行李表面主被动柔顺贴标方法研究
2019-08-14姚锦博田忠武
武 伟 姚锦博 田忠武
(中国民航大学航空工程学院 天津 300300)
0 引 言
乘机旅客在办理行李自助托运业务时,需要自行完成行李标签的打印、拴贴等工作,过程繁琐,效率较低。随着智能技术的发展,将机器人技术引入自动贴标领域,由机器人完成这一系列的工作,可以有效提高行李托运的效率。图1所示为本文研制的可适用于不同行李的自动贴标机构,其具有标签实时打印、自动剥离与柔性贴标等功能。

图1 行李自动贴标机
旅客行李的式样繁多,箱体材质与表面几何尺寸难以预先确定,并且针对不同的行李,其贴标位置也不同,故采用机器人贴标,需要考虑在环境参数不确定的情况下贴标装置与行李表面接触作业的问题。若接触力过大,会导致旅客行李的损坏,造成不必要的经济损失;若接触力过小,则标签与行李表面的粘合力过小,造成标签在运输过程中脱落,最终导致旅客行李的丢失。
柔顺控制本质上是实现力和位置的混合控制,相较于传统的位置控制,为控制系统增加了柔性[1],柔顺控制分为主动柔顺和被动柔顺两类[2]。其中被动柔顺控制是指借助辅助机构产生对环境接触力的自然顺应;主动柔顺控制是指根据压力传感器的反馈信息按一定的策略去主动控制力[2]。常见的柔顺控制方法有阻抗控制、力/位混合控制和智能控制等[3]。针对上述机器人贴标过程所面临的问题,本文借鉴柔顺控制的思想,设计了一套柔顺贴标机构,利用机构的柔性有效降低贴标过程中外力的干扰,并采用阻抗控制方法实现力的跟踪。阻抗控制是指通过调节力和位置的动态关系来满足力控制的要求[4],传统的阻抗控制是建立在理想化的条件下,即机器人控制参数与环境参数精确已知的前提下,缺乏对未知环境的自适应性,对上述贴标过程并不适用。为此,本文在阻抗控制的基础上研究一种基于神经网络的自适应阻抗控制方法,在阻抗方程中增设自适应项,通过更新阻抗参数来提高控制系统的鲁棒性,可以适应环境信息的变化,并利用神经网络可以逼近任意非线性函数的特性[6],补偿机器人动力学建模的不确定性。利用MATLAB/Simulink搭建了二连杆机器人的仿真实验平台,验证所提方法的有效性。结果表明,该方法面对环境参数不确定的问题具有良好的力跟踪效果,可以更好地适应行李表面环境,确保贴标的可靠性。
1 主被动柔顺贴标方案
1.1 被动柔顺贴标机构
柔顺机构是一种利用构件自身的弹性变形来完成运动和力的传递与转换的机构[1]。图2为本文所设计的柔顺贴标机构,主要由橡胶压辊、弹簧阻尼器、压力传感器、导向杆以及各连接件构成,该机构可以配合机械臂的使用完成贴标动作。其中,压辊表面包裹弹性橡胶材料,可以增加贴标过程中标签与行李表面间的接触面积;依靠弹簧阻尼器的缓冲减震作用可有效降低因力的突变或其他因素带来的外力的干扰,为机构提供柔性,避免压坏行李;压力传感器用来实时检测行李表面的接触力,配合主动柔顺控制实现贴标力的跟踪。
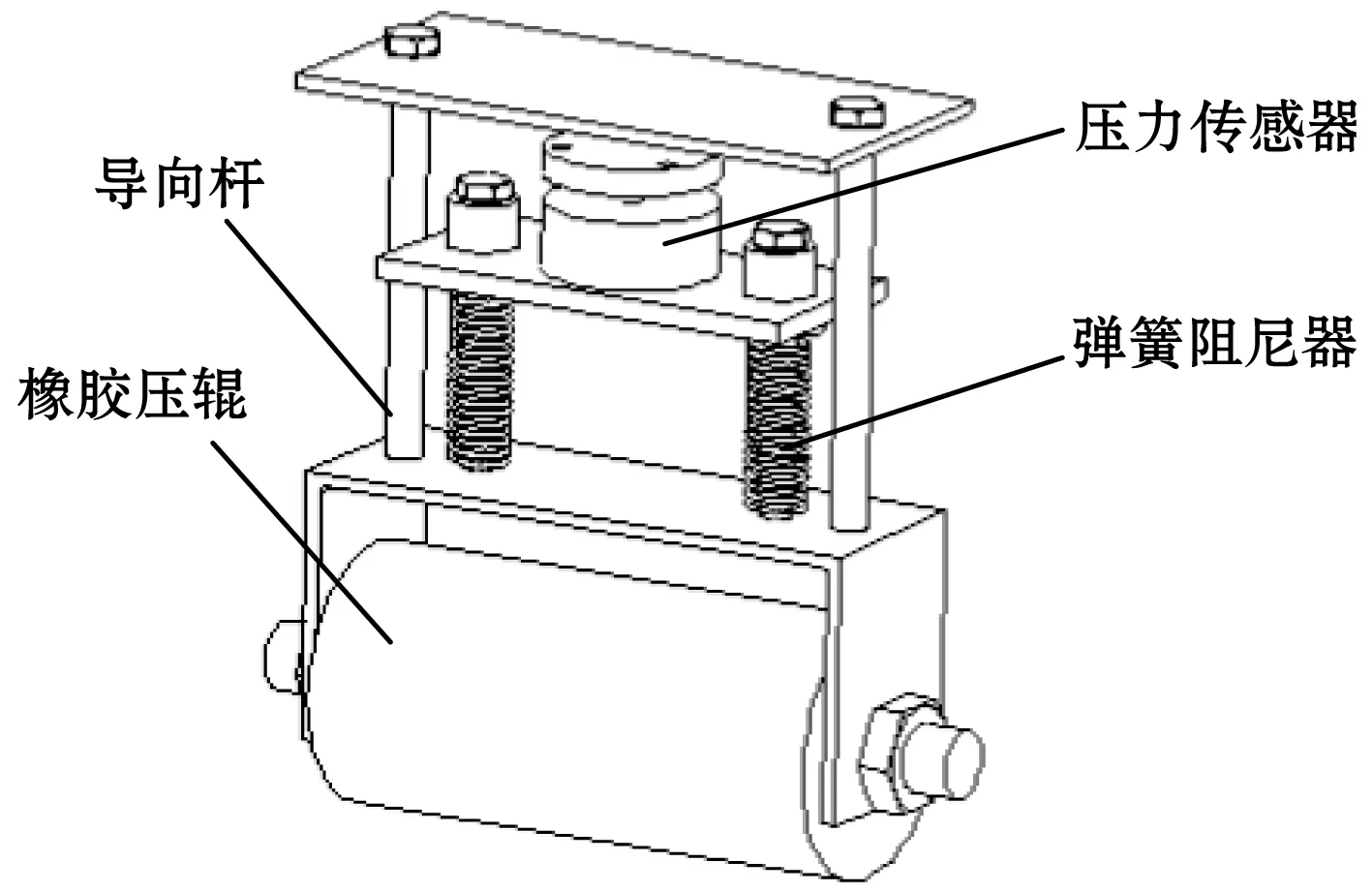
图2 柔顺贴标机构
1.2 阻抗控制模型
建立如图3所示柔顺贴标机构与行李表面接触的阻抗模型图。其中,柔顺贴标机构建模为二阶“质量-弹簧-阻尼”系统,环境建模为一阶弹簧系统[3]。
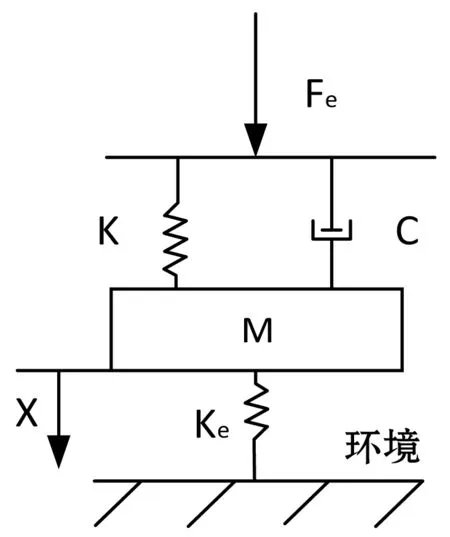
图3 贴标机构阻抗控制模型
在传统的阻抗控制中引入期望力,得到贴标机构与行李表面接触的二阶阻抗控制关系式如下:
Fe=Ke(X-Xe)
(2)
式中:Fe为与行李箱接触产生的作用力,可由力传感器精确测得,Fd为系统预设的贴标控制力,一般为常值,M、C、K分别为阻抗控制器的目标惯性矩阵、目标阻尼矩阵与目标刚度矩阵。E=Xr-X为阻抗系统的位置偏差,X为给定的期望位置,X为机器人末端运动的实际位置。Ke为环境的刚度系数,Xe为行李的实际位置。
令ΔF=Fe-Fd作为阻抗控制系统的输入,输出为位置偏差E,则系统的传递函数为:
K(s)=1/(Ms2+Cs+K)
(3)
根据上述假设,力跟踪误差ΔF可表示为:
ΔF=Fe-Fd=Ke(X-Xe)-Fd=
Ke(Xr-K(s)ΔF)-KeXe-Fd
(4)
将式(3)代入式(4)得:
若稳态误差为零,即ΔFss=0,则可推出期望位置满足以下方程:
由上式可知,要想达到良好的力跟踪效果,期望位置Xr就必须满足式(7)。然而,由于旅客行李的多样性,贴标前无法获取到准确的环境位置与刚度信息,故单纯的阻抗控制无法实现在环境参数不确定的条件下对力的跟踪。
1.3 自适应阻抗控制算法
由于无法获得准确的环境信息,则期望位置Xr无法精确计算,本文用初始的环境位置Xe代替未知的Xr,代入式(1),可得在单一维度上新的阻抗方程为:
本文研究贴标机构与行李表面发生接触后的情况,由式(8)求解微分方程得,当接触力达到Fe=Fd的稳定状态时,为使机械臂满足理想稳定,则K(Xe-X)=0,又Xe-X≠0,故力控方向上的刚度系数应满足K=0。此时,阻抗控制方程可写成:

为保证在存在环境位置估计误差的情况下力跟踪的稳定性,在式(10)增加自适应调整项Ω(t),从而抵消环境误差的影响[5],则自适应阻抗控制方程为:
自适应调整项的表达式为:
式中:λ为控制器的采样周期,η为自适应更新率,且η必须满足:
2 基于神经网络的系统参数辨识
机器人动力学系统为多耦合和非线性的复杂控制系统[6-7],在无法建立精确的动力学模型的情况下,自适应阻抗控制难以得到较好的应用。径向基函数(Radial Basis Function,RBF)神经网络具有良好的泛化能力,它可以在一个紧凑集和任意精度下,逼近任何的非线性函数[8]。因此,本文利用RBF神经网络补偿系统动力学模型中的不确定项,从而提高机器人控制系统的鲁棒性。
n自由度机械手的动力学方程为[9]:


式中:f为估计模型与实际动力学模型的误差项,由RBF神经网络逼近。
定义角度跟踪误差为:
σ=qd(t)-q(t)
(16)
定义误差跟踪函数为:

式中:Λ=ΛT>0。
由系统模型可知,神经网络的输入为角度误差和角速度误差,设计控制律为:

本文设计的RBF神经网络分为三层,包括输入层、输出层和隐含层,其中隐含层的径向基函数采用具有局部响应特性的高斯径向基函数[10]。假设RBF神经网络从输入层到输出层的节点数量分别为n、m、p,隐含层第j个节点的输出为:
式中:j=1,2,…,m,s为n维输入向量,cj为网络中隐含层第j个节点的中心矢量,bj为第j个节点高斯函数的宽度。
理想RBF神经网络的输出为:
y=Wφ(x)
(20)
式中:φ=[h1,h2,…,hn]。
为实现RBF神经网络的非线性逼近能力,通过权值调整控制补偿不确定部分,设计自适应律为:
3 实验验证

式中:J为雅可比矩阵。
建立基于神经网络的自适应阻抗控制系统的原理框图如图4所示。

图4 神经网络自适应阻抗控制算法原理图
选择关节长度为l1=l2=1 m,关节质量为m1=m2=1 kg,c按神经网络输入值的范围取:



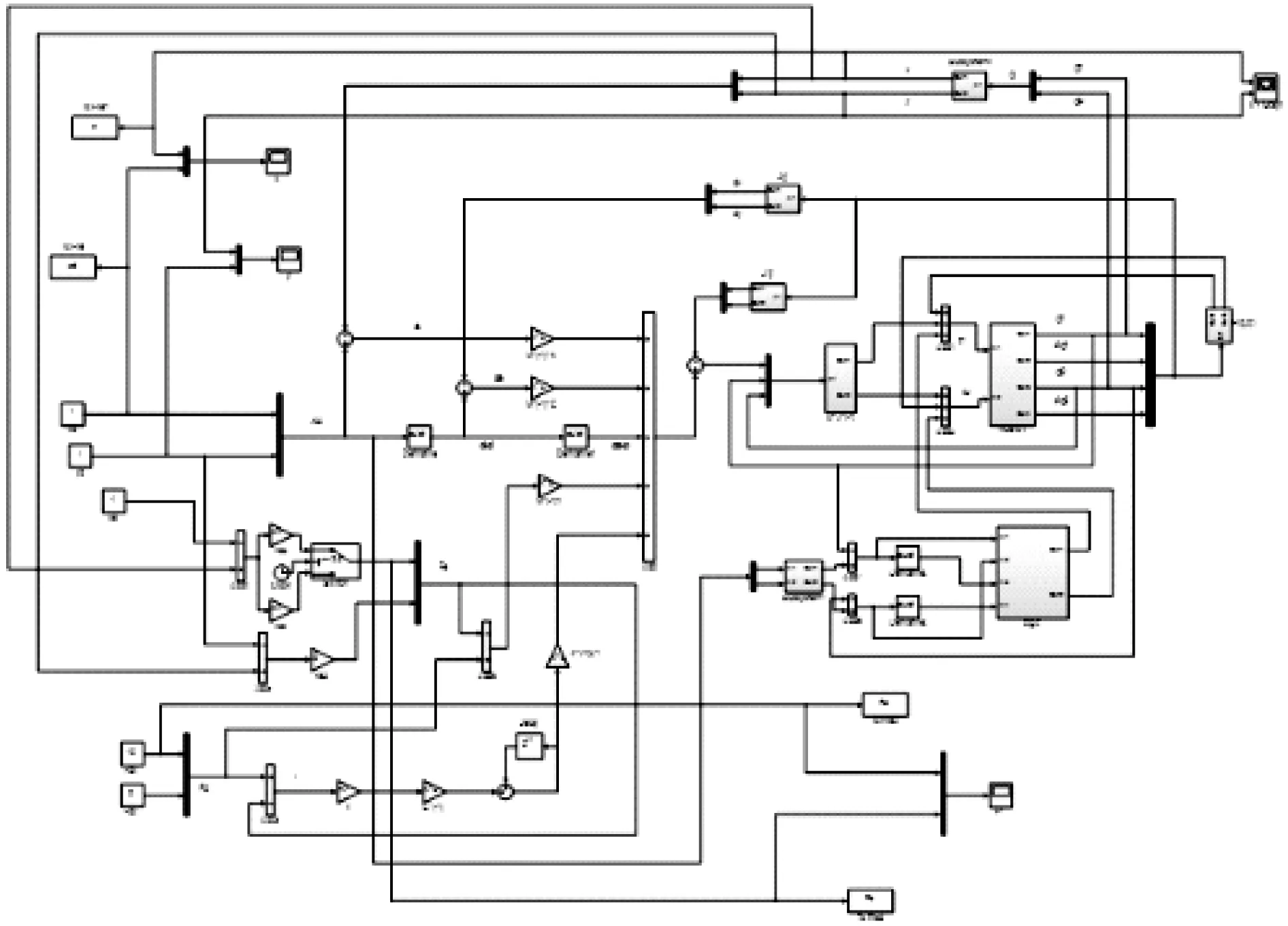
图5 MATLAB仿真实验平台
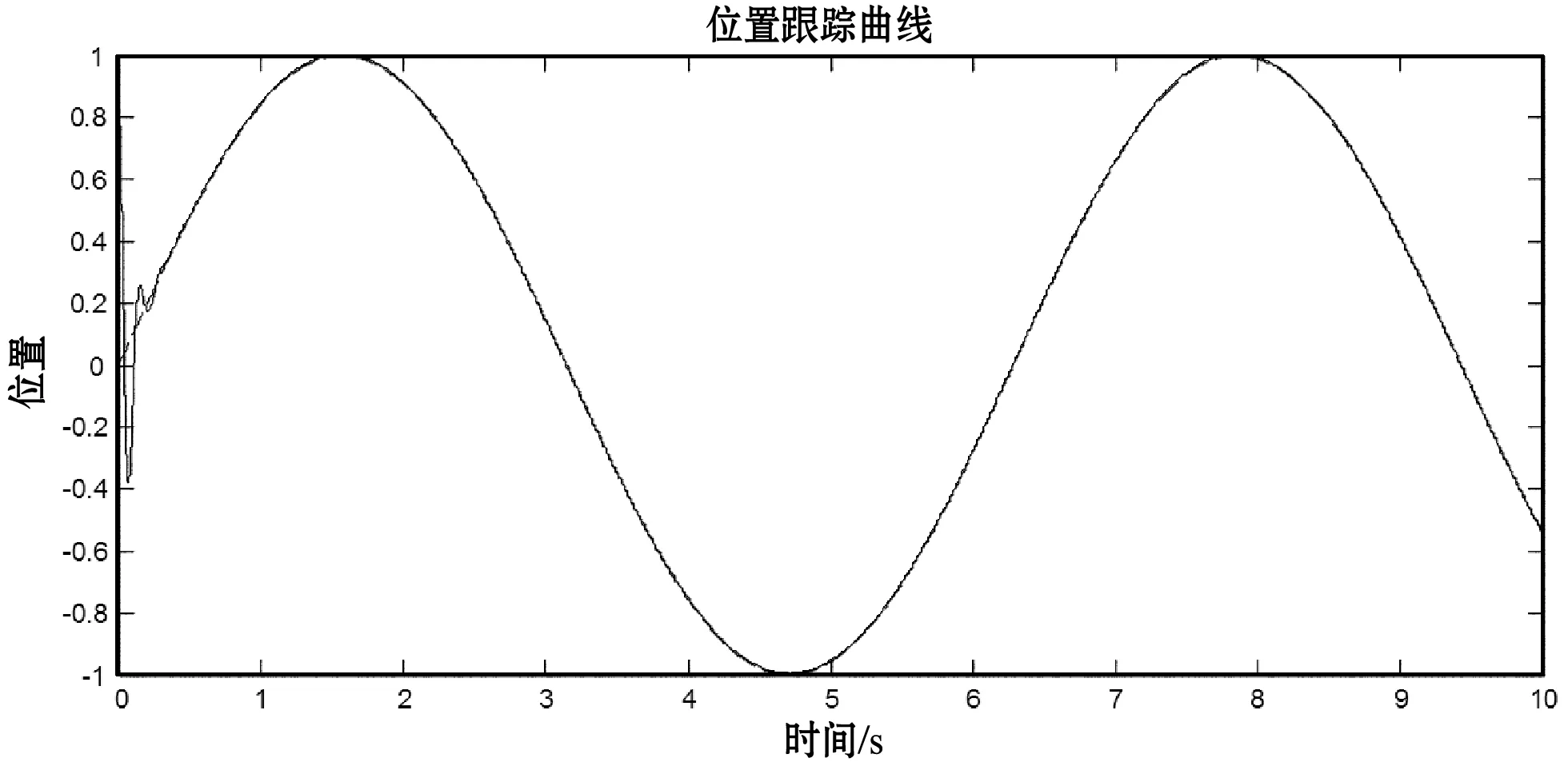
图6 x轴位置跟踪曲线
考虑自动贴标装置与行李接触为恒压力接触,故取输入的期望力为:x方向上10 N,y方向上0 N,定义行李表面为平整的平面,对其进行仿真验证验证,结果如图7-图8所示。其中,虚线为期望的力和位置信号,由仿真结果可知,在环境参数未知的情况下,经过充分的迭代学习后,该算法输出的力和位置信号误差在期望的误差范围内,较好地满足位置和力跟踪的要求。

图7 力跟踪曲线

图8 位置跟踪曲线
由于旅客行李的多样性,将其抽象为弹性体后,表现为其刚度系数的不同。由于行李的刚度系数无法提前获知,假定初始的环境刚度系数为ke=2 000,在t=2.5 s时,环境刚度发生突变,ke=500,分别验证其在阻抗控制与本文所提出的自适应控制算法下对期望力的跟踪情况,验证结果如图9-图10所示。

图9 阻抗控制变刚度力跟踪曲线

图10 自适应阻抗控制变刚度力跟踪曲线
图9为在变刚度环境下阻抗控制对力信号的跟踪效果,图10为自适应阻抗控制对力的跟踪效果。仿真结果表明:单纯的阻抗控制无法满足变刚度情况下对期望力的跟踪,而基于神经网络的自适应阻抗控制在经过自适应调整后可以很好地跟踪上期望力。
实验样机如图11所示,供标装置将标签送至指定贴标区域后,柔性贴标装置将标签压贴于行李表面,由压力传感器检测贴标装置与行李之间的初始接触力,反馈于控制系统,利用基于神经网络的自适应阻抗控制算法控制机械臂的升降,使贴标压力始终维持在允许范围内。实际接触力的控制效果受机构间的摩擦力、压力传感器的测量误差等因素的影响,与仿真结果存在一定差距。经验证,该方法可以避免损坏行李并能够满足良好的贴标效果。
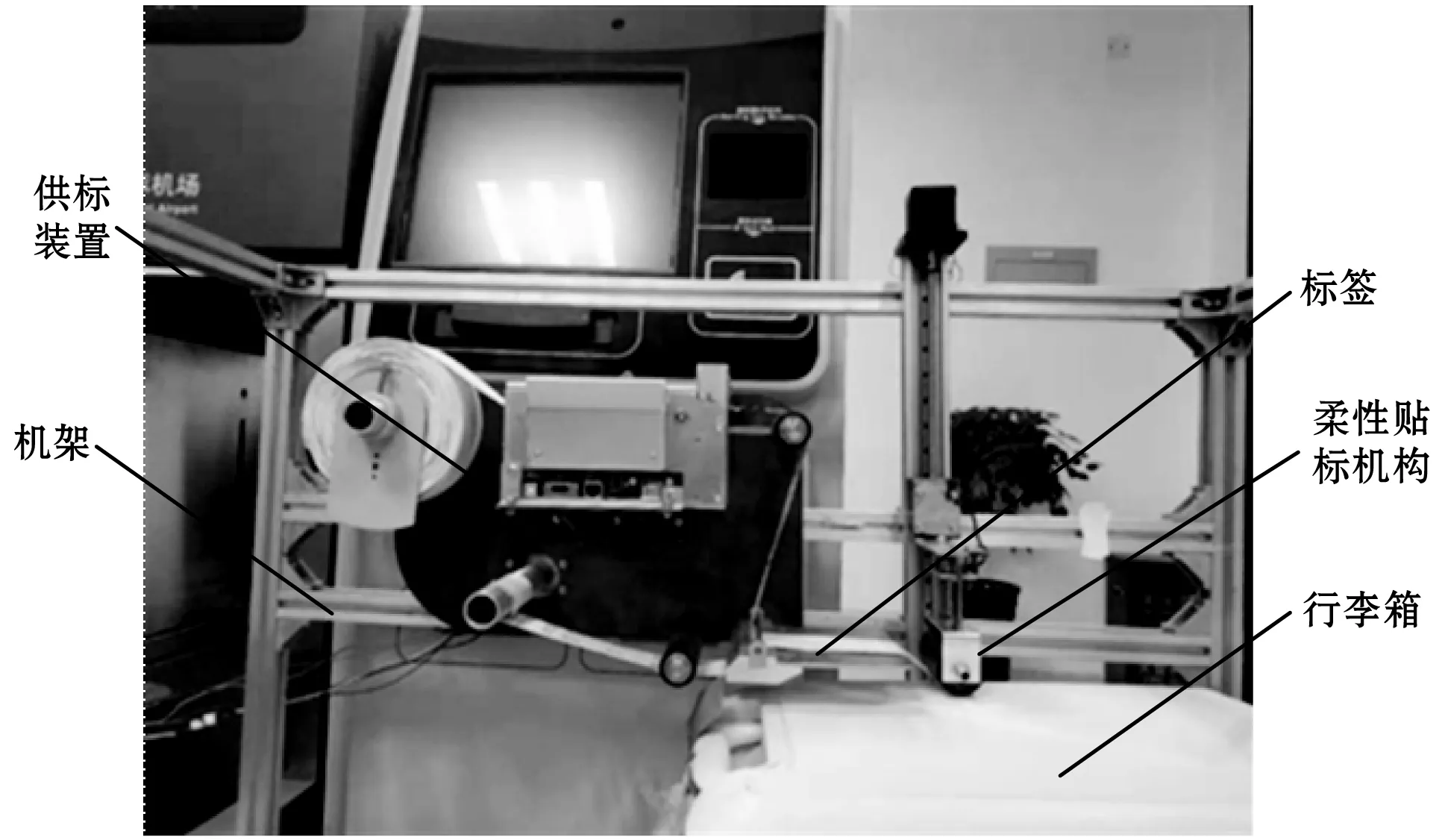
图11 实验样机
4 结 语
本文针对机器人贴标作业时接触力的控制问题,在环境参数未知、机器人动力学模型不精确的情况下,研究了一种主被动柔顺控制贴标方法。首先设计了一种被动柔顺贴标机构,利用机构自身的柔性吸收由于外力干扰等因素带来的惯性力,确保行李的安全;其次提出了一种基于RBF神经网络的自适应阻抗控制算法,该算法通过在线实时更新阻抗控制参数,实现在环境参数未知的情况下对期望力跟踪的目的。在MATLAB中对本文所提算法与传统阻抗控制算法进行对比实验,结果表明,该方案在环境参数未知的工况下达到了较理想的控制效果。
