再入飞行器具有两个长周期模态,即高度模态和沉浮模态,且高度模态为稳定的非周期模态。
3) 考虑过程约束的最大射程弹道和最小射程弹道都具有稳定的短周模态,且最小射程弹道稳定的沉浮模态特征根更多。
4) 高超声速再入飞行器,在高度范围内跳跃变化虽然能够在很大程度上增大射程但同时会使短周期模态和沉浮模态产生更多不稳定特征根。
高超声速飞行器纵向模态分析,即自由扰动运动的稳定性分析可为飞行器总体设计、制导控制律研究等方面提供重要参考。