变刚度柔性机器人关节的设计与解耦控制方法
2019-08-05张明房立金孙凤孙兴伟
张明 房立金 孙凤 孙兴伟
摘 要:设计一种采用永磁变刚度装置的绳索驱动式柔性机器人关节,在不增加驱动力的情况下,增加关节刚度调整范围。详细阐述关节的机械结构和变刚度原理。利用雅可比矩阵和模型间静力学关系,得到关节刚度,位置和绳索伸长量的对应关系,实现了刚度与位置解耦。建立变刚度关节的动力学模型,以轨迹控制为目标,设计解耦控制器,搭建实验系统,验证本方案的可行性。采用永磁弹簧,绳索驱动的柔性关节可以有效的减小关节的质量,惯性和体积,同时具有较大的刚度调整范围以及较短的调整时间,较快的响应速度和较小超调量。此柔性关节的构型和控制方式也适用于多自由度柔性并联机器人关节的构建。
关键词:变刚度;磁弹簧;绳索驱动;解耦控制器;柔性关节
中图分类号:TP 24
文献标志码:A
文章编号:1007-449X(2019)07-0120-09
Abstract:The wiredriven flexible robot joint using permanent magnetic variablestiffness mechanism was designed, which increases the variablestiffness range, without increasing the driving tension. The principle and structure of the variablestiffness flexible robot joint were explained. The correspondence between joint stiffness, joint position and wire length were obtained by using the Jacobi matrix and the mechanics relationship between models, which realizes the decoupling of stiffness and position. The dynamic model of the variablestiffness joint was established, a decoupling controller was designed, based on the trajectory control,and the experimental system was set up to verify the feasibility of the scheme. Using permanent magnet spring and wiredriven, the flexible joint can effectively reduce the weight, inertia and volume of the joint,and at the same time, it has a greater variablestiffness range, a shorter stiffness adjustment time, a faster response and a smaller overshoot. This configuration and control method are also suitable for multidegree parallel flexible joints.
Keywords:variable stiffness; magnetic spring; wiredriving; decoupling controller; flexible joint
0 引 言
柔性變刚度机器人关节是不同于传统刚性机器人关节的一类刚度可调的柔性机器人关节,由于自身刚度可调,可以很大程度的提高人机安全性和环境适应性,已经成为未来机器人发展的重要方向[1-9]。国内外学者在柔性变刚度机器人关节方面已开展了大量的研究和探索,提出了很多的方案和设计。其中主要有:意大利技术研究所(IIT)基于一种弹簧组合设计了一种紧凑的柔性驱动单元AWAS-Ⅰ及改进版AWAS-Ⅱ[3-4],工作原理是通过改变弹簧在杠杆臂上的位置改变刚度,通过控制杠杆臂的转角实现操作臂的位置控制;德国宇航局的Sebastian Wolf等人提出基于可调预紧力进而改变机器人刚度的关节VSJoint和基于能量观点的FSJ[5-6];加拿大卡尔顿大学的Chad English等人,首先提出另外一种绳索驱动变刚度机器人[7],工作原理是关节两侧布置非线性弹簧,通过两个电机运动,改变弹簧的伸缩量来调节关节位置和刚度,构成一种拮抗式变刚度结构,这种形式与人类骨骼肌控制关节刚度与位置形式最接近。日本东京大学的Osada等人,又为上述结构设计出一种新的非线性拉力部件NST [8-9]。采用绳索驱动柔性变刚度机器人可将驱动单元和变刚度模块后置,特别在构建多自由度机器人时,可以极大地减轻操作臂的质量和惯量,从而解决传统串联模式,质量与惯量逐级递增引起的刚度变化能力不足的缺点。
以上文献中所涉及的绳索驱动变刚度部件的变刚度能力与电机输出力矩直接相关,在电机提供的有效拉力范围内,刚度变化范围往往较小。本文设计了一种新型的永磁变刚度部件,在不增加电机驱动力矩的情况下,增加了刚度的调整范围。该柔性变刚度机器人关节采用的绳索布置方式与现有绳索驱动柔性变刚度机器人关节比更加适用于多自由度并联柔机器人关节的构建。利用雅可比矩阵和模型间静力学关系,得到机器人关节刚度与绳索刚度的对应关系,实现刚度与位置解耦。建立了变刚度柔性机器人关节的动力学模型。以轨迹控制为目标,为该并联柔性机器人关节设计了解耦控制器,完成了理论模型推导和实验验证,验证了本方案的可行性。
1 柔性机器人关节机构描述
1.1 柔性关节装置介绍
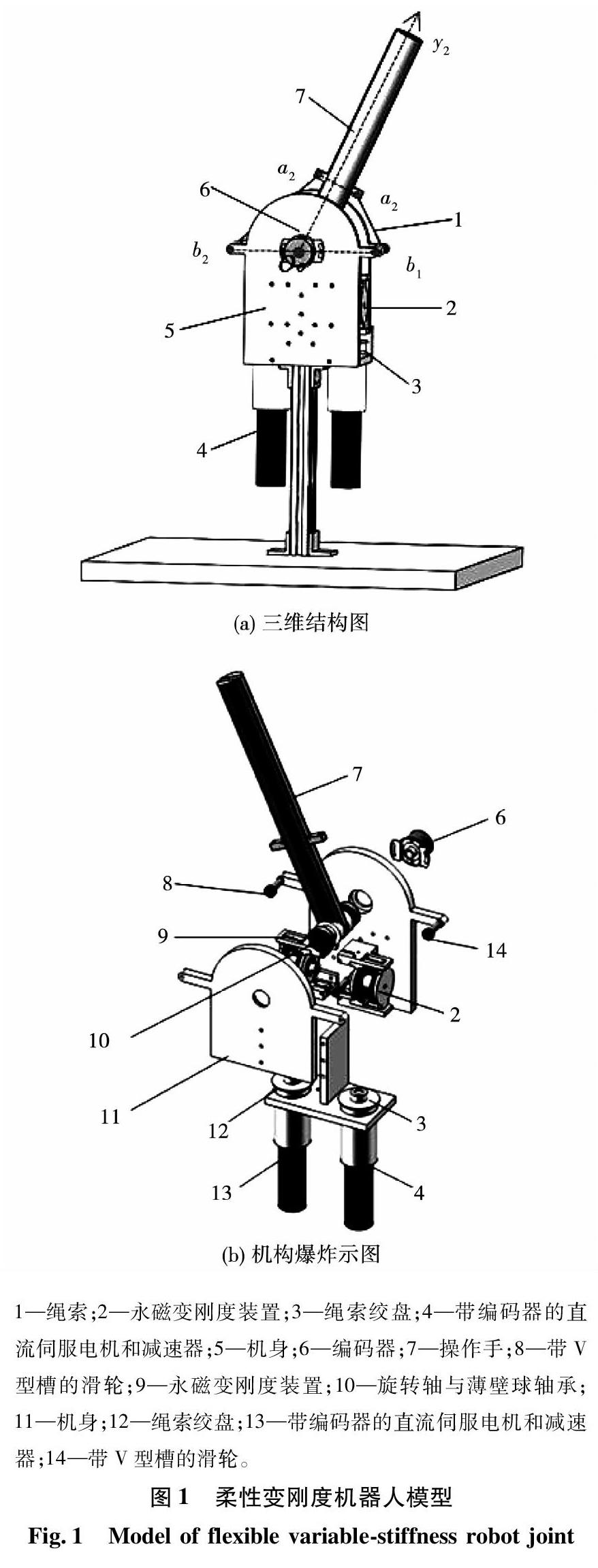
根据变刚度工作原理,完成了柔性变刚度机器人关节的三维模型设计与样机构建,如图1所示,柔性变刚度机器人关节的爆炸视图,如图1(b)所示。绳索,一端固定在操作手上,然后依次经过带V形槽的滑轮,永磁变刚度装置,带V形槽滑轮,最后固定于绳索绞盘上,操作手两侧对称布置两套上述结构,形成拮抗式变刚度机器人关节结构;其中永磁变刚度装置的定滑轮与带V形槽滑轮轴线平行且滑轮轮廓外切同一条直线;此种布置可以有效保证绳索的传动;操作手与永磁变刚度装置间设置有带V形槽滑轮,除了起绳索导向作用外,带V形槽滑轮与旋转轴间距离o0b1直接影响操作手的力学性能,因此可以根据实际需要调整o0b1距离。操作手7沿旋转轴10旋转,旋转轴10与编码器6同轴,由编码器测量操作手的实时位置,从而推算输出关节的实时刚度值。
之前学者构建的单自由拮抗式变刚度柔性关节大多是圆盘形关节两侧对称布置变刚度弹簧的柔性关节,但上述布置方式构成的变刚度关节的刚度与位置的解耦方式和关节结构并不适用于绳索驱动的多自由并联柔性关节的构建,本文设计的永磁柔性变刚度关节布置方式不但适用于单自由度也可以用于构建多自由柔性关节,并进行了相应的刚度与位置解耦研究。
1.2 变刚度装置介绍
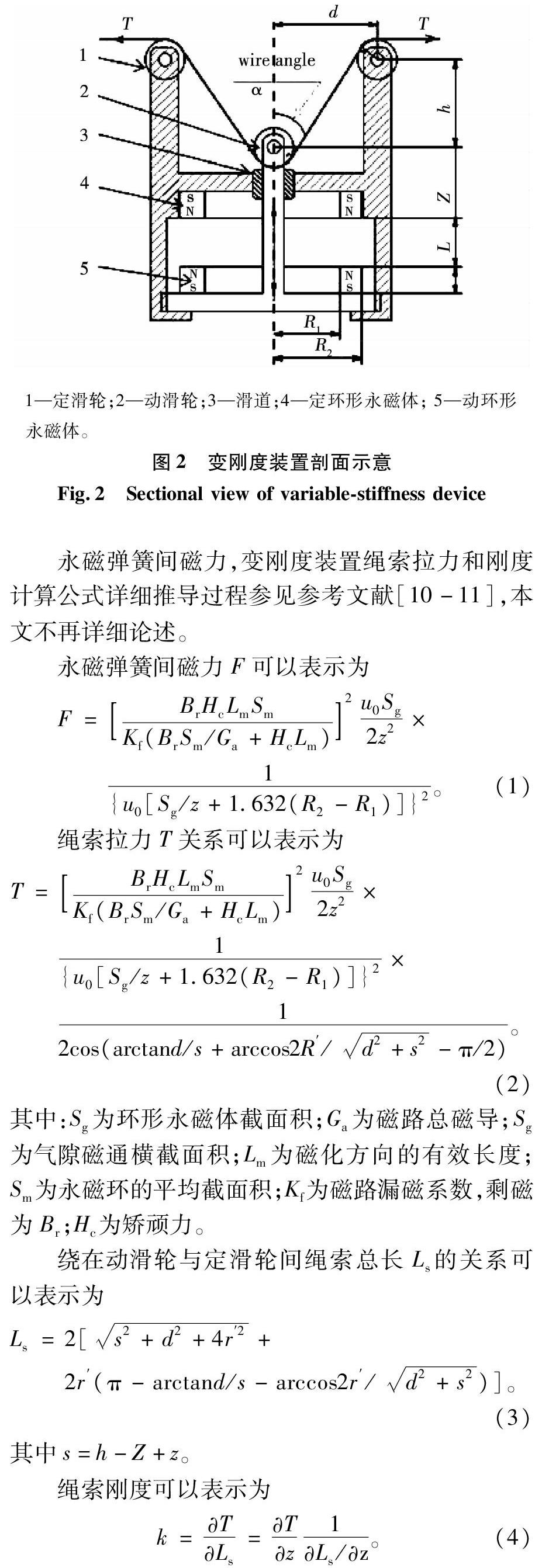
永磁变刚度装置的结构如图2所示。该结构主要由永磁弹簧单元和滑轮绳索单元构成。一对环形永磁体同轴,同磁极相对布置,由于滑道的限制,可移动永磁体只能沿轴向滑动,构成一组磁弹簧单元。磁弹簧轴向磁力和刚度随着气隙间距的减小呈非线性增加。可以根据力和刚度的要求,布置多组,一组是实现此功能的最少组数。滑轮绳索单元由一个动滑轮,两个定滑轮和绕在期间的绳索组成,动滑轮与定滑轮间呈等腰三角形布置。在绳索上施加一定力时,动滑轮带动滑台向上移动,永磁体间气隙减小,夹角α增加。绳索拉力T与永磁体间磁力F近似关系为T=F/2cosα,绳索拉力增加。同理可知绳索刚度变化范围也进一步增加。在绳索拉力一定的情况下,永磁弹簧的非线性和绳索单元的非线性组合使刚度的变化范围增加。因此,用永磁弹簧代替传统定刚度金属弹簧[12]的好处是,实现同样的刚度变化范围,绳的拉力就不需要那么大,进而可以减小电机功率与体积。改变磁弹簧单元和绳索单元结构参数,可以改变拉力和刚度曲线的变化范围和斜率,进而更好的应用到具体工况中。
永磁弹簧间磁力,变刚度装置绳索拉力和刚度计算公式详细推导过程参见参考文献[10-11],本文不再详细论述。
将永磁体参数和表1中变刚度装置的结构参数代入数学模型中,计算分析其力学和刚度特性。当轴向气隙z从0.5 mm变化到14.5 mm,永磁体间磁力F,绳索拉力T的计算结果和实验测量结果如图3和图4所示。由结果可知永磁体间磁力F,绳索拉力T随着永磁体间轴向气隙z的减小而增大,且呈非线性变化,刚度变化规律与绳索拉力变化规律基本一致。这是由于在拉动绳索的过程中,永磁体间气隙减小,同极相对的环形永磁体间的气隙磁阻随轴向气隙位移z减小而减小,磁场强度随之增加。绳索刚度变化比永磁体间刚度变化范围增加364.34%,绳索拉力比永磁体间磁力增加136.46%,这是由于在拉动绳索的过程中,夹角α随着永磁体间气隙的减小而增加,从而进一步增加了绳索拉力与刚度的变化范围。这说明,在拉力一定的情况下,上述结构可以增加刚度变化范围,理论计算与实验测量的绳索拉力变化趋势保持一致,但是理论计算值高于实验测量值,平均误差在6.76%以内,其原因在于数学模型没有考虑其他部分磁阻对磁路的影响,且实际情况永磁体间漏磁较严重,绳索并非完全刚性等。
2 静力学分析与刚度解耦
建立坐标系如图5所示,参考坐标系O0x0y0固定在机架上,O0与此时的旋转轴方向重合;坐标系O1x1y1固联在转轴上,O2x2y2是操作手坐标系。在绳索驱动的并联机器人研究中大都默认绳索为刚性,通常以绳索长度作为机构运动的广义坐标,而绳索长度通过测量驱动电机的转角可以获得,因此较容易建立起末端操作手位姿的笛卡尔空间与绳索空间(称绳索长度描述的空间为绳索空间)的映射关系,较容易地实现操作手的位置控制。绳索通過变刚度装置与操作手连接,此时通过测量电动机转角获得的绳索长度包含两部分:一部分是由操作手位姿变化产生,而另一部分是由变刚度装置的弹性变形产生,即柔性变刚度机器人存在位置与刚度的耦合。因此,用绳索长度坐标就无法描述操作手的位姿。如能建立起末端操作手的刚度和位置,与变刚度装置刚度的映射关系,就能实现刚度与位姿的解耦。
其中:Kθ为操作手刚度;J1和J2分别为雅可比矩阵J第一项和第二项。给定操作手位置θ和对应刚度Kθ,采用Newton法对式(2),式(4),式(5)和式(14)构成的非线性方程组进行求解,可以得到对应的永磁变刚度装置刚度k1和k2,对应绳索伸长量Ls1和Ls2。
3 系统动力学模型与控制器设计
3.1 系统动力学建模
动力学模型是控制系统设计的基础,其准确性直接影响控制系统的性能。由于永磁变刚度装置的引入,为了获得好的控制效果,必须要考虑系统的弹性效应。为了简化理论分析,又不失一般性,在动力学建模时作以下假设。系统的弹性变形主要是由永磁变刚度装置引起的,忽略绳索的弹性变形,将其简化为刚性绳。驱动电机及减速器的质心在各自的转轴上。系统的动力学模型主要分为操作手和驱动器两部分,其中前者是非线性耦合的,后者是线性解耦的。考虑永磁变刚度装置的弹性效应,利用拉格朗日方程得到系统的动力学方程。
该系统采用位置与刚度混合控制策略,结构框图如图6所示,给定操作手位置θd,采用刚性并联机器人位姿变换关系,可以得到由操作手位姿变化引起的绳索长度变化量f1(θd)和f2(θd)。给定操作手刚度Kθ,采用Newton法对式(2),式(4),式(5)和式(14)构成的非线性方程组进行求解,可以得到控制操作手刚度的对应绳索长度Ls1和Ls2。那么此时两条绳索长度变化量就为f1(u)+Ls1和f2(u)+Ls2。这样就实现了位置与刚度的解耦控制。然后两个伺服驱动电机,采用PD位置控制。上述解耦控制器充分考虑了刚度改变时引起的操作臂柔性的不同,实现了操作臂位姿准确控制,也实现了刚度控制。这种方法简单,容易实现,实用性强。
4 试验验证与分析
为了进一步测试永磁变刚度柔性机器人关节的性能,搭建了变刚度柔性機器人关节试验系统,如图7所示。该柔性关节的相关参数如表2所示。永磁变刚度柔性机器人关节样机,驱动器型号为maxon ESCON70/10;控制器为DSpace1103。试验通过与设备配套的MATLAB/Simulink实时控制软件直接编写控制程序进行控制实验。
4.1 刚度与位置解耦验证
刚度与位置的解耦验证,关节水平放置,操作手末端无负载。通过两种工作情况进行验证,第一种,保持关节刚度不变,改变关节位置,关节刚度Kθ=20 N·m/rad,关节从0°运动到30°的过程中,关节位置与两个电机转角的理论计算和实验测量结果如图8(a)和图8(b)所示。关节转角理论计算与测量基本保持一致,误差在1.2%以内。随着关节转角的增加,编码器测量到的关节转角略小于关节的理论计算值,那是由于系统存在摩擦,还有就是理论计算时关节的名义参数与实际值可能会略有偏差造成的。调整关节位置的过程中,两个电机的转角理论值与实际值一致,理论计算值略高于编码器返回值,是由于电机控制参数未变,在关节运动的过程中,绳索上的拉力增加,导致电机转角有略微不到位造成的。
第二种,保持关节位置不变,改变关节刚度,保持关节角度θ=5°不变,改变关节刚度,Kθ从5 N·m/rad增加到40 N·m/rad的过程中,关节刚度与两电机转角的理论计算和实验测量结果如图8(c)和图8(d)所示。保持关节位置不变,刚度理论值和测量值基本保持一致。
理论计算刚度与实验测量刚度误差范围在8.9%以内,那是由于由于变刚度装置理论计算值与测量值本身就存在误差,经过非线性解耦计算后这个误差依然存在。还有就是关节刚度与位置存在耦合,由于关节名义参数与实际值存在误差,进一步增加了误差产生的可能性。改变关节刚度过程中,两个电机转角的计算与实际值基本一致,略微有少许偏差,计算值略大于实际值。这是由于关节刚度增加的过程中,绳索上的拉力增加,导致电机转角有略微不到位。从上述实验结果可以证明本文所述的刚度与位置的解耦方法,基本可以实现解耦与控制精度要求。
4.2 位置响应试验
位置阶跃实验,操作手末端作用0.3 kg负载,伺服电机驱动柔性关节操作手快速运动到10°位置。试验中将柔性关节的刚度值分别设定为30 N·m/rad, 150 N·m/rad,位置响应曲线如图9所示,关节刚度K2=150 N·m/rad时,柔性关节只有很小的超调量且调节速度最快,振荡调节时间约为0.18 s。当关节刚度K1=30 N·m/rad 时,驱动器的超调振荡明显增加,振荡调节时间也相应增加,约为0.26 s,不同关节刚度条件下,此柔性关节的超调量都较小,调整时间也较短,这是由于绳索与操作手间设置有永磁变刚度装置,当位置超调量增大时,绳索拉力与绳长变化量呈非线性关系增加,因而抑制超调的能力更强。由于永磁变刚度弹簧是非接触式的,机构间摩擦力更小,因此响应更快。
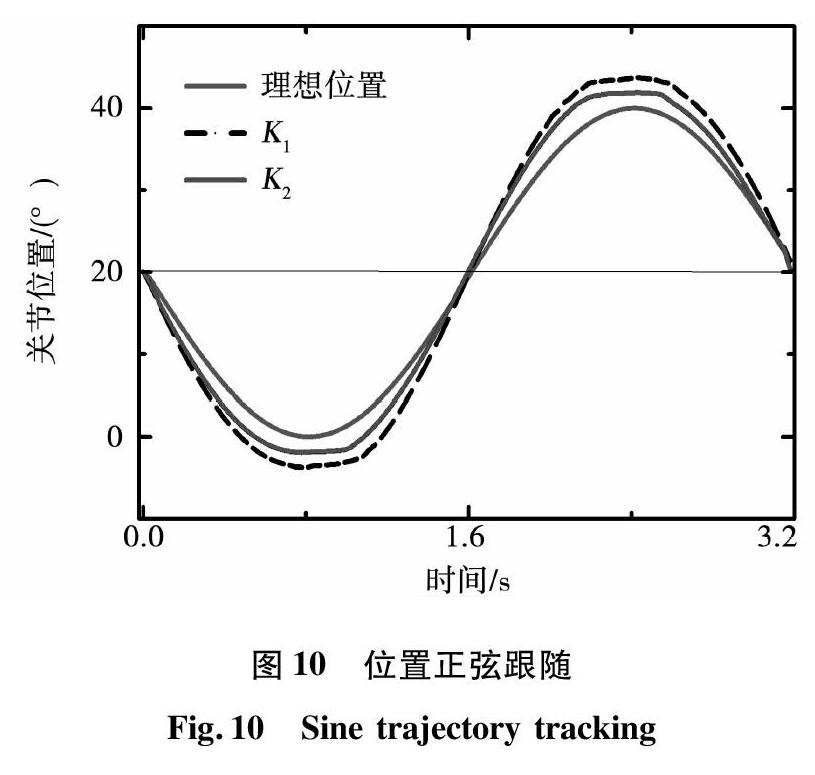
关节水平放置,给关节位置正弦跟随信号。关节转动方向与重力矩方向垂直,进行位置正弦跟随试验。在操作手末端作用0.3 kg负载,操作手长度为250 mm,两个伺服电机通过绞盘绳索配合,驱动操作手做位置正弦摆动,相应位置输入曲线,幅值设置为40°,周期为3.2 s。试验中分别调节柔性关节刚度为30 N·m/rad,150 N·m/rad,相应轨迹跟踪曲线如图10所示,当柔性关节刚度较大时,具有较好的跟随效果,此时的跟随误差最小,随着刚度值的降低,跟随误差逐渐增大。说明操作手质量与惯性和刚度对轨迹跟踪误差有较明显的影响。
4 结 论
1)本文提出了一种新型的采用永磁变刚度装置的绳索驱动式柔性机器人关节,主要新颖之处是采用同磁极相对布置的环形永磁体和滑轮绳索结构构成永磁变刚度装置,在不增加绳索拉力情况下,增加了刚度调整范围。可以通过修改永磁变刚度装置结构参数,适应不同工作情况要求。
2)对关节空间和绳索空间的映射关系进行推导,利用雅可比矩阵和模型间静力学关系,得到机器人刚度与绳索刚度的对应关系,实现关节刚度与位置解耦。该解耦方法与构型不但适用于现有关节,也适用于多自由度柔性并联关节。
3)该柔性机器人关节具有较小的质量,惯量,体积,较短的刚度调整时间和较大的刚度调整范围,实验结果表明该解耦控制器可以实现柔性关节位置与刚度的解耦,并具有较快的响应速度和较好的轨迹跟踪能力。在今后的工作中将考虑动态建模和参数摄动的实时控制方法,争取柔性机器人在实际工作中尽早的得到应用。
参 考 文 献:
[1] 王伟,刘立冬, 魏来,等. 柔性齿条式变刚度关节驱动器设计与研究[J].机械工程学报, 2016, 52(1):26.
WANG Wei, LIU Lidong, WEI Lai, et al. Design and research of rackbased variable stiffness actuator[J]. Journal of Mechanical Engineering, 2016, 52(1): 26.
[2] 王颜, 房立金. 机械式仿骨骼肌肉变刚度机构原理及设计[J]. 机器人, 2015 37(4): 507.
WANG Yan, FANG Lijin. Principle and design of mechanically musculoskeletal variablestiffness mechanism[J]. Robot, 2015, 37(4):507.
[3] JAFARI A, TSAGARAKIS N. G, CALDWELL D G. A novel intrinsically energy efficient actuator with adjustable stiffness[J], IEEE//ASME Transactions on Mechatronics, 2013, 18(1):355.
[4] TSAGARAKIS N G, SARDELLITTI I, CALDWELL D G. A new variable stiffness actuator (CompactVSA): design and modelling[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco, CA,USA, 2011: 174-179.
[5] WOLF S, HIRZINGER G. A new variable stiffness design: matching requirements of the next robot generation[C]//IEEE International Conference on Robotics and Automation. Pasadena, CA,USA, 2008: 1741-1746.
[6] WOLF S, EIBERGER O, HIRZINGER G. The DLR FSJ:Energy based design of a variable stiffness joint[C]//IEEE International Conference on Robotics and Automation. Shanghai China, 2011: 5082-5089.
[7] ENGLISH C, RUSSELL D, Implementation of variable joint stiffness through abtagonistic actuation using rolamite springs[J].Mechanism and Machine Theory, 1999: 34,27-40.
[8] OSADA M, ITO N, NAKANISHI Y, et al. Realization of flexible motion by musculoskeletal humanoid “Kojiro” with addon nonlinear spring units[C]//IEEE/RAS International Conference on Humanoid Robots. Piscataway, USA: IEEE, 2010: 378-383.
[9] NAKANISHI Y, ITO N, SHIRAI T, et al. Design of powerful and flexible musculoskeletal arm by using nonlinear spring unit and electromagnetic clutch opening mechanism[C]//IEEE/RAS International Conference on Humanoid Robots Piscataway, USA: IEEE, 2011: 377-382.
[10] QIAN K X, ZENG P, RU W M, et al. Novel magnetic spring and magnetic bearing[J]. IEEE Transactions on Magnetics, 2003, 39(1):559.
[11] SUN F, ZHANG M, JIN J, et al. Mechanical analysis of a threedegree of samestiffness permanent magnetic spring[J].International Journal of Applied Electromagnetic and Mechanics, 2016,52(1/2):667.
[12] 孙龙飞, 房立金. 基于变偏置力矩的双电机系统消隙控制方法研究[J]. 电机与控制学报, 2017, 21(03):89.
SUN Longfei, FANG Lijin. Antibacklash control method of dualmotor driving system based on switching bias torque[J]. Electric Machines and Control, 2017, 21(03):89.
[13] 隋春平, 赵明杨. 3自由度并联柔索驱动变刚度操作臂的刚度控制[J]. 机械工程学报, 2006, 42(6):205.
SUI Chunping, ZHAO Mingyang. Statics and stiffness study on a 3DOF parallel wire driven flexible manipulator[J]. Journal of Mechanical Engineering, 2006, 42(6):205.
[14] 隋春平, 张波, 赵明杨, 等. 一种3自由度并联柔索驱动柔性操作臂的建模与控制[J]. 机械工程学报, 2005, 41(6):60.
SUI Chunping, ZHANG Bo, ZHAO Mingyang, et al. Modeling and control of a 3DOF parallel wire driven flexible manipulator[J]. Journal of Mechanical Engineering, 2005, 41(6):60.
[15] CHEN P, LI H. A decoupled control method based on MIMO system for flexible manipulators with FSSEA[C]//IEEE Conference on Robotics and Biomimetics. Zhuhai, China: IEEE, 2015: 662-667.
[16] PAINE N, MEHLING J S, HOLLEY J, et al. Actuator control for the NASAJSC valkyrie humanoid robot: a decoupled dynamics approach for torque control of series elastic robots[J]. Journal of Field Robotics, 2015, 32(3):37.
(編辑:刘素菊)
