基于瞬时环流控制的改进逆变器并联控制策略
2019-08-05马骏杰王旭东金宁治白亚丽王光
马骏杰 王旭东 金宁治 白亚丽 王光
摘 要:针对逆变器并联系统在负载动态变化时输出电压变化较大问题,提出一种逆变器均流控制方法。单机控制策略上,在传统的带输出电压前馈和有效值电压调节器的双闭环控制基础上,增加负载电流前馈,并从2个角度分析了负载电流前馈控制对提升系统动态性能的优势;并机控制策略上,以瞬态调节控制器为基础,通过对环流的有功和无功分量进行下垂控制来调节有效值环的给定和锁相环的输出角度。最后,建立6台20 kVA逆变器所构成的并机系统。实验结果表明,这种控制方式可极大降低系统的不均流度,与传统的硬件均流控制相比不易受干扰。同时,这种控制方式又表现出很好的动、稳态特性。
关键词:负载电流前馈;下垂控制;均流调节;瞬时闭环控制;并联控制器
中图分类号:TM 464
文献标志码:A
文章编号:1007-449X(2019)07-0063-09
Abstract:For the issue that the voltage of the inverter parallel system changes greatly with the output load dynamic changes, an improved currentsharing control method was proposed. Based on the traditional inverter model with output voltage feedforward and double closeloop control method, the loadcurrent feedforward control method was added. The effect of loadcurrent feedforward control on the dynamic performance was analyzed in two different ways. Besides, based on the instantaneous closedloop controller, the proposed regulator of the parallel system was designed according to the droop characteristic of the current circulation. Finally, a parallel system with 6×20 kVA inverters was established. The experimental results show that with the proposed control method, the currentsharing error of the system is greatly decreased. Compared with the traditional method by the hardware signals, this method is not susceptible to interference. And the results also show that the proposed method has good steadystate and dynamic performance.
Keywords:current feedforward; droop control; currentsharing regulation; instantaneous closedloop control; parallel controller
0 引 言
逆變器的并联运行是提高电源系统可靠性和扩大供电容量的一种重要途径。相比于单台逆变器,多个较小容量的逆变模块并联不仅成本低、易维护,而且更为灵活、可靠,通过改变并联模块的数目,可以获得不同的容量。逆变器的并联广泛应用于不间断供电电源(uninterruptible power system,UPS)供电系统,光伏发电、风力发电等绿色再生能源的分布式发电系统。逆变器的并联可看成系统环流的最小化控制,其目的是使负载的功率能够在逆变器之间实现均分,是通过调节变流器输出电压的幅值、相位来实现的。
逆变器并联控制技术主要有以下方案:下垂控制法,有功及无功功率调节法和瞬态电流控制法[1-2]。下垂控制法是利用并机系统自身输出功率的大小来调节逆变器输出电压的频率和幅值,根据并机系统的输出阻抗性质来设计下垂控制器,该方法能够快速降低系统的不均流,但存在输出电压精度和均流度之间的矛盾,在实际系统中很少单独使用,因而产生了 “虚拟阻抗法”的调节方式,这种方式一方面增加了控制的复杂程度,另一方面负载适应性较差;有功及无功功率调节法[3-4]是通过CAN总线传输各台机器的有功及无功分量,各台机器一方面接收系统其他机器的信息用于计算系统平均功率,并通过自身功率的偏差来调节各自逆变器输出电压的幅值和角度,另一方面将本机计算出的有功及无功分量放入CAN总线。CAN总线传输的是数字信号,因此抗干扰能力较强,但该方式调节的速率和调节精度取决于CAN总线的数据传输速率,动态响应速度慢且软件计算量较大;瞬态电流控制法属于瞬态控制方案[5-7],它是利用各机之间的平均电流模拟信号线与自身负载电流产生的瞬时环流调节自身瞬时输出的电压,该方法简单,动态响应速度快,可取得很好的均流效果,是单相逆变器并联控制中最常用的方式,但模拟信号线抗干扰能力差,需增加大量的滤波环节。
为提高系统性能,相关文献在环路控制方面做了很多研究。增加参考电压前馈提高了输出电压对参考电压的跟踪能力,但需严格控制电压前馈以避免系统出现过增益[8];增加有效值闭环来提高系统的稳压精度,但使得系统的动态性能变差[9]。
在保证系统稳态性能的基础上,提高系统的动态特性,本文在逆变器的环路设计上增加了负载电流前馈控制。此外,在并机均流控制策略上,本文在瞬时控制方案的基础上,提出了一种更易于工程实现的工频设计方法,即利用环流的有功分量和无功分量的解耦关系来对各自输出电压的幅值和相位进行下垂调节,一方面解决了单机系统中增加的输出电压有效值闭环而带来的输出电压随负载电流外特性硬化的问题;另一方面降低了残留的电流静差,弥补了瞬态控制稳定性较差的问题。实验结果验证了所提控制方案的有效性。
1 输出电压控制器设计
1.1 带有效值环和电压前馈的双闭环控制
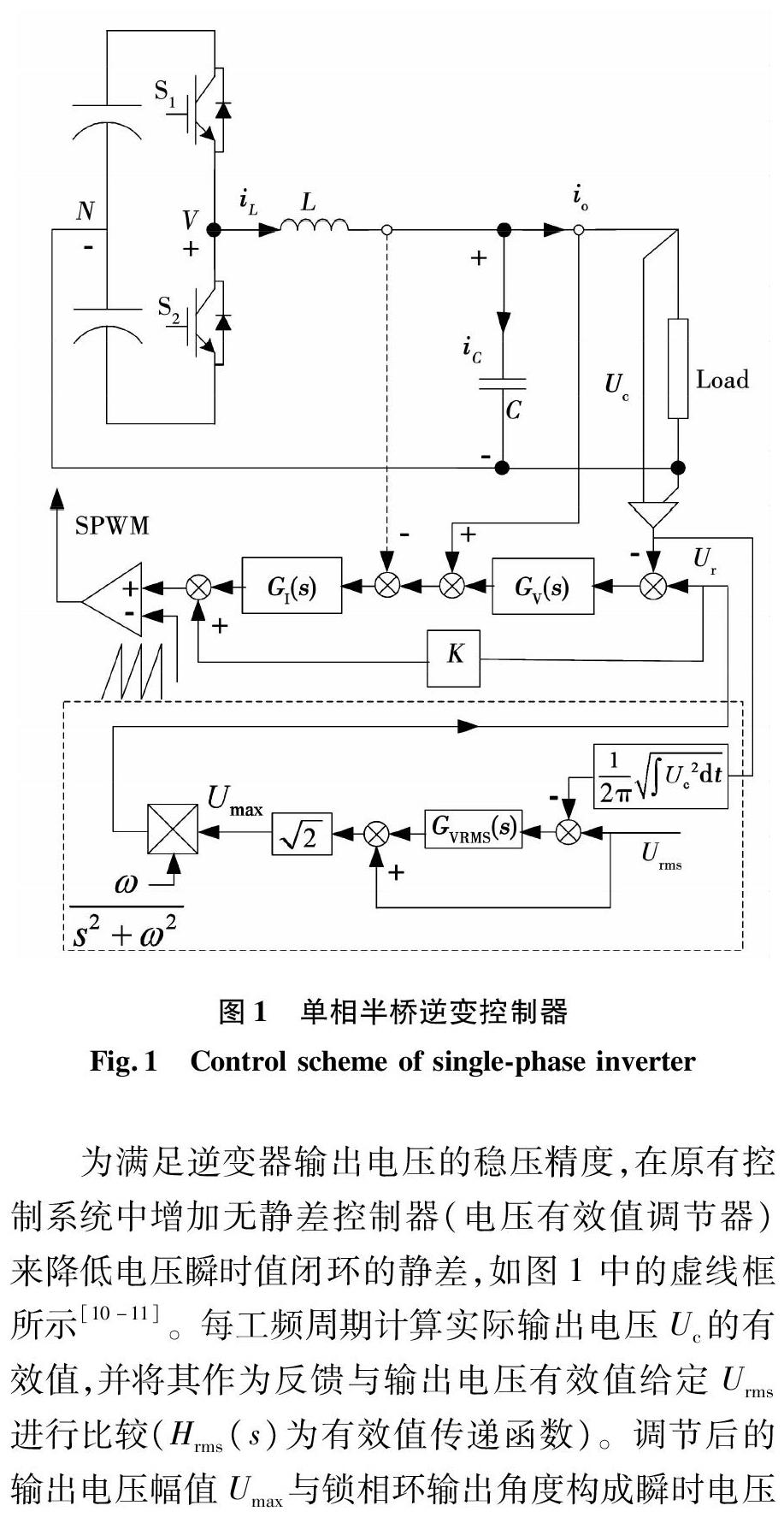
图1为正、负直流母线结构的单相半桥式逆变器等效电路模型。该控制器采用加入参考电压前馈的电压电流双闭环控制方法。
为满足逆变器输出电压的稳压精度,在原有控制系统中增加无静差控制器(电压有效值调节器)来降低电压瞬时值闭环的静差,如图1中的虚线框所示[10-11]。每工频周期计算实际输出电压Uc的有效值,并将其作为反馈与输出电压有效值给定Urms进行比较(Hrms(s)为有效值传递函数)。调节后的输出电压幅值Umax与锁相环输出角度构成瞬时电压外环的给定Ur。
文献[9]表明有效值环可消除由逆变器等效输出阻抗引起的电压跌落,但实际上有效值环的加入还能提高系统的稳态特性,降低输出电压的总谐波失真(total harmonic distortion, THD)。
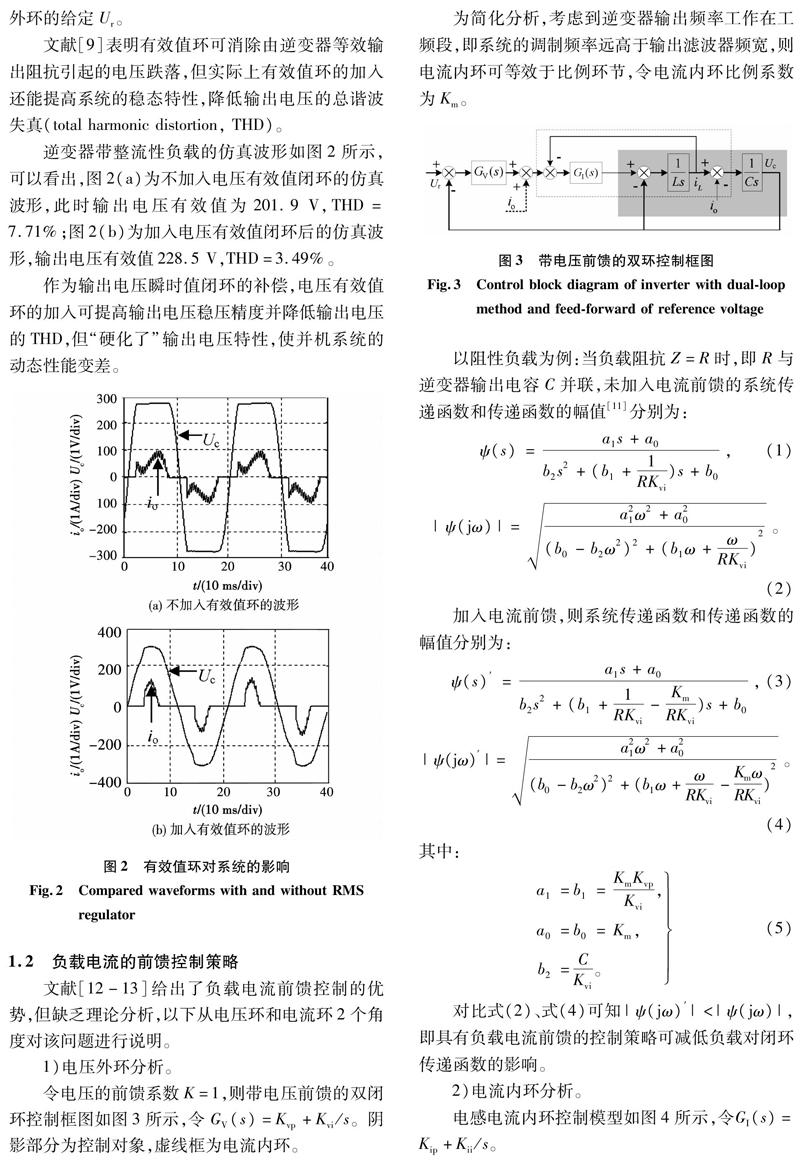
逆变器带整流性负载的仿真波形如图2所示,可以看出,图2(a)为不加入电压有效值闭环的仿真波形,此时输出电压有效值为201.9 V,THD=7.71%;图2(b)为加入电压有效值闭环后的仿真波形,输出电压有效值228.5 V,THD=3.49%。
作为输出电压瞬时值闭环的补偿,电压有效值环的加入可提高输出电压稳压精度并降低输出电压的THD,但“硬化了”输出电压特性,使并机系统的动态性能变差。
1.2 负载电流的前馈控制策略
文献[12-13]给出了负载电流前馈控制的优势,但缺乏理论分析,以下从电压环和电流环2个角度对该问题进行说明。
1)电压外环分析。
令电压的前馈系数K=1,则带电压前馈的双闭环控制框图如图3所示,令GV(s)=Kvp+Kvi/s。阴影部分为控制对象,虚线框为电流内环。
为简化分析,考虑到逆变器输出频率工作在工频段,即系统的调制频率远高于输出滤波器频宽,则电流内环可等效于比例环节,令电流内环比例系数为Km。
以阻性负载为例:当负载阻抗Z=R时,即R与逆变器输出电容C并聯,未加入电流前馈的系统传递函数和传递函数的幅值[11]分别为:
2)电流内环分析。
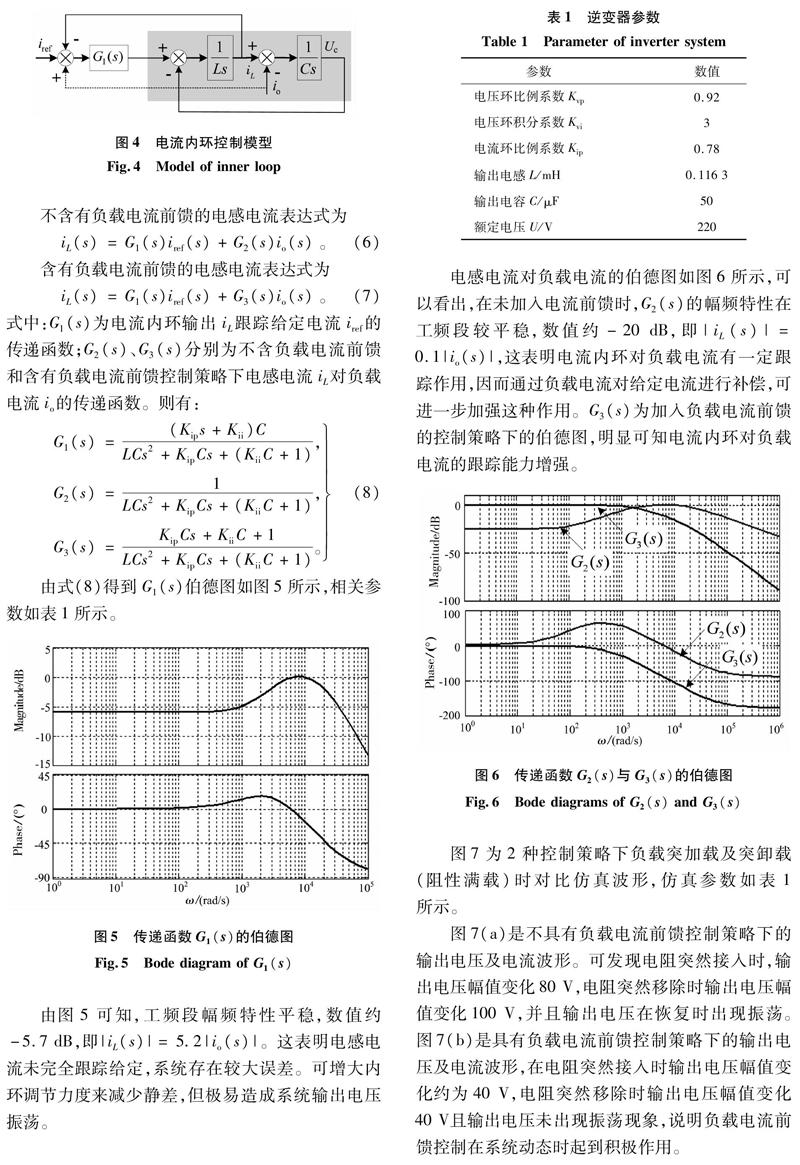
电感电流内环控制模型如图4所示,令GI(s)=Kip+Kii/s。
由式(8)得到G1(s)伯德图如图5所示,相关参数如表1所示。
由图5可知,工频段幅频特性平稳,数值约-5.7 dB,即|iL(s)|= 5.2|io(s)|。这表明电感电流未完全跟踪给定,系统存在较大误差。可增大内环调节力度来减少静差,但极易造成系统输出电压振荡。
电感电流对负载电流的伯德图如图6所示,可以看出,在未加入电流前馈时,G2(s)的幅频特性在工频段较平稳,数值约-20 dB,即|iL(s)|=0.1|io(s)|,这表明电流内环对负载电流有一定跟踪作用,因而通过负载电流对给定电流进行补偿,可进一步加强这种作用。G3(s)为加入负载电流前馈的控制策略下的伯德图,明显可知电流内环对负载电流的跟踪能力增强。
图7为2种控制策略下负载突加载及突卸载(阻性满载)时对比仿真波形,仿真参数如表1所示。
图7(a)是不具有负载电流前馈控制策略下的输出电压及电流波形。可发现电阻突然接入时,输出电压幅值变化80 V,电阻突然移除时输出电压幅值变化100 V,并且输出电压在恢复时出现振荡。图7(b)是具有负载电流前馈控制策略下的输出电压及电流波形,在电阻突然接入时输出电压幅值变化约为40 V,电阻突然移除时输出电压幅值变化40 V且输出电压未出现振荡现象,说明负载电流前馈控制在系统动态时起到积极作用。
2 负载电流和参考电压前馈的双闭环输出阻抗特性
2台逆变器并联控制系统框图如图8所示,并机控制系统方程为:
式中:Ur1(s)、Ur2(s)分别为2台逆变输出电压瞬时值给定;UV1(s)、UV2(s)分别为2台逆变器桥臂中点电压;iL1(s)、iL2(s)分别为2台逆变器输出滤波电感电流;io1(s)、io2(s)分别为2台逆变器负载电流;io(s)为系统的负载平均电流;GV(s)、GI(s)分别为系统输出电压瞬时值控制器和电感电流控制器。
由式(11)可知,输出阻抗与系统硬件及控制参数有关。令Kvi为变量,GV(s)=Kvp+Kvi/s,GI(s)=Kip+Kii/s,其余参数见表1,得到伯德图如图9所示。
由图9可知,并机系统的输出阻抗可依据控制参数的变化而变化,因此通过合理的参数配置,可以将系统的输出阻抗配置为阻性、感性或阻感性。以输出阻性负载为例来说明均流控制策略。
3 基于环流下垂的并机复合控制
所提出的均流控制方案是在瞬态控制的基础上,通过对环流的有功分量和无功分量进行下垂控制来调节电压有效值环的给定和锁相环的输出角度。并联系统控制结构框图如图10所示。
各台逆变器通过硬件电路获取负载平均电流,与本机输出电流通过差分电路得到环流瞬时值。该瞬时值经数字信号控制器(digital signal controller,DSC)的数模转换单元采样后,经离散傅里叶变换(discrete fourier transform,DFT)得到系统环流功率中有功和无功分量,进而实现环流功率的调节。
3.1 瞬时环流控制
瞬时环流控制是单相逆变器常用的均流控制方式[14-15]。该方案简单,动态响应速度快,但易受硬件干扰而造成逆变器之间平均电流的波动。环流瞬时值闭环控制系统模拟框图如图11所示。其中:io(s)为并联系统负载平均电流,由硬件平均得到;ioj(s)为第j号逆变器(j=1,2,3,…)输出负载的电流瞬时值;Ur(s)为输出电压瞬时值给定;GVC(s)为输出电压瞬时值环闭环传递函数;GIcir(s)为瞬时环流校正控制器。
3.2 环流有功及无功分量的下垂控制
电压有效值环的加入“硬化了”逆变器的输出特性,且传统的瞬时环流控制极易受到硬件干扰,从而降低稳态均流效果。为了在保证系统输出电压稳压精度的前提下提高系统的均流度,在瞬时环流控制的基础上将环流信息进行有功和无功分解,继而分别对有效值环的电压给定及数字锁相环的输出角度进行下垂控制,从而进一步消除环流对并机系统的影响。
以逆变器输出阻抗为电阻为例,并简化分析令r1=r2=r,2台逆变器并联系统等效电路模型如图12所示。
当2台逆变器输出电压幅值Uo1≠Uo2,但相位相等时,并联系统的环流可表示为
由式(12)可知,输出电压幅值的偏差仅产生基波环流的有功分量。通过构建如图13(a)所示的幅值校正控制器来改变输出电压有效值环的给定值Urms(s),从而达到改变输出电压幅值的目的。为满足并联系统输出电压幅值有差的要求,将GIcirP(s)设计成比例积分控制器,表达式为
实验发现,系统带轻载时输出电压会出现不稳定现象,控制器可采用变系数方式快速调节自身输出电压幅值来消除差异:例如小于10%额定负载时b=1,否则b=0。
当2台逆变器各自输出电压幅值Uo1=Uo2=U,但相位存在差异时,并联系统的环流可表示为
由式(14)可知,可调节输出电压相位来调节无功功率,其控制框图如图13(b)所示(Δθ(s)为逆变锁相环输出)。将GIcirQ(s)设计为比例环节,比例系数为KpcirQ。由于输出滤波电感很小,输出电压存在较小相位差就会产生较大的基波无功环流,因此参数KpcirQ取值要小以保证系统的稳定性。
各逆变器在采样周期实时检测自身的瞬时环流,利用DFT分析法求得瞬时环流的基波有功分量和基波无功分量分别为:
4 实验验证
实验由6台20 kVA 逆变器构成的并联系统对所提的方案进行验证。从负载适应性、系统输出带不等长功率线及硬件存在高频干扰等情况下验证系统的动态及稳态性能。
1)图14为并联系统带阻性满载时输出电压波形Vout和输出电流波形Iout。可以看出,稳态时1#机和6#机的输出电压稳定,动态时电压没有突变,输出电流均流度良好。
2)为了验证该并机控制策略在系统硬件存在干扰时的稳定性,将6#样机DSC控制器的电流AD采样通道加入高频振荡Vr,系统带线性负载6×90%,观察如图15所示的6#机和1#机输出电流Iout。可以看出,将振荡频率从57 Hz加至2 kHz,尽管本机输出电流叠加了高频振荡,但输出电流波形未发散,仍处于可控范围内且对系统中其他机器输出电流影响较小,保证系统均流度及稳定性。
3)为验证该并机控制策略在输出功率线缆长度差异较大情况下的稳定性,将并机系统中6#机的输出功率线延长至10 m并串联电感,电感量为0.148 mH,其余5台逆变器输出功率线为3 m。将6台机器共同接入负载端,观测6#机及1#机输出电流Iout和并机系统输出电压Vout波形,如图16所示。
可以看出,系统带阻性负载和整流性负载的情况下,系统输出电压稳定,输出电流没有出现振荡,系统均流度较好。
4)为了验证系统在跟踪源频率持续变化时的稳定性,调节源频率在跟踪范围45~60 Hz内持续变化,将1#~3#机加入和退出6并机系统,观察此时系统输出电压Vout、1#机和6#机输出电流Iout和6#机母线电压Vdc情况。
机器加入或退出6并机系统时波形如图17所示,可以看出,在机器加入和退出并机系统的瞬间,电流不存在冲击,且只需半个工频周期的时间,均流环会将系统的均流度调整到理想状态。此外,母线电压也没有出现突变现象。
5 结 论
本文所提出的以瞬时环流控制为主,以系统间并机环流构成的下垂控制为辅的逆变器并机控制方案成功应用于6台20 kVA系统中。为验证本文所提并机均流控制方案的合理性,实验从负载适应性、系统输出带不等长功率线及硬件存在高频干扰等情况下对并机系统的动态及稳态性能进行了验证。通过实验结果可看出,本文提出的并机均流方案能夠保证并机的动态及稳态指标,具有较强的适应性,确保逆变器之间良好的均流度。此外,该设计简单,克服了传统方式数据计算复杂的缺陷。
参 考 文 献:
[1] NUTKANI I U, LOH P C, WANG Peng, et al. Costprioritized droop schemes for autonomous AC microgrids[J]. IEEE Transactions on Power Electronics, 2015, 30(2): 1109.
[2] WU Dan, TANG Fen, DRAGICEVIC T, et al. A control architecture to coordinate renewable energy sources and energy storage systems in islanded microgrids[J]. IEEE Transactions on Smart Grid, 2015,6(3):1156.
[3] BOJOI R I, LIMONGI L R,ROIU D, et al. Enhanced power quality control strategy for singlephase inverters in distributed generation systems[J]. IEEE Transactions on Power Electronics, 2011, 26(3):798.
[4] ORFANOUDAKIS G I, YURATICH M A, SHARKH S M. Hybrid modulation strategies for eliminating lowfrequency neutralpoint voltage oscillations in the neutralpointclamped converter[J]. IEEE Transactions on Power Electronics, 2013, 28(8): 3653.
[5] JIAO Yang, LEE F C, LU Sizhao. Space vector modulation for threelevel NPC converter with neutral point voltage balance and switching loss reduction[J]. IEEE Transactions on Power Electronics, 2014, 29(10): 5579.
[6] NUTKANI I U, LOH P C, WANG Peng, et al. Decentralized economic dispatch scheme with online power reserve for microgrids[J]. IEEE Transactions on Smart Grid, 2017, 8(1):139.
[7] MAHMOOD H, MICHAELSON D, JIANG Jin. Accurate reactive power sharing in an islanded microgrid using adaptive virtual impedances[J]. IEEE Transactions on Power Electronics, 2015, 30(3): 1605.
[8] HAN Hua, LIU Yao, SUN Yao, et al. An improved droop control strategy for reactive power sharing in islanded microgrid[J]. IEEE Transactions on Power Electronics, 2015, 30(6):3133.
[9] CHEN T P. Zerosequence circulating current reduction method for parallel HEPWM inverters between AC bus and DC bus[J]. IEEE Transactions on Industrial Electronics, 2012, 59(1):290.
[10] HOU C C.A multicarrier PWM for parallel threephase active frontend converters[J]. IEEE Transactions on Power Electronics, 2013, 28(6): 2753.
[11] ELRAYYAH A, SOZER Y, ELBULUK M E. Modeling and control design of microgridconnected PVbased sources[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2014,2(4):907.
[12] 许德志, 汪飛, 阮毅, 等. 多逆变器并网系统输出阻抗建模与谐波交互[J]. 电机与控制学报, 2014, 18(2):1.
XU Dezhi, WANG Fei, RUAN Yi, et al. Output impedance modeling and harmonic interactions of multiple inverters gridconnected system[J]. Electric Machines and Control, 2014, 18(2):1.
[13] 易桂平, 刘悦, 胡仁杰. 分布式电源并联运行控制新方法[J].电机与控制学报, 2016, 20(3):109.
YI Guiping, LIU Yue, HU Renjie. New control strategy on paralleled operation of distributed generation [J]. Electric Machines and Control, 2016, 20(3):109.
[14] 阳同光.电网不平衡情况下基于神经网络并网逆变器同步技术研究[J].电机与控制学报, 2017, 21(6): 66.
YANG Tongguang. Research on grid synchronization of gridconnected inverter based on neural network under unbalanced voltage conditions[J]. Electric Machines and Control, 2017, 21(6):66.
[15] 何国锋,徐德鸿. 基于有源阻尼的多逆变器并网谐振抑制[J]. 电机与控制学报, 2017, 21(10): 62.
HE Guofeng, XU Dehong. Resonance suppression for gridconnected multiinverter based on active damping method[J]. Electric Machines and Control, 2017, 21(10): 62.
(编辑:邱赫男)
