修井井口机械自动化技术应用现状及前景展望
2019-08-13高望祺
高望祺
(大庆油田有限责任公司井下作业分公司,黑龙江大庆 163000)
0 引言
修井是油田建设与生产过程中极具技术复杂性、工序繁琐性和实施危险性的系统性工作,随着国内油田勘探开发的不断深入、开发时间的不断延长,修井行业作为措施增油的一种工艺方式,在油田开发的中后期显得尤为重要,任务量逐年增长。为了降低修井工作的劳动强度,提升井口作业的高效性、安全性和稳定性,需要不断提升井口自动化设备及其发展系统的应用水平。通过自动起下钻、推起单根、自动上卸扣、自动摆放立柱等工作的机械自动化实施,将井下作业井口操作的流程程序化,实现操作简单化、效益化和控制精准化的有机统一。
1 实现修井井口机械自动化的必要性和价值
修井作业井口的机械自动化发展是基于传统井口作业的基本流程,利用自动化技术和智能控制技术,实现起下油管、上卸扣、管柱处理等作业自动化设备与系统的研发、安装、调试、验收与体系化应用,从而全面实现了井口操作无人化,达到提升井口作业效率及安全性的目的。总体来说,实施修井井口机械自动化的必要性和价值主要体现在以下2个方面。
(1)在传统的修井井口作业中,人工操纵下钻等管柱处理作业的油气开采深度较浅,而且在实际开采过程中,常规的大型钻机难以进入,在设备迁移、钻采成本的控制上存在诸多难点,如果操作不当,甚至会出现油气资源出砂、出水等不良现象,稳产性和效率性均难以满足需求。因此通过引入下油管、下卸扣等自动化装置,将井口作业的控制操作全部由一个智能化远程操控平台一体实现,极大拓展了作业的实施深度,减少了地面作业及设备的施工面积,提升了作业的灵活性和稳定性,并降低了人为操作的误差,带来了作业成本和作业质量的有效管控。
(2)传统钻机人工装载钻杆等操作费时、费力、效率低下且存在较大危险性,哪个环节出现纰漏都有可能会造成严重的人身伤害事故和财产损失。尤其是在山区、丘陵等起伏地貌的复杂地理环境中,作业效率、安全性和质量都将承受严峻的考验[1]。而通过自动化机械设备及其系统的应用,将极大集成井口作业的工序,避免人工的参与与操作,提升作业安全性和效率性的同时,结合实际的作业需求,通过融入自动上卸扣、动力猫道等自动化辅助技术,能大幅度提升井口作业的环境适应性和操作高效性,带来修井作业经济效益、一线员工社会价值的同步提高。
通过修井井口自动化系统的实施,可以通过应用集液平台、油管油污防喷筒去实现对井口出液的全部收集[2]。进而改变了传统施工方式下挖循环坑、土堆围堰等方法,真正实现污油污水不落地的绿色施工开采实施目标。
2 修井井口自动化设备应用的具体内容和技术关键点
修井井口自动化设备及其系统应用的关键技术,就是将井下作业井口操作的流程进行程序化,用触控屏、控制手柄指挥“机械手”执行井口作业的每步动作,起下管柱、丝扣松卸、立柱摆放完全由“机械手”自动化完成。其自动化工作内容包括自动起下钻、自动上卸扣、自动摆放立柱等,可由一整套的管柱处理系统配合井口的自动化工具、操作传感系统及远程数字化控制平台一体集成实现,进而达到钻井速度及质量的全面化提升。
2.1 自动上卸扣控制系统
传统的修井作业需要5~6个人才能完成排管、推管卡持管杆以及上卸扣等工作,而该过程不仅修井作业的关键环节,而且劳动强度极大、人工操作效率低下,存在有诸多的安全隐患。鉴于人工上卸扣工艺技术的缺陷,可采取自动化的管杆上卸扣装置,达到作业操作的连贯性、高效性和质量稳定性。
自动化上卸扣装置基础为一个安装有可灵活滑动的移运小车机座,该移运小车的侧壁安装有能够远程控制小车的驱动(设置有1个驱动转轴,驱动转轴上安装的齿轮与齿条啮合进行传送驱动)。移运小车之上还安装有1个能后自动升降机械手臂(升降臂由升降基座与小车之间的升降驱动操控,其升降为交叉升降结构),同一升降机座上安装有1个能够左右摆动的机架,1个主钳总成装置通主钳前后移动驱动安装在左右摆动机架上,同时在机架上安装有1个管杆扶正装置(通过销轴安装在所述左右摆动机架上)和1个防喷装置[3]。
在运行中,进行远程操控小车驱动装置,使移运小车自动向井口中心移动,升降座在升降臂和升降驱动的共同作用下升至油管接箍位置,主钳总成开始进行卸扣,并自动完成卸扣后管杆的扶正操作,上卸扣作业完成之后,移运小车即可自动复位。整个过程标准化程度和质量稳定性高,而且大大提升了作业效率,减小了人工操作的危险。
2.2 自动下油管控制系统
修井作业的自动化起下油管装置一般由自锁式油管吊卡、井口锁紧装置和液压钳液压控制系统3个部分构成。其中,自锁式油管吊卡安装于吊环内部,井口锁紧装置安装与井口之上(此时卡块不予安装锁紧,待起出油管头后再进行安装),其液压油管钳系统则由机械手臂、液压油管钳、液动吊卡、气动卡盘等构成(图1)。该自动化装置全面避免了修井井口人工抬吊卡、挂吊卡、穿销子等繁重的人力操作,并通过自锁式的活动卡板消除传统的安全隐患。另外,井口的锁紧装置还能实现单吊卡起下油管的灵活形式,液控自动化操作代替了人工推动操作,精准性、安全性和效率性得到了极大提升。
(1)起油管。当需要起出井内第一根油管时,自锁式油管吊卡会对准油管接箍以下油管体,吊卡两侧的活动卡板会在弹簧的弹力下自动将油管挤住.接着打开气动卡盘,松开管柱并上提,当第二根油管接箍起出井口后,自动顶开4个装在井口锁紧装置上的卡块,接箍通过后,4个卡块自动下行回位。当油管接箍与液压油管钳上的背钳头对齐时,停止起管。这些操作都可在控制室内通过控制液压钳的油缸(前进档、反转档、后退档)进行重复一体的操作,直至起出井内的全部油管。
(2)下油管。在下油管操作中,自锁式的油管吊卡会自动挤紧油管并吊起,实现油管与井口有效对正,此时操作远程的电控开关,4个卡块就会朝上行走并完全打开油管的通道,这时就可以向井内下入第一根油管。待油管的接箍正面对其液压钳的背钳时,操作远程开关将4个卡自动复位,下放油管的便会被紧锁装置进行自动的锁住[4]。吊卡取下后再将油管桥上的第二油管吊起并与第一根油管实现标准化的对接,液压钳抓住油管,并通过远程操作使油管上扣,一次实现反复下油管操作,直至下入全部油管。

图1 起下油管装置的液压操纵系统
2.3 管柱自动化输送系统
当下应用最为普遍的管柱自动化系统是利用带液压排管架的动力猫道系统设备,其由液压站、电控柜、链传动机构、滑车机构、本体运行机构、本体液压缸、机架、举升机构、V形槽、上卸钻具机构及钻具存放板等一体构成,能够实现钻杆、钻铤、套管等管柱在地面台架与钻台面之间往返输送(图2)。
动力猫道坡道可折叠放置在底座上,实现动力猫道主体的一体化运输,钻杆架将钻杆存放并自动运输到底座上,通过底座中间的沟槽和沟槽内的滑板(滑板带有钢丝绳和滑轮设备)将钻杆运送到倾斜的活动坡道上,活动坡道位于倾斜坡道上,然后通过液压缸将载有钻杆的活动坡道举升到与钻台面近似平行的位置。此时钻台设备来抓取钻杆,完成一次钻杆的运送[5]。
动力猫道的输送架在回位后能与底座自动平齐,从而大大提升了随钻、测井仪器安装的便易性。如果出现输送架在高位失去动力的情况,液压绞车会实现自动刹车,并通过蓄能器达到输送架的合理下放,直至将输送架置于低位。该自动化输送装置可以通过无线遥控操作实现管柱自动上、下钻台,配合缓冲机械手以及PLC程序的优化,能够灵活控制比例阀开度,进而实现了输送架的平稳起升、下落和中间过程的快速灵活动作。通过链条驱动输送小车推送管柱,标准自动化工作平稳而有效,因而大大减轻了劳动强度节约运输成本,提高工作效率。
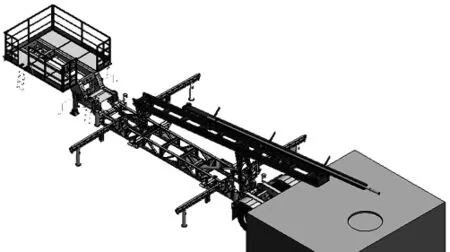
图2 液压动力猫道
3 修井井口机械自动化技术的应用前景
(1)在液压钻机的全自动技术优化提升中,为了实现对钻机的动力供给、整体构造、工具集成等方面智能化提升,起井口作业逐步采取了全液压动力驱动,并逐步引入柴油发动机与分动箱传动装置,进而可通过负载敏感系统进行动力的输出与控制,在降低液压马达负载的情况下,将动力头运行速度进行了全面的适应性优化。在钻机的自动化集成上也有了新的发展趋势,钻机开始集液压伸缩式起升油缸、立式管具自动搬运存储系统、可横向移动的液压顶驱系统、井口自动化工具等于一体,不仅大大提升了作业自动化机构的紧凑性和工作衔接紧密性,还极大优化了接单根、起钻和下钻的速度,扩大了井口和井下作业的灵活性和稳定性。
(2)为了实现对修井井口作业及其自动化设备运行情况的实时监控,开始逐步引入无线仪表监控井口的数据,并将其同步传送至远程控制处理平台。通过对修井及井下作业信息和数据的全方位把握,结合生产自动化控制模型的全面修正,不仅可以基于操作实际对平台的自动化水平和远程操作水平的进行适应性的优化,还可以管控油气田生产全生命周期的有效成本,进而全面提升油气田开采经济效益。
4 结语
修井井口作业是油气田工程的关键组成部分,为了提升修井井口各个作业环节的高效性、质量性、安全性和经济性,需要结合自动化技术的发展实际,采用紧密度和工作实用性更加的强的自动化设备及系统,实现井口操作无人化,信息采集实时化以及数据分析利用全面化的发展目标,进而为我国油气能源开采效能的现代化提升奠定坚实的基础。
