基于Flex无线传感技术的边坡位移监测研究*
2019-08-14任芳昉洪成雨张孟喜
任芳昉,洪成雨,2*,张孟喜,李 操
(1.上海大学土木工程系,上海 200444;2.深圳大学土木与交通工程学院,广东 深圳 518061)
在岩土工程领域,为了确保岩土体和与其相依的建筑物的稳定,建立起大规模、全方位、多维度及多场地的岩土工程监测是十分必要的[1]。岩体和土体变形情况的监测是建筑、交通、矿山、水利及边坡等工程的一项重要研究课题[2]。因此,理论分析、室内外测试和工程实践是岩土工程分析三个重要的方面[3]。在室内外测试中,首先,岩土工程要求测量设备可以进行长期观测且不影响其使用效果;其次,测量设备需承受各种恶劣的岩土环境,使其传输数据不受天气影响;最后岩土工程一般测量值大、测点多,故要求测量设备量程大且可以大面积埋设[4]。
基于上述岩土工程独有的特点,不少学者考虑将传感器布设在岩土中以达到监测土体的效果。传感器是一种以一定的精确度把被测量转化为与之有确定对应关系的、便于应用的某种物理量的测量装置[5-7]。1988年,我国首次将无线电遥感技术与位移传感器技术相结合用于边坡监测当中[8]。90年代后期,SW型位移计作为机械位移计的一种,其安装孔径为45 mm~60 mm,锚头抗震性能好,适合在软弱或坚硬围岩中安装,被广泛应用于跨度小于10 m的岩土工程位移监测当中[9]。1998年德国慕尼黑水电站利用分布式光纤测温系统证实引水渠保护层的渗漏是由河谷右坡增加的地表水流引起的,该传感系统利用光纤的光时域反射(OTDR)技术,具有自标定、自校准和自检测功能,即使在光纤受损时也可继续工作[10]。2011年,陈伟等基于电磁波时域反射原理的远程遥感测试技术,设计出一套完备的时域反射测量(TDR)传感器,通过大型模型试验,验证出该套传感器可以有效地实时监测土体质量含水量和干密度的变化情况[11]。综上所述,传感器在岩土工程领域有着良好的应用前景[12-14]。
本研究提出了一种新的基于Flex传感技术的无线位移监测系统,该系统可对边坡位移进行无线实时监测,有着良好的精度和准确性。
1 Flex传感器技术
1.1 Flex传感器原理
Flex弯曲传感器是一种将具有波状纹理的导电油墨或者其他金属/半导体粒子混合到一种弹性体中,并在通道里嵌入离子液体(IL)作为可变导体的设备。该传感器由于应用电路简单,输出信号易于处理,已广泛应用于农业、医疗器械、乐器和机器人等领域[15-17]。其工作原理是Flex传感器的输出电阻随弯曲角度的变化而变化,即将物理量转化为电阻值。
通过Flex弯曲传感器测得的角度变化,利用简单的几何公式,我们可得到不同深度处的水平位移。
(1)
式中:θi为第i个弯曲点处的角度变化,主要通过Flex弯曲传感器测得;Si为第i+1个弯曲点处的总水平位移,h为弯曲长度,即转轴一侧保护壳的长度。
1.2 Flex传感器设计
本实验使用的Flex传感器形状可以定制,型号为Flex sensor 4.5″,长约为112.24 mm(可测长度为95.25 mm),宽6.35 mm;厚有0.43 mm;电阻公差为±30%;工作温度在-35 ℃~80 ℃;工作湿度在10%~90%之间,无凝结。不发生弯曲时,电阻为25 kΩ;发生弯曲时,电阻变化范围为45 kΩ~125 kΩ。该传感器有着超薄的封装,可以将它固定在被测曲面上,配合模拟输出,方便采集处理弯曲信息。其结构系统示意如图1所示,包括电池、蓝牙采集板以及Flex弯曲传感器。
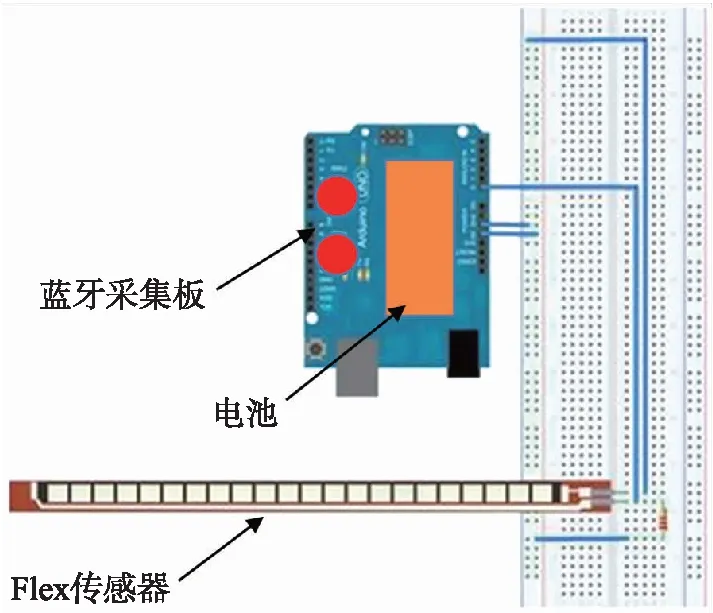
图1 Flex传感系统结构图
由于传感器的整体弯曲都会给电阻带来变化,故为了限制、集中传感器的弯曲点,提高传感器的测量精度,我们用3D打印制作一个卯榫组合的外壳,选择日本精工株式会社(NSK)的轴承,将传感器的弯曲点控制在NSK轴承处,其设计结构和组合原理如图2、图3所示。

图2 结合3D打印技术制作的新型无线弯曲传感器

图3 Flex弯曲传感器组合原理图
本试验设计使用的Flex位移传感器有一种,是由三个Flex传感器、三个NSK轴承和三个3D打印的外壳组成的一根传感器,总长度为295 mm。
1.3 Flex传感器的标定
Flex弯曲传感器的阻值并非线性变化的,但是由于该传感器是用来测量小范围内的弯曲角度变化,于是可近似地认为电阻与弯曲角度呈线性正比关系[18]。
标定前,将Flex弯曲传感器嵌入3D打印制作的封装外壳中,利用数显角度尺对其进行标定,具体操作过程如图4所示,将嵌入好的Flex传感器两边边缘紧贴着角度支架两边,使其弯曲程度与数显角度尺一致,改变数显尺的弯曲角度,每变化5°记录一次Flex弯曲传感器的示数,最大弯曲到60°。

图4 标定中的弯曲传感器
实验使用了三根Flex弯曲传感器,分别对它们进行了标定,其结果如图5所示,显示了传感器信号随弯曲角度的变化规律。根据图5可以得到,Flex弯曲传感器在0°~60°范围内输出的电阻信号与弯曲角度呈线性关系,且经计算可得传感器信号每变化一个单位,角度变化0.3°~0.4°,即Flex传感器的测量分辨率为0.3°~0.4°,所以可将其用于边坡位移监测。

图5 Flex传感器标定结果
2 基于Flex传感器的边坡模型
2.1 边坡模型
试验模型箱为长方体,尺寸(长×宽×高)为600 mm×280 mm×400 mm。其中箱底采用10 mm厚的钢板,箱壁4个侧面均采用标有刻度线的有机玻璃。
模型箱中填入高130 mm的标准砂,压实作为土坡的基层,其中标准砂的参数如表1。接着每填入50 mm高的土层,就压实一次,直至填至试验预定高度330 mm。土坡的倾斜角度为35°。

表1 试验用标准砂土体参数
2.2 传感器的布置
Flex传感器在边坡模型中竖直布置一列,这列传感器是将Flex传感器插入图2所示的外壳中,通过卯榫和NSK轴承所连接的。NSK轴承所在位置即监测点,在距模型箱左侧360 mm处,布置A3、A4、A5号Flex传感器组合的长295 mm的传感器,其具体埋设尺寸见图6。同时,我们使用了两根LVDT位移传感器,将其垂直边坡放置,高度分别是270 mm、195 mm。试验边坡中的加载主要是通过电子万能材料试验机来施加的,最终的试验装置如图7所示,以及加载原理与边坡位移的力学模型如图8所示,其中均布荷载是通过坡顶的硬木块均匀传递的,Flex传感器的倾斜变化量代表边坡位移的大小。
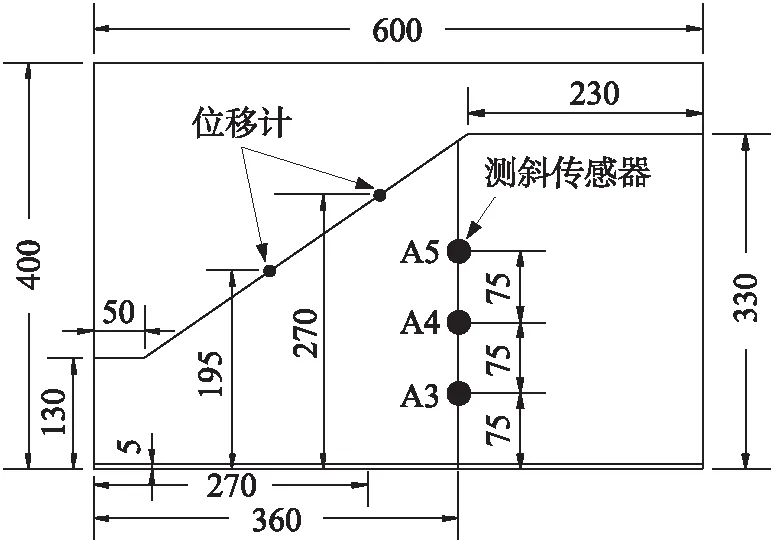
图6 Flex传感器布置图(单位:mm)
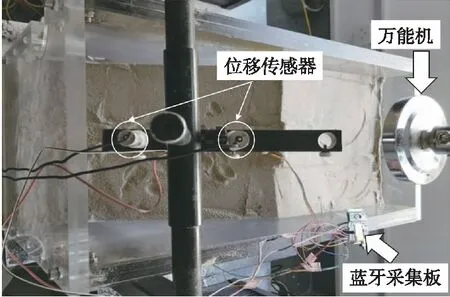
图7 安装无线Flex传感器的边坡模型

图8 加载原理与边坡位移的力学模型(mm)
2.3 试验过程
打开万能机、位移传感器的监测软件和Flex传感器的蓝牙设备,设置万能机以0.2 mm/s的速度给坡顶施加荷载,待加载曲线图出现瞬时下降趋势时,表明边坡已经失稳,停止加载,记录万能机、位移传感器和Flex传感器的数据。
3 试验结果与分析
3.1 无线Flex传感器结果
由上述的Flex传感器边坡加载试验,我们对A3,A4,A5这三个Flex传感器的数据进行计算分析。
图9为A3、A4、A5三个Flex传感器的示数随时间变化图。从图7中可以看出,A3、A4两个Flex传感器的信号随时间在逐渐减小,最终破坏时,分别达到627和585;A5传感器与其余两个信号走势相反,最终达到597。图10为A3、A4、A5三个Flex传感器弯曲角度随时间变化规律,该图是将Flex传感器的实测数据代入标定试验的公式中求得监测点的角度变化。从图中我们可以看出,三个传感器弯曲角度的范围都在-10°~10°之间;(由标定试验知道,该传感器的测量分辨率为0.3°~0.4°,对于该边坡模型中的小角度变化,我们通过标定试验计算的结果是有效的。)A3和A4传感器向内弯曲,边坡破坏时角度分别达到7.15°和3.06°,而A5传感器向外弯曲,最终角度变化了4.23°。
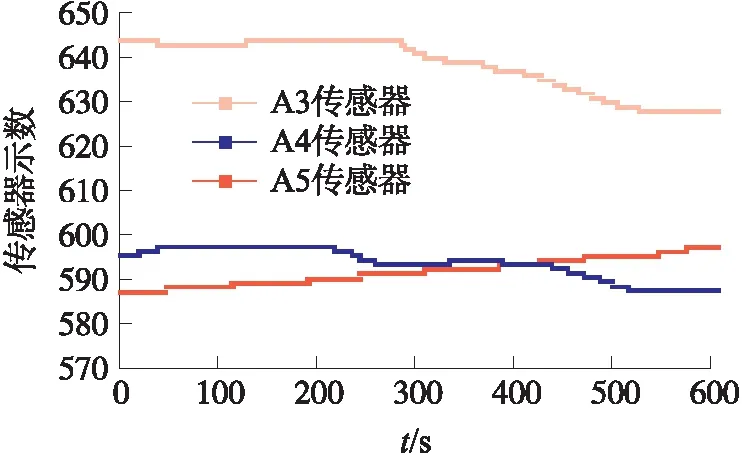
图9 Flex传感器示数时程曲线
3.2 边坡水平位移分析
将A3传感器转轴下部的封装外壳设计成直角,在模型箱底端将其固定作为固定端,由于边坡底部位移很小可忽略,我们由图10 Flex弯曲传感器在转轴处的角度变化数据结果,通过式(1)计算作出A3、A4、A5三个传感器在转轴处发生总水平位移(即相对于原传感器的位置)的时程曲线,如图11所示。从图中我们可以看出,时间一定,Flex传感器对应转轴顶端发生的水平位移随着高度的增加而增大;A3、A4和A5传感器上部转轴发生的总水平位移最终分别达到了10 mm,23 mm和33 mm。
通过位移传感器采集的数据,我们可以得到边坡上的倾斜位移随时间变化的规律,如图12所示。从图中我们可以看出,在200 s前,270 mm高度处位移计测出的倾斜位移值小于195 mm高度处测出的倾斜位移值;在200 s以后,270 mm处测出的倾斜位移值大于195 mm高度处测出的倾斜位移值;最终放置在270 mm处的位移传感器测出的土体位移为25.324 mm,放置在195 mm处的位移传感器测出的位移为19.234 mm。

图10 Flex传感器弯曲角度随时间变化关系

图11 不同深度点处的水平位移时程曲线

图12 位移计得到的倾斜位移时程曲线
我们利用图10中Flex传感器的最终弯曲角度和式(1)推算出195 mm和270 mm处Flex传感器所测得的土体水平位移,再利用式(2)计算出位移传感器所测得的水平位移;比较两者的位移,结果如表2所示。
Sh=Sv×cosα
(2)
式中:α为位移传感器与水平面的夹角,在边坡最终破坏时195 mm处的α角度约为35°,270 mm处的α角度约为20°。Sh为h高度处的水平位移,Sv为h高度处的倾斜位移。
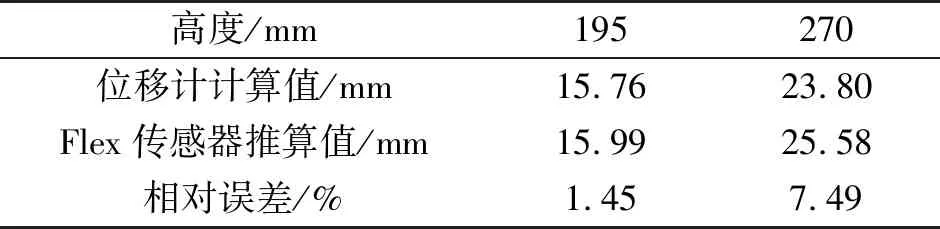
表2 位移传感器与Flex传感器对比
注:相对误差=|Flex传感器推算值-位移计测出值|/位移计测出值
4 结论
本研究研发了一种新的基于Flex传感技术的无线位移监测系统,通过将其应用到边坡模型监测之中,得到如下结论:①将3D打印和Flex弯曲传感技术相结合,开发出一种新型的无线传感器,通过该传感器可测得边坡的角度变化,从而反推边坡位移。②通过标定试验,我们得出Flex弯曲传感器在0°~60°范围内弯曲角度与其信号有着良好的线性关系,且其测量灵敏度可达到0.3°~0.4°。③将该传感器应用于边坡位移监测中,监测结果与传统传感器监测结果吻合良好。
考虑到目前我们的工况有限,未来会在更大的模型或现场试验中做进一步的研究。
