基于LabVIEW的烟气速度场实时监测系统
2019-08-14刘鹏飞陶依贝寇潇文陈海轩
刘鹏飞,周 宾,陶依贝,寇潇文,陈海轩
(东南大学能源与环境学院,江苏南京 210096)
0 引言
随着社会经济的发展,我国的燃煤电站逐年增加,直接导致了NOx的大量排放,也带来了酸雨、臭氧层破坏、全球变暖等环境问题[1]。因此,控制燃煤电站NOx排放水平刻不容缓[2-3]。对此,国家已经颁布了多部法规限制燃煤电站的NOx等的排放水平[4],严格控制大气污染物排放,力求尽快实现全面超低排放改造。
在燃煤电站中,SCR烟气脱硝效率直接影响NOx的排放,而SCR烟气脱硝效率受催化剂、烟气流场等多种因素的影响[5]。保证系统内烟气流场的均匀分布有助于提高脱硝效率,降低NOx排放,是实现机组超低排放的关键。因此,实现SCR系统入口烟气流场的实时准确测量显得尤为重要。目前,用于气流速度测量的方法主要有皮托管测量法[6]、静电测量法[7]激光多普勒测速法(LDV)[8]、粒子图像测速技术(PIV)技术[9]、声波法[10]和光闪烁法[11]等。其中,皮托管测量法、静电测速法、光闪烁法大多为单点式,只能得到单点的气流速度参数,由于烟道截面上流速分布不均匀,单点测量不能满足测量的需求。Kumara等人用LDV和PIV两种方法测量了水平管内油水两相流动,发现用PIV测量平均轴向速度比LDV效果更佳,但PIV对光学干扰比较敏感[9]。徐俊等人采用LDV对180°矩形弯管内流场进行了测量,得到了时均速度、湍流强度等数据,但是LDV对测量流体有一定透明度要求,无法测量高浑浊流体;而且对防震要求较高,在线测量有一定难度[8]。陈栋等在不影响烟气烟道原有流场的前提下,基于声学技术对电站锅炉烟气流速进行了非接触式实验测量,但是声波在气体中衰减明显,且低频声波受环境噪声的干扰严重,对于环境恶劣的场合,从设备到处理算法上仍有不少的难点和局限性[10]。综上,针对燃煤电站SCR系统入口的烟气,鲜有适用于速度场测量的方法公开发表。
本文在单点测速技术的基础上,通过布置测点阵列和超分辨率重建来实现速度场的测量。皮托管测速方法得到的速度需要通过密度和校正系数进行修正,不利于长期稳定测量。而静电测速法得到的速度为绝对速度,避免了待测流体参数等外界条件的影响。因此,本文在静电测速技术的基础上,优化了静电传感器的结构,实现了高温高灰烟气流速的稳定测量,并利用超分辨率重建算法和LabVIEW平台完成了速度场实时监测系统的设计。
1 流速测量原理
静电测速法是基于流动颗粒的静电特性而实现两相流参数检测的。待测流体中的颗粒在流动过程中,由于颗粒与颗粒之间、颗粒与管道内壁之间反复地发生接触、碰撞、摩擦和分离过程而产生荷电颗粒。待测流体中的荷电颗粒流经静电传感器时,由于静电感应原理在静电传感器上形成电荷的转移,如图1所示。利用电荷检测电路对静电感应信号进行检测[12],结合信号处理手段即可解析出上下游静电感应信号中包含的速度信息。

图1 静电传感器产生电荷的过程
静电传感器上的2组感应信号非常相似,但是存在相位差,可以通过相关函数来解析两个信号的相位差[13]。定义信号x(t)和y(t)的互相关函数为

(1)
互相关函数是2个信号之间设定时差τ的函数,其峰值对应的τ则表示了2组离散信号之间的时间差τ0,结合上下游感应电极的间距L,即可计算出气体的流速v:
(2)
式中k0为速度无量纲校正系数,由实验标定确定。
在实际气流流动条件下,利用激光多普勒测速仪与静电传感器同步测量,速度测量系统记录测量数据并保存,取与激光多普勒测速仪同时间、同区间测量值的平均值与激光多普勒测速仪测量值组成一个数据对,运用一元线性回归对相关系数大于0.9的有效数据点进行拟合,进而获得标定系数k0:
(3)
式中:m为有效数据对的个数;xi和yi分别为第i组静电传感器和激光多普勒测速仪的速度测量值。
2 测量系统
2.1 静电传感器结构
电厂烟道尺寸较大,安装在管道外壁面很难检测到感应信号,因此,本文采用侵入式测量方法实现烟道内局部速度的测量。SCR系统中,烟气温度高达370 ℃,粉尘浓度[14]达到0.068 kg/m3,因此,传感器采用耐高温和耐磨的材料。由于静电测速的测量精度受到上下游信号相关程度的影响,上下游静电传感器间距过小,会使下游传感器产生的感应信号叠加,导致相位差发生变化;两者间距过大,流经上下游静电传感器的荷电颗粒会发生变化,部分电荷被中和或吸附,导致2路信号的相关程度降低。在大量仿真和实验的基础上发现,在间距为20 mm时,可以获得信噪比较高的感应信号。图2为静电传感器结构示意图,屏蔽筒采用耐磨性较好的不锈钢合金制作而成,内壁为陶瓷加工的内衬,在这两者的保护下,探头的耐磨性能大大提升。两个具有相同结构和尺度的静电感应环安装在陶瓷套管和陶瓷内衬之间,沿着流动方向布置,当流体经过时,2个静电感应环沿气流流动方向依次输出相应的静电感应信号,经微弱电荷检测放大电路的放大、滤波处理后得到2路电压信号,由数据采集卡传输到PC端。
对采集到PC的2路静电感应信号进行滤波处理和幅值修正,首先对信号中的50 Hz工频干扰和2 kHz以上的高频噪声进行滤除,其次对2路信号进行幅值修正运算,将2路信号的幅值调整到同一幅值。最后,根据式(1)和式(2)求得静电传感器感应环内的气流速度。

图2 静电传感器结构示意图
2.2 传感器阵列布置及速度场重建方法
在烟道中烟气速度场的测量中,需要根据流场的速度分布情况,设计比较合理的测点来满足速度场的测量需求。本文采用均匀分布的方式进行系统开发,在烟道中布置M×N的静电传感器阵列,测量示意如图3所示。其中a、b分别为矩形烟道截面的长宽。

图3 M×N的静电传感器阵列示意图
通过对M×N组静电感应信号做互相关运算,得到烟道截面上的实测节点速度矩阵,表示为
(4)
利用Fluent模拟计算软件对烟道内的烟气速度场进行CFD仿真,可以获得在不同负荷工况下测量截面上的速度场分布,并结合现场实地测量数据,对仿真速度场进行修正得到相对准确的速度场分布。将不同负荷工况下的速度场与全负荷工况下速度场的比值计作为分布比,取不同负荷工况下分布比均在0.99~1.01之间的点作为流场分布特征点。本文对南京某电厂SCR系统入口AIG前的烟气速度场进行仿真和实测,得到的流场分布特征点占整个流场的1/5。同时,烟道壁面处由于边界层效应,流速为零,将流场分布特征点和边界速度作为流场的先验信息,结合实测的节点速度和超分辨率重建算法即可得到分辨率更高的速度场分布。
超分辨率重建主要有频域方法、非均匀插值方法、最大后延概率方法等,从工程应用的重建精度和算法实现复杂度来讲,非均匀插值法作为最简单直观的超分辨率重建方法之一[15],运行效率高,效果也优于一般的频域方法。本系统中结合二维双三次插值方法和先验信息对[v]M×N进行超分辨率重建,进一步提高烟道内速度场的分辨率,从而实现烟道截面上的速度场测量。
2.3 基于LabVIEW的测量系统设计
基于虚拟仪器的实时测量系统,是工程测量技术及仪器研究综合集成的最新成果,是实现计算机自动分析测量结果的捷径。通常情况下,LabVIEW的开发速度远优于传统的编程语言,且在数据采集和人机交互方面有着十分明显的优势[16-17]。因此,本文依托LabVIEW技术和NI数据采集卡,结合静电感应测速原理,开发出一套基于LabVIEW的速度场实时监测系统。该测量系统的主要功能包括:多通道信号同步采集、数字滤波、互相关速度计算、速度场超分辨率重建、速度场实时显示及存储,系统流程如图4所示。

图4 LabVIEW速度场实时监测系统流程图
前面板主要分为测量参数设置和数据处理及显示部分。图5中左侧为参数设置部分,首先根据传感器信号线在NI采集卡上的接线设置DAQ采集的物理通道,然后设置采样率、采样数、电极间距、滤波参数、烟道截面长宽和测量节点的数量。右侧为实时采集的静电感应信号、实时速度场云图和M×N个节点流速的历史数据及曲线。
程序框图主要分为4部分,包括DAQ多通道实时采集模块、速度计算模块、超分辨率重建模块和数据存储模块。静电传感器阵列的感应信号获取由数据采集卡和LabVIEW设计的DAQ同步采集程序共同完成。由于商用的采集卡通道数都有一定的限制,为了满足更高的测量分辨率,本文设计了多板卡、多通道的同步采集程序,数据采集部分的程序如图6(a)所示。通过对不同的采集卡共享参考时钟源和参考时钟速率来实现多板卡的时钟一致,利用顺序结构和数字触发保证多路采集任务的同步启动。

图5 测量系统前面板
烟气流速的计算过程通过数字滤波、幅值修正、相关运算共同实现,数据处理程序如图6(b)所示。首先利用数字滤波模块将信号中的高频噪声滤除,并对信号做幅值修正,得到修正处理后的静电信号。然后依据式(1)求得上下游静电信号之间的时间差,最后根据式(2)和静电感应环间距计算得到烟气的流速。
超分辨率重建算法通过LabVIEW实现的过程包括3个步骤,计算程序如图6(c)所示。首先,根据节点位置和个数读取相应的边界速度信息和流场分布特征点,然后按照烟道截面的长宽和目标分辨率对速度场进行分割,并得到相应的位置矩阵,最后利用先验信息和节点速度信息实现速度场的超分辨率重建。
数据存储模块将实时测量得到的节点流速和高分辨率速度场矩阵保存到本地,方便后期进行查看和分析,程序如图6(d)所示。本地存储文件选用Dat格式,使用计算机的系统时间作为区别字符对文件进行命名。为了防止文件数量过多和缓冲数据量过大,间隔10 min进行一次存储操作。
3 实验验证
为验证该系统在现场速度场测量中的稳定性、准确性、实时性,进行了SCR系统入口AIG前烟气的局部流速测量实验和速度场模拟测量验证。

(a)DAQ多通道实时采集模块

(b)速度计算模块

(c)超分辨率重建模块

(d)数据存储模块图6 测量系统程序框图
3.1 局部流速测量实验
利用制作的静电传感器在南京某电厂SCR系统AIG前的烟道上对烟气流速进行测量,选取的测量截面长16 m、宽6m,在长边上均匀选取了8个测孔,测量深度分别为1、3、5 m。在相同负荷工况下,利用S型皮托管和静电传感器对烟气的流速同时进行测量,表1为皮托管的测量参数和烟气的状态参数。图7为静电传感器和皮托管的速度测量结果对比。

表1 皮托管测量参数

图7 静电传感器和皮托管的测量结果对比
测量结果表明,静电传感器测量值与皮托管测量值基本吻合,两者的绝对误差最大为0.36 m/s,相对误差最大为2.63%。在测量过程中,静电传感器的速度测量值标准差最大为0.30 m/s,变异系数最大为1.62%,可以满足工业现场流速测量的需求。因此,优化过的静电传感器可以实现高温高灰烟气流速的实时、准确、稳定测量。
3.2 速度场模拟测量验证
为了验证基于LabVIEW的速度场实时监测系统,利用现场实测数据模拟SCR入口速度场的实时测量。借助数据采集卡和LabVIEW采集程序对上述24个测量节点处的静电感应信号进行采集和存储,用来模拟现场静电传感器的感应信号,将其输入LabVIEW监测系统的输入通道。基于LabVIEW的速度场实时监测系统模拟运行过程中采集到的48路静电传感器感应信号,如图8(a)所示,通过超分辨率重建得到的高分辨率速度场分布如图8(b)所示。通过系统时间统计可知,速度场测量的更新时间为1.21 s/次。
从系统模拟运行结果可知,该截面内的速度分布变异系数Cv为40.01%,分布比较不均匀。根据流速的分布情况,可实现对AIG层的喷氨量做相应的控制。基于相似准则,按照现场SCR系统的规格搭建了冷态模化试验装置,图8(c)为在设定工况下使用皮托管测量得到的速度场分布,与LabVIEW的重建结果相比,两者轮廓基本吻合,但是冷模试验中测点远多于现场流速测点,因此得到的速度场包含了更多的流场细节。
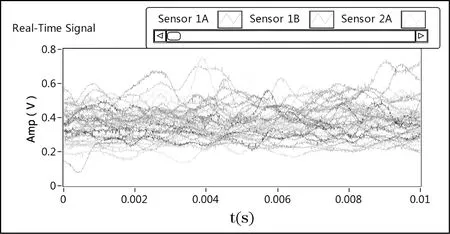
(a)48路实时静电传感器信号

(b)LabVIEW高分辨率速度场分布

(c)冷模试验速度场分布图8 基于LabVIEW的速度场实时监测系统模拟运行结果
3.3 结果讨论
SCR系统AIG前烟气的局部流速测量结果表明,本文优化后的静电传感器可以实现高温高灰恶劣环境中烟气的流速测量。与皮托管相比,静电测速法有效避免了烟气密度、皮托管校正系数等的干扰,实现了真正的绝对速度测量,同时实现了实时测量。本文在超分辨率重建速度场的过程中,采用无滑动壁面条件,可适用于常规的烟道速度场分布。针对结构比较特殊的烟道或精度更高的测量需求,需要结合CFD仿真等技术,重新设定速度场的边界条件和流场分布特征点参数。通过现场实测和仿真得到的先验信息越精确、数据点越多,重建出来的速度场也越准确。因此,通过分析历史数据获取更多的流场信息,可以进一步提高速度场测量的准确性。
4 结束语
(1)针对SCR入口的烟气特性,本文基于静电测速原理,对静电传感器结构进行了优化,实现了其在高灰、高温环境中的稳定运行。并利用数据采集卡和LabVIEW软件开发了一套多板卡同步采集和实时处理系统,实现了局部流速的实时测量和速度场的实时重建。
(2)利用优化后的静电传感器和LabVIEW测量系统对SCR入口烟气的局部流速进行测量,与皮托管相比,本系统测量值的绝对误差小于0.36 m/s,标准差小于0.30 m/s,表明该测量系统可以实现烟气流速的实时、准确、稳定测量。
(3)利用现场实测数据模拟了SCR入口烟气速度场的实时测量,LabVIEW重建速度场与冷模试验速度场基本吻合,表明该系统可以实现烟气速度场的实时测量,为SCR系统的运行调节提供了有效的技术参数。
