一种基于BP神经网络的四轴飞行器飞控优化方法
2019-08-13龚赛君
龚赛君
摘 要:针对四轴飞行器串级PID控制器参数整定繁琐的问题,提出在串级PID控制器中加入BP神经网络的优化方法。利用Simulimk对加入BP神经网络前后的飞控系统进行仿真。结果表明,加入神经网络后飞控系统在超调量、响应时间和稳定性等方面都有了明显的提高。
关键词:串级PID BP神经网络 Simulink
中图分类号:V279 文献标识码:A 文章编号:1672-3791(2019)05(a)-0011-02
Abstract: Aiming at the tedious problem of parameter tuning of PID controller, a method of adding BP neural network to cascade PID controller is proposed. Simulimk module is used to simulate the flight control system before and after adding BP neural network. The results show that the flight control system with neural network has improved obviously in overshoot, response time and stability.
Key Words: Cascade PID; BP Neural Network; Simulink
在四轴飞行器飞控系统的设计中,通常采用PID控制器来解算控制信号。然而,早期的单级PID控制会导致误差大、反应不灵敏等问题,采用改进的串级PID(采用角速度控制为内环,角度控制为外环)控制虽然能提升控制系统的稳定性与抗噪性,但又带来了参数整定繁琐的问题。鉴于此,该文提出利用BP神经网络训练飞控系统,使各项参数达到最佳以提高四轴飞行器整体性能的方法。
1 四轴飞行器控制系统设计
四轴飞行器在运动过程中,姿态会随时间不停变化,因此需要随时调整电机的输出才能稳定飞行器的飞行,也就是俗称的自稳。在遥控器控制或者自主飞行的过程中也需要改变4个电机的转速,使其达到目标姿态与速度。串级PID控制器是经过改良的PID控制器,即能基本准确地实现目标姿态与实际姿态之间的误差解算并为电机输出控制量。串级PID中有两个PID控制器,内环为角速度,外环为角度,由内环控制器的输出去操纵控制阀,从而对外环被控量具有更好的控制效果。
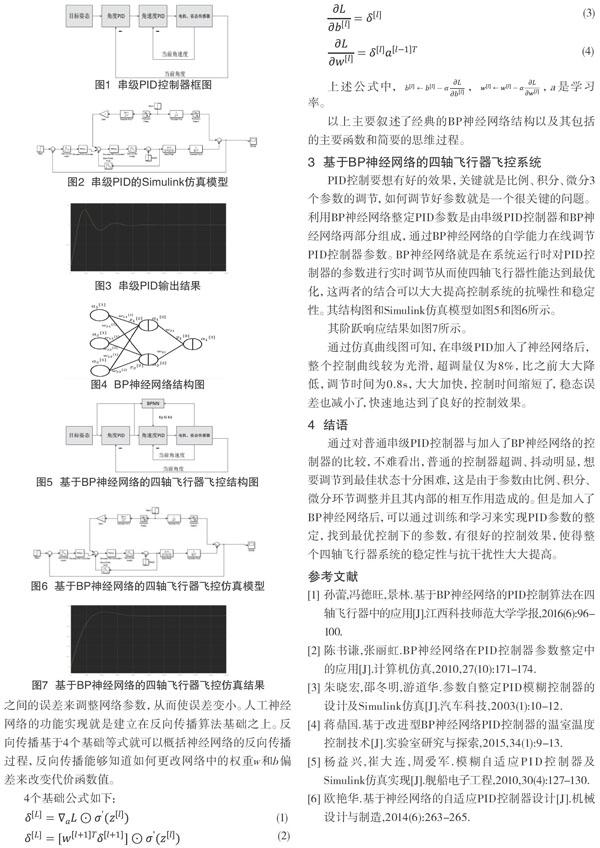
串级PID控制器框图及其Simulink仿真模型分别如图1和图2所示。
其阶跃响应结果如图3所示。
通过仿真曲线图可知,整个控制曲线超调量为40%,比较大,调节时间为1s,有抖动,结果不是很理想。
2 BP神经网络
BP神经网络是一种按照误差反向传播算法训练的多层前馈神经网络,具有任意复杂的模式分类能力和优良的多维函数映射能力,解决了简单感知器不能解决的疑惑和一些其他问题。从结构上讲,BP网络具有输入层、隐藏层和输出层;从本质上讲,BP算法就是以网络误差平方为目标函数、采用梯度下降法来计算目标函数的最小值。
2.1 BP神经网络结构
BP神经网络通常分为3层,第一层为输入层,第二层为隐含层,第三层为输出层,其结构如图4所示。
在图4中,Wljk表示从络第(l-1)th中的第Kth個神经元指向第lth中的第个jth神经元的连接权重。使用bi[l]来表示第lth层中第jth个神经元的偏差,zj[l]来表示第lth层中第jth神经元的线性结果,用aj[l]来表示第lth层中第jth神经元的激活。
2.2 损失函数与代价函数
损失函数主要指的是对于单个样本的损失或者误差;代价函数表示多样本同时输入模型的总体误差,即每个样本误差求和取平均值。
2.3 反向传播
反向传播的基本思想就是通过计算输入层与期望层之间的误差来调整网络参数,从而使误差变小。人工神经网络的功能实现就是建立在反向传播算法基础之上。反向传播基于4个基础等式就可以概括神经网络的反向传播过程,反向传播能够知道如何更改网络中的权重w和b偏差来改变代价函数值。
以上主要叙述了经典的BP神经网络结构以及其包括的主要函数和简要的思维过程。
3 基于BP神经网络的四轴飞行器飞控系统
PID控制要想有好的效果,关键就是比例、积分、微分3个参数的调节,如何调节好参数就是一个很关键的问题。利用BP神经网络整定PID参数是由串级PID控制器和BP神经网络两部分组成,通过BP神经网络的自学能力在线调节PID控制器参数。BP神经网络就是在系统运行时对PID控制器的参数进行实时调节从而使四轴飞行器性能达到最优化,这两者的结合可以大大提高控制系统的抗噪性和稳定性。其结构图和Simulink仿真模型如图5和图6所示。
其阶跃响应结果如图7所示。
通过仿真曲线图可知,在串级PID加入了神经网络后,整个控制曲线较为光滑,超调量仅为8%,比之前大大降低,调节时间为0.8s,大大加快,控制时间缩短了,稳态误差也减小了,快速地达到了良好的控制效果。
4 结语
通过对普通串级PID控制器与加入了BP神经网络的控制器的比较,不难看出,普通的控制器超调、抖动明显,想要调节到最佳状态十分困难,这是由于参数由比例、积分、微分环节调整并且其内部的相互作用造成的。但是加入了BP神经网络后,可以通过训练和学习来实现PID参数的整定,找到最优控制下的参数,有很好的控制效果,使得整个四轴飞行器系统的稳定性与抗干扰性大大提高。
参考文献
[1] 孙蕾,冯德旺,景林.基于BP神经网络的PID控制算法在四轴飞行器中的应用[J].江西科技师范大学学报,2016(6):96-100.
[2] 陈书谦,张丽虹.BP神经网络在PID控制器参数整定中的应用[J].计算机仿真,2010,27(10):171-174.
[3] 朱晓宏,邵冬明,游道华.参数自整定PID模糊控制器的设计及Simulink仿真[J].汽车科技,2003(1):10-12.
[4] 蒋鼎国.基于改进型BP神经网络PID控制器的温室温度控制技术[J].实验室研究与探索,2015,34(1):9-13.
[5] 杨益兴,崔大连,周爱军.模糊自适应PID控制器及Simulink仿真实现[J].舰船电子工程,2010,30(4):127-130.
[6] 欧艳华.基于神经网络的自适应PID控制器设计[J].机械设计与制造,2014(6):263-265.
