基于进化神经网络重型汽车ABS故障诊断研究
2019-08-13谢敬友
谢敬友
(德州职业技术学院,山东德州 253000)
1 重型汽车ABS制动系统分析
ABS(Antilock Brake System,防抱死制动系统)是汽车制动系统上的主动安全装置,其对重型汽车的安全行驶有较大影响。重型汽车的ABS装置通常包括车轮速度传感器、电子控制单元(Electronic Control Unit,ECU) 和制动压力调节器(Hydraulic Control Unit,HCU)(图 1)。
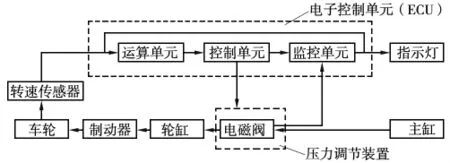
图1 ABS制动系统
(1)轮速传感器。车轮速度传感器是感知车轮转速并将信号传递给单子控制单元。
(2)电子控制单元。电子控制单元计算每个车轮速度,对操作机构发出指令。
(3)制动压力调节器。制动压力调节装置通过电子控制单元的指令开启和关闭电磁阀改变制动系统的压力,使车轮保持最佳制动状态。
2 进化神经网络算法
2.1 算法理论分析
BP(Back Propagation,神经网络)具有很高的非线性表达能力,可以建立从n维特征空间到m维空间的映射关系n和m分别是是模型的输入和输出个数,BP网络结构中的输入和输出由要解决的问题确定。通过遗传算法进行全局优化可以获得良好的学习效果并简化算法的使用。它主要由2个内部和外部两级优化过程组成:①外部进化循环执行BP网络结构参数的演化;②内层进化循环执行初始权重的演化。
BP神经网络算法循环是在遗传算法优化的网络结构和初始权重之后执行的,构成了整个学习过程。
2.2 算法实现步骤
2.2.1 BP神经网络结构参数的遗传算法演化
在BP网络结构参数优化循环中,遗传算法用于搜索BP网络结构参数。
2.2.2 BP神经网络初始权重遗传算法的优化计算
对于在遗传算法的演化周期中生成的每个BP神经网络结构参数组,可以根据BP网络的连接机制来计算诸如权重系数的数量之类的信息。适应值计算公式:

式中 Oi,j——预测结果
n——样本个数
m——输出个数
2.2.3 优化后初始权值的训练
遗传进化算法具有出色的全局搜索能力,但在局部精度方面无法加深。因此,对于上述2个步骤中生成的每个模型结构参数及其优化的初始权重,有必要根据通用BP算法进行学习训练,并进行局部优化。全局和本地两层优化网络权重和相应结果参数的组合,构成了在当前网络结构配置下可以实现的最佳BP网络模型。
3 重型汽车ABS故障诊断模型
根据ABS的工作原理和信号采集特性,下面将采用x1纵向速度,x2横向速度x3左前轮速度,x4右前轮转速,x5左后轮转速,x6右后轮转速作为BP神经网络的输入,将不同条件下的相应故障类型的预期值作为输出。输出类型为:y1无故障,y2左前调节器故障,y3右前调节器故障,y4左后调节器故障,y5右后调节器故障。
3.1 学习样本收集
通过上述分析,有6个故障特征因子和5个故障类型,分别对应BP神经网络的6个输入层节点和5个输出层节点。每种故障类型包含10组样本,总共50组样本数据。ABS调节器训练及检验样本的选取分别取 0.3 s、0.4 s、0.5 s、0.6 s、1.5 s、1.8 s、3.2 s、3.8 s、4.2 s、4.5 s时的速度值作为特征信号,5 种故障类型各10组样本(表1)。其中,以 0.6 s时的数据信息为检测样本,其他数据信息作为训练样本。

表1 0.6 s时检测样本数据m/s
根据神经网络算法规则对目标输出值进行二进制设置,对编号1无故障编码为(10000);对编号2左前故障编码为(01000);对编号3右前故障编码为(00100);对编号4左后故障编码为(00010);对编号5右后故障编码为(00001)。样本数据的大小变化较大,为更高效进行算法计算,需要对数据进行归一化处理,使得样本数据输入和输出值在(-1,1)范围内[6]。
3.2 ABS故障诊断模型建立
在模型学习训练过程中,模型学习误差设置为0.000 1,模型学习训练由Matlab软件完成。遗传算法参数设置为:种群30,最大迭代次数为110,交叉概率为0.3,变异概率为0.1;模型为3层网络,输入参数为6。输出参数为5(图2),网络训练过程中神经网络结构和初始权值进化代数为8时趋于稳定(图3),网络训练次数为5000时,模型输出误差趋于稳定。

图2 最佳适应值变化
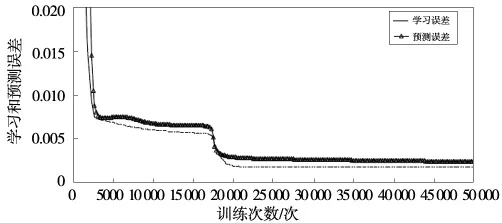
图3 模型预测误差变化
3.3 故障诊断模型检验
将1.5 s时的调节器检测样本输入训练好的网络,经遗传神经网络诊断系统得出的ABS调节器故障诊断结果如表2所示。
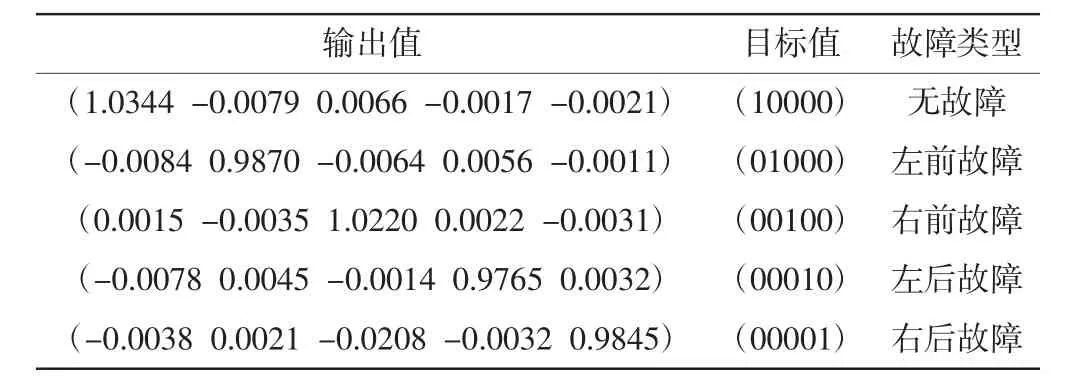
表2 检测样本输出数据
通过表2可知,故障诊断模型有正确的输出值,故障诊断模型有一定的实用价值。
4 结论
本项目通过对重型汽车ABS制动系统分析,确定了ABS制动系统结构。对进化神经网络算法进行了分析,确定了算法实现的基本流程和方法。对学习样本数据进行了收集以及样本数据的处理,得到50组样本数据,其中以0.6 s条件下的5组数据为检测样本。运用Matlap软件进行了数据样本的学习训练,得到了神经网络结构和初始权值进化代数为8,网络训练次数为5000时的网络模型。通过检测样本对故障诊断模型进行了检验,通过检验数据,证明了该故障诊断模型有较高精度的输出值。
