头部旋转重定向的交互效率和眩晕感研究
2019-08-08马明明孙东标王党校
马明明,业 全,胡 杨,薄 正,孙东标,王党校
头部旋转重定向的交互效率和眩晕感研究
马明明1,2,业 全2,3,胡 杨2,4,薄 正1,2,孙东标2,5,王党校6
(1. 中国科学院遥感与数字地球研究所,北京 100101; 2. 中国科学院大学,北京 100049;3. 中国科学院空间应用工程与技术中心太空应用重点实验室,北京 100094;4. 中国科学院地理科学与资源研究所,北京 100101;5. 中国科学院生物物理研究所,北京 100101;6. 北京航空航天大学虚拟现实技术与系统国家重点实验室,北京 100083)
如何通过重定向方法实现360°观察,同时保证用户的较高的舒适度和较低的眩晕感,是虚拟现实研究的一个重要话题。对放大与引导头部旋转算法的交互效率和眩晕感进行定量研究,使用户坐姿下,通过头戴显示器(Pico neo基础版)旋转一个舒适的角度以观看360°虚拟范围,并在虚拟旅行中引导头部旋转使头部回到自然前向。设计了2种放大头部旋转算法,并与2种现有方式进行对比实验,提出了一种对于引导头部旋转中感兴趣区的自动检测算法,动态计算虚拟对象的角度阈值区实现感兴趣区的选取,在此基础上设计了一种基于正弦的引导旋转算法。通过用户实验,得到各个算法的实验比对结果,实现在较为复杂的虚拟环境中引导头部旋转重定向。
放大头部旋转;引导头部旋转;角度阈值区;感兴趣区
在传统的虚拟现实系统中,头部跟踪的头戴式显示器允许用户通过身体的360°旋转来控制虚拟世界观看角度[1]。然而在某些特殊情况下,如当用户坐在固定的沙发上或椅子上时,传统的360°身体旋转会带给用户不完整、不舒服的虚拟世界体验。为了解决此类特殊的虚拟世界浏览方式所带来的不便,相关研究者提出了放大头部旋转技术[2],以便通过舒适的头部旋转即可实现360°虚拟世界范围的浏览。此外,为了避免用户在虚拟场景中需观看侧方物体从而使颈部长时间处于不舒服的位置,相关研究者也提出了引导头部旋转技术[3],在虚拟世界浏览期间使用重定向技术[4]来逐渐引导用户的头部旋转重新调整到正前方位置。
SARGUNAM等[3]研究了放大头部旋转技术和引导头部旋转技术,与传统的头部跟踪进行对比实验,显示放大和引导头部旋转可以解决在上述场景下的用户体验差的问题。RAGAN等[5]研究了放大头部旋转技术对3D搜索、空间定位和网络病态的影响,通过改变放大头部旋转的增益因子,并在头戴式显示器和环绕屏幕2种虚拟现实显示方式中进行了评估实验,证明了使用放大头部旋转技术在浏览360°范围虚拟世界的研究价值。SCHMITZ等[6]利用了重定向技术开发有效的空间压缩方法,将浸入式中断作为重定向技术的基准,实现了在小型物理环境中可以畅行无阻地穿行大型虚拟空间,表明了引导重定向技术在虚拟世界浏览的重要性。但鲜有头部引导重定向应用在复杂场景中的研究。
本文主要研究在复杂场景中的放大头部旋转和引导头部旋转结合应用。重点研究放大头部旋中眩晕感的减弱以及引导头部旋转在复杂场景中感兴趣区动态选择的研究,感兴趣区作为引导头部旋转重定向的目标对象。提出2种改进的放大旋转因子,与之前的2种经典增益因子做对比实验,得到最有增益因子,应用于后续引导头部旋转中。
为了提高复杂场景的适应性和用户体验的舒适性,本文设计了一种感兴趣区的动态选择算法,根据不同虚拟对象计算特有的角度阈值区,作为用户感兴趣区的选择依据。选定感兴趣区后,引导头部旋转重定向过程中使用了基于正弦的旋转曲线,分别在多个复杂场景中进行了用户实验。
1 研究现状
1.1 放大头部旋转
文献[3]采用动态放大旋转因子=2–cos(),其中为头部物理旋转角度,将乘以增益因子作为虚拟世界中的旋转角度。其允许用户通过180°物理旋转便可实现虚拟世界中360°的旋转。当用户面向接近前向的方向时=1,无放大效果,增益因子随着用户物理旋转角度增大而增大,当用户物理旋转达到90°时,增益因子达到最大值=2。
1.2 引导头部旋转
引导式头部旋转在虚拟旅行中增加了重新对齐。在文献[3]的研究中,头部引导实验环境较为简单,自动选取AOI (areas of interest)方向作为重定向目标方向进行引导重定向。在行走过程中引导头部旋转重定向中做了简化实验,设置AOI集合,然后在行走过程中计算当前旋转方向与AOI集合中对象的夹角,选择与当前旋转方向夹角最小的AOI集合中的对象作为兴趣区。之后,使用用户当前位置与所选目的地之间的归一化距离输入到缓动函数以计算旋转调整值。将内插值标准化并乘以最大旋转调整值作为重新对齐的旋转角速度,在虚拟移动中逐渐引导用户头部旋转并最终处于自然前向。
从用户移动开始,通过缓动方程从0逐渐增大旋转调整增益因子至最大值,避免从静止开始突然的转动。随着用户逐渐地靠近虚拟对象过程中,逐渐减小旋转调整因子至0,使得靠近对象时旋转速度较小。
根据归一化距离使用CasMull ROM样条作为缓动方程,计算归一化距离中0~1平缓的内插值,即
=0.5×(+×+×2+×3) (1)
其中,为用户起始点到AOI距离的归一化距离;=2×1;=2–0;=2×0–5×1+4×2–3;=–0+ 3×2+3;0,1,2,3是通过样条计算得来的数据,分别为–1,0,1,0。
在起点到中点区间,的值从0增加到1,曲线平稳上升。一旦穿过中点,的值线性减小(从1到0),曲线平缓下降。
为了避免旋转速度太快,限制最大转动速度为10.8 °/s,如图1所示。

图1 式(1)中的旋转调节因子曲线
2 本文方法
本文对放大与引导头部旋转在复杂场景中的应用进行了进一步研究,重点关注使用过程中眩晕感舒适度表现。在此基础上,研究在复杂场景中的引导头部旋转对感兴趣区的选择,提出动态角度阈值区的概念,以视线向量落在每个对象特有的角度阈值区作为感兴趣区的选择依据,同时研究提出了基于正弦的引导旋转重定向过程曲线。
2.1 放大头部旋转因子研究
文献[3]提出的旋转增益因子在物理旋转角较大时增长较快,也容易产生更强的眩晕感,如图2(a)所示,为头部物理旋转。
测试中发现,旋转过程中眩晕感主要来源于:
(1) 增益因子较大时,虚拟旋转速度比物理旋转角差异太大,容易造成眩晕;
(2) 放大头部旋转中放大因子变化较大,用户始终无法适应,容易产生眩晕。
基于上述2个约束,较好的旋转增益因子应满足:
(1) 增益因子不宜过大;
(2) 在旋转过程中,增益因子变化不宜过大。
参考上述2个原则,本文选取了4种增益因子进行对比实验,见表1,其中为物理旋转角度,为增益因子。
第1,2种增益因子如图2(a)和图2(b)所示;第3种增益因子是基于高斯函数,通过调节方差(经测试推荐方差为0.55)得到的增益因子,如图2(c)所示;第4种增益因子为恒定增益因子。对4种增益因子进行了对比实验,最终选取眩晕感表现最好的放大头部旋转因子并将其应用到引导头部旋转重定向中。
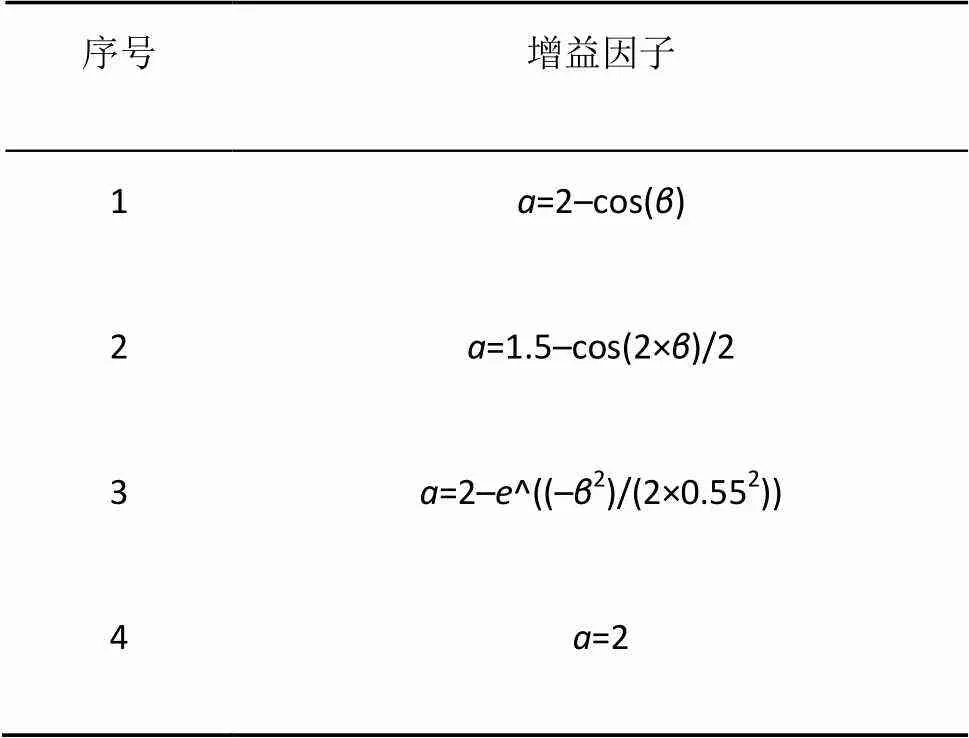
表1 4种放大头部旋转方

(a)=2–cos()
(b) a=1.5–cos(2×β)/2
(c) a=2–e^((–β2)/(2×0.552)) 图2 旋转增益因子曲线
2.2 引导旋转角速度
2.1节介绍了头部旋转放大技术,缓解了用户在使用过程中由于大的旋转角度造成的颈部不适,结合引导头部旋转重定向使得用户可以在虚拟旅行(通过手柄控制行走)中引导头部逐渐旋转到自然前向,减缓长期位于旋转状态的不适,使得用户以一个舒适的状态进行虚拟旅行。本文重点研究重定向目标区域即感兴趣区的选取算法。为每个对象计算各自特有的角度阈值区,当视线落在某个对象的角度阈值区则认为选定该对象作为感兴趣区。
研究发现,引导头部旋转重定向过程中,用户产生眩晕感主要源于:
(1) 从引导头部旋转重定向开始时,相机旋转太大;
(2) 当重定向使用时,用户与对象的距离较近但旋转速率不变而产生的眩晕感增强。
因此,重定向引导旋转角速度曲线需满足:
(1) 从用户移动开始,通过缓动方程从0逐渐增大旋转调整因子至最大值,避免从静止开始突然的转动;
(2) 在用户逐渐地靠近虚拟对象的过程中,逐渐减小旋转调整因子至0,使得靠近对象时旋转速度较小。
因此,本文以当前点到目标区域的归一化距离使用正弦函数作为缓动函数,计算归一化距离中0~1的平缓的内插值,即
盛庆余今年54岁,高级教师,中共党员,原江苏省金湖中学副主任。2017年2月,他作为淮安市第九批援疆干部人才来到七师高级中学,担任化学教研组组长。
农作物的各种农艺性状通常为数量性状,而且相互影响,相互关联。根据红花主要农艺性状间的关系,对产量影响最大的分枝总数与茎粗、株高、单株有效果球数[9]密切相关,在栽培上,应以提高单株有效果球数为主攻方向,而把单株无效果球数、一级分枝数控制在适当的水平上[10]。种子百粒重和第1级分枝数可以作为丰产栽培的主攻性状[11]。通过调整播种期和种植密度对茎粗进行调节,适时早播的红花茎粗较粗,种植密度越稀茎粗越粗。
(2)
其中,s为用户起始点到AOI距离的归一化距离;ratio为头部旋转的绝对角度与90°的比例,即
(3)
其中,h为头部实际旋转角度,在头部旋转达到最大角度(90°)时,距离物体较远,视场角内画面变化较小,此时ratio为1;当头部实际旋转较小时,引导头部旋转角度较小,ratio较小,使得视场角内画面变化不会很快,减小眩晕感[7]。
在选定AOI后,以当前点作为起点:
(1) 当从起点到中点区间,s的值从0增加到1,曲线平稳上升;
(2) 一旦穿过中点,s的值逐渐减小(从1到0),曲线平缓下降。
为了避免旋转速度太快,限制最大转动速度为16.2 °/s,图3是将头部从90°引导到自然前向(0°)的旋转速度曲线。
2.3 感兴趣区的选择
在研究目标区(感兴趣区)的选择中,很多算法中根据头部旋转的方向选择感兴趣区,判别依据单一,在简单场景中有较好的表现,但对于复杂场景,会导致感兴趣区频繁切换,且不区分虚拟对象自身性质。因此,本文提出一种头部引导重定向算法中感兴趣选择算法,实现复杂场景中物体较多环境下的感兴趣选择。
图3 式(2)中的旋转调节因子曲线
本文算法不仅依据对象夹角选择感兴趣区判别,还考虑对象自身性质、当前位置与对象距离等因素。对每个对象计算动态角度阈值区θ,视线只有在角度阈值区内时才进行重定向过程。如图4所示,只有视角落在θ区域内(即视角与相机到物体中心的向量夹角小于θ/2),才认定选取了该物体作为AOI,如绿线所示;当落在该区域外,如红线所示,则不认为其为感兴趣区。
图4 角度阈值区
动态角度阈值区的选择过程中,本文提出了一个计算角度阈值区选择函数,如式(4)和式(5)所示,其角度阈值区大小为–α<θ<α,有
4) 报警的分级工作。进一步完善报警的分级工作,应用在建的模拟培训系统,开发报警响应规程,各种故障、异常场景下的预案,对操作人员进行各种培训,提高操作响应能力。
(4)
(5)
其中,S为距离对象的距离;OtBL为对象外接球直径;l,w,h分别为对象长、宽和高,则有:①距离越远,即S越大,则角度阈值区越小;②对象尺寸越大,即OtBL越大,则角度阈值区越大;③对象越可能是感兴趣区,则角度阈值区越大,反之越小。其中,是否为感兴趣区的判断使用参数,对象长、宽和高中最小的值除以对角线长,当物体为正方形或者球体时,参数最大为0.707;若对象为狭长的物体,则其较不可能是感兴趣区,此时阈值区较小,因为大部分场景中狭长物体(如旗杆、路灯)不太会被选作感兴趣区,该参数可以根据实际场景中希望用户感兴趣的物体的属性做调整。
根据馆藏《麦华三小楷书黎畅九李铁夫生轶事并跋》内容,文中提到的李铁夫的9幅水彩画作品现均藏我馆。②这组水彩作品材质均为宣纸,但构图和用色方式与其它水彩画一致。此外,归入水彩的藏品中还有2幅也确认是在宣纸上用水彩完成。
通过阈值ω1和ω2调整宽度和感兴趣区置信度(具体形式可以根据虚拟场景中对象属性决定)的权重,使用Pico neo在测试场景中调整权值,根据实验结果推荐使用权值:ω1=0.5,ω2=1。
也就是那句话,让苏楠坚信,杨小水有隐衷。苏楠没讲出自己的怀疑,她问李峤汝,你母亲,是不是跟许武生有宿仇?
在多物体复杂场景中,如果视野同时落在多个AOI (area of interest)重合区,如图5所示,此时为了防止感兴趣区跳跃和角度阈值区冲突,将重合部分进行判断及处理,将重合区域划分到对应的角度阈值区中。
图5 视线落在多个感兴趣角度阈值区重合区域
通过2个简单的例子介绍本文算法:
(1) 物体角度阈值区有重合区域的情况。设场景中A,B,C为场景中3个物体,设水平轴表示角度θ=0,垂直轴表示角度θ=π/2,设根据上述角度阈值区计算方法,A,B,C3个物体该坐标系下的对应的角度阈值区及重合区域如图6所示。
图6 角度阈值区有交集
A,B,C的角度阈值区分别为(A1,A2)、(B1,B2)、(C1,C2),重合区域为(B1,A2)和(C1,B2)。
将虚拟对象的角度阈值区存储到数组[A1,A2,B1,B2,C1,C2]中,首先对任意2个相邻的角度阈值区有重合区域的虚拟对象(如A,B),重合部分为(B1,A2),调整A2和B1,即
Theoretical Construction of Socialist Eco-civilization System with Chinese Characteristics Xie Kezhen
(6)
对任意2个角度阈值区迭代计算,直至所有的相邻角度阈值区无重叠部分。
(2) 当角度阈值区被另一个角度阈值区完全包含,如图7所示,对象A的角度阈值区为(A1,A2)、对象B的角度阈值区为(B1,B2),重合区域为(A1,A2)。此时角度阈值区数组为[A1,A2,B1,B2],B1
