通过式人体安检门自动测试系统的设计与研究
2019-07-30公安部第一研究所郑海东姜玲玲吴建义
■文/公安部第一研究所 郑海东 姜玲玲 吴建义
关键字:金属探测门 自动测试系统 PLC 伺服控制 三自由度运动平台 人机交互
1 引言
新版国标GB 15210《通过式金属探测门通用技术规范》的技术指标和试验方法有较大调整,标准中明确要求了精确且繁琐的测试工作,只有使用自动测试系统才能达到传统测试很难达到的精确性和重复性。美国NIJ标准也配套了自动测试系统,美国的Alpha Omega,General Dynamics公司都开发了用于安检门检测的自动测试系统。因此,急需能够代替目前采用标准测试人携带测试物或手持非金属夹具进行测试的自动测试系统,检测人员只需操作软件就使测试物按照规定的速度和位置通过安检门,并自动记录检测结果。
本文介绍了满足自动化测试要求的控制系统,采用欧姆龙PLC为核心控制器,应用脉冲模式,完成对伺服电机的运动控制,使测试人员从重复的人工操作中解放出来,并且极大地提高了定位和运动精度,从而提高了检测的准确性。
2 测试系统总体架构
安检门自动化综合测试系统主要由PLC、上位机、伺服电机、线性模组、限位开关、工业摄像头等组成,测试系统总体架构如图1所示。测试系统的核心执行机构为三自由度运动系统,由X/Y/Z方向的线性模组和伺服电机组成,三轴均采用同步轮带动皮带的驱动方式。Z轴方向为竖直方向;X轴方向为水平方向,与安检门平行;Y轴方向与安检门垂直,穿过安检门的检测区域。本测试系统可实现手动模式和自动模式的选择,能够自动完成国标等标准规定的测试全流程,并自动记录光报警信号,生成测试记录。

图1 系统总体架构
3 测试系统结构设计
本测试系统的机械结构如图2所示,主要由以下模块构成:基座、Z轴组件、X轴组件、Y轴组件、夹具组件、控制柜、摄像头、PC机。其中,基座为钢材制作,保证了测试系统的重心稳定。

图2 测试系统结构图
本测试系统的设计难点为:根据国标要求,距离安检门1.5m范围内除了测试物不能有任何金属材料。因此,要求Y轴组件,靠近安检门1.5m范围内的零部件全部由非金属材料制作而成。如图3所示,Y轴组件采用悬臂结构,由3m长的探测臂为主体穿过安检门的检测区域。为了增加悬臂结构的稳定性,设计了拉杆增加Y轴组件的刚度,大大减小了探测臂末端在移动过程中的振动,提高了系统的稳定性。拉杆与两端的拉杆端头采用螺纹连接,可以调节拉杆的拉力,克服了探测臂因自重导致的尾端下沉的现象,使探测臂保持水平,保证了系统的位置精度。Y轴组件采用同步轮带动皮带的驱动方式,后端由电机驱动同步轮,前端设计有同步轮组件,皮带上固定有滑车组件,沿探测臂内壁滑行,滑车组件上固定有夹具组件,滑车组件和夹具组件的结构如图4所示。其中,为满足国标对测试物多种位姿的要求,夹具组件具有一个旋转自由度,夹具组件的两个平面上贴有魔术贴,测试物与夹具之间通过魔术贴相互粘接,避免了金属材料的使用,同时,在测试过程中测试物不会掉落,保证了连接强度。
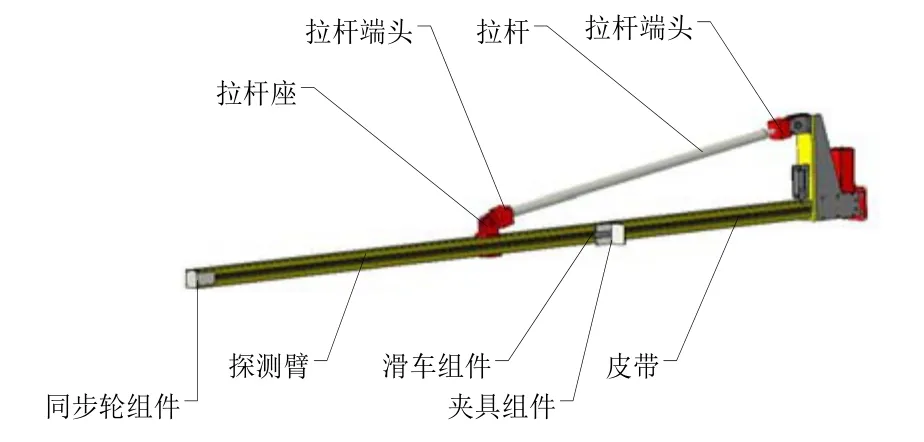
图3 Y轴组件结构图

图4 滑车组件、夹具组件结构图
Y轴组件前端主要包括探测臂、拉杆、拉杆端头、拉杆座、螺栓、螺母、夹具组件、滑车组件、魔术贴、皮带、同步轮组件等,均由非金属材料制作而成,使用的材料包括ABS、尼龙、PE、POM、PP、布料、氯丁橡胶、玻璃纤维等。
本测试系统的核心执行机构由伺服电机驱动线性模组实现,伺服电机的诸多参数都能影响整个工作过程的精度与效率,因此伺服电机的选择就显得尤为重要。转动惯量计算及电机选型的计算公式如下:
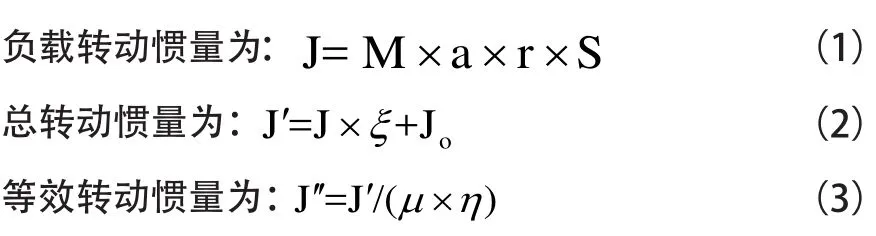
式中,M为负载重量,a为加速度,r为同步轮半径,S 为安全系数,ξ为不确定系数,+Jo为线性模组无负载惯量,µ为减速机减速比,η为减速机传动效率。
根据上述计算公式计算出各个轴的等效转动惯量,再查询伺服电机的额定转矩列表,选择合适的电机即可。本测试系统三轴均使用施耐德Lexium 23D系列伺服驱动器和BCH系列伺服电机,Y轴选用0.1kw伺服电机BCH0401,X轴选用0.2kw伺服电机BCH0601,Z轴选用0.75kw伺服电机带抱闸BCH0802。

图5 测试系统的工作流程
4 测试系统工作流程
本测试系统的工作流程如图5所示。详细内容如下:
(1)系统上电后,对各个端口进行初始化,包括限位开关的电平状态,原点开关的电平状态等。
(2)打开上位机软件,自动检测电机的位置,执行原点回位程序,等待就绪。
(3)在上位机软件中设定相关参数,选择相关测试标准,启用自动识别报警,测试数据可存储等功能。
(4)点击开始自动测试,上位机向PLC发送设定参数,再由PLC给伺服驱动器发送脉冲,控制三轴做相应的移动;当软件提示“是否换一种姿态继续测试”时,根据实际进展更换测试物姿态,完成全部测试。
(5)当软件提示“是否保存本次测试数据”,点击“是”将测试数据存入数据库文件,任务结束。
5 测试系统硬件组成

图6 PLC和电机的I/O分配图
本测试系统采用PLC作为控制核心,选用了欧姆龙SYSMAC CP 系列PLC控制器,采用施耐德Lexium 23D系列伺服驱动器和BCH系列伺服电机,并采用位置控制模式,将接收的脉冲信号和方向信号转换为角位移以及转动方向,从而驱动伺服电机以指定速度移动到指定位置。通过改变脉冲的数量可以改变位置行程,通过改变脉冲的占空比可以改变电机的角速度,实现无级变速;通过改变脉冲方向可以实现电机的正反转控制。本系统的PLC和电机的I/O分配如图6所示。
6 PLC程序设计
采用PLC 开发软件CX-programmer进行程序设计,该软件提供了灵活的编程方式(梯形图、功能框图、语句表)和丰富的指令集,可以简单快速地完成复杂的功能。根据测试系统的工作流程,分为初始化程序、运动控制程序2 个模块。各模块程序单独编写,结构简单,思路清晰,便于调试和修改。
(1)初始化程序。在初始化程序中,设置各轴的初始位置、限位开关和原点开关的初始状态。启用和初始化运动轴:每次运行自动模式时,加载组态,需要设置使能端、完成状态标识、运动轴的当前速度标识、位置标识以及方向标识。
(2)运动控制程序。1)原点回位:原点归零是通过限位开关和伺服电机的编码器共同作用来实现的, X/Y/Z三轴同时寻原点的控制程序,在上位机软件初始化完成后,自动运行。2)三轴运动控制:在自动运行模式下,X/Y/Z三轴同时启动,X/Z轴的运动速度始终为固定值,Y轴的速度由PC上位机发送的指令决定,三轴的位移由PC上位机发送的指令为依据,写入相应的寄存器,以脉冲频率和方向信号的形式发送给伺服驱动器,驱动伺服电机运动指定行程。同时,还有三轴运动停止的指令,在上位机软件中按下停止按钮后,三轴立即停止运动。3)上位机通讯:由于本系统的测试工作存在大量的重复性动作,因此PLC程序还需要在单次测试(Y轴组件的夹具携带测试物通过安检门并返回原点)完成后将三轴的电机启动、停止,原点确定,脉冲输出完成等状态回传给PC上位机,用于PC上位机发送下一次执行指令的判断依据。
7 PC上位机软件功能
PC上位机与PLC采用串口通讯,HOST LINK通讯协议(FINS模式), 与摄像头采用USB电缆连接。PC上位机向PLC发送设定参数,再由PLC给伺服驱动器发送脉冲,控制三轴做相应的移动;摄像头采集安检门的报警灯亮灯图像并进行处理后传给PC上位机进行统计。
PC上位机软件界面如图7所示,可以设置的参数主要包括:

图7 系统软件界面
(1)检测位置:根据国标GB15210附录B的12个测试位置设定,可根据需要勾选测试点;
(2)检测速度:自动测试时,匹配标准的三个速度;
(3)测试方式:
自动:可根据选择的测试标准对12个标准测试位置进行多位置、多速度连续测试,可启用自动识别报警,测试数据可存储;
手动:测试位置、速度、测试物、检测姿态、扫描间隔、检测次数、位置补偿等参数可自定义;
(4)自动测试标准:自动测试方式时可选择国标、航标、自定义,选择后将自动匹配对应的检测速度和测试物;
(5)测试物:自动测试时,根据所选标准,自动列出对应的测试物;
(6)手动测试:手动测试方式时,速度可在0.1m/s-2m/s其间设置(精度0.1m/s);位置可在X轴范围(-40,40),Z轴范围(0,210)之间设置。
8 测试结果
按照测试系统的结构及框架,完成整机的安装,完成PLC 与各轴驱动器的连接及其它电缆的连接。
经多次调试,本测试系统在空载状态下穿过安检门时安检门无报警,证明了测试系统对金属探测门的测试工作无干扰,能够满足测试安检门的基本条件。本测试系统能在X、Y、Z 等3个方向做精确的点位运动,携带测试物按指定位置、速度和姿态通过安检门,并且能够通过摄像头自动记录安检门的报警灯报警情况,自动生成测试记录表单。本测试系统运动性能指标如表1 所示。

表1 运动性能指标
测试完成后,本测试系统还可以在上位机软件中点击“导出”按键,弹出“数据导出”对话框,生成excel格式的测试表单,测试表单记录了测试过程所采用的测试物名称、姿态、测试速度、测试位置信息,表格内容为测试过程的报警次数,未报警时为0,未测试时为空,如图8所示。
针对市场上某款安检门,本表单对应的自动测试方案为:12个位置点,4种测试物,3种姿态,3种速度,共计432种测试参数,每种测试参数进行10次重复测试,共计4320次测试。其中四种测试物分别为:
(2)国标-T4-1:模拟螺丝刀,材料:工具钢(45#);
3种姿态分别为:横、竖、纵;3种速度分别为:0.2m/s,1 m/s,2 m/s。

图8 测试表单
测试结果分析:根据新版国标的探测灵敏度实验方法和要求,以上四种探测物在每一个位置的探测率分布曲线如图9所示。由图可知,该安检门对国标-T6-1(III类)在每个位置的探测率均为100%,达到了新版国标要求的90%以上的探测率;对国标-T4-2(II类)、国标-T4-1(II类)在某些位置存在漏报的情况,但探测率均大于90%;而对国标-T2(I类)仅在中部两个位置有几次报警,其他位置均未报警,最高的探测率为60%。
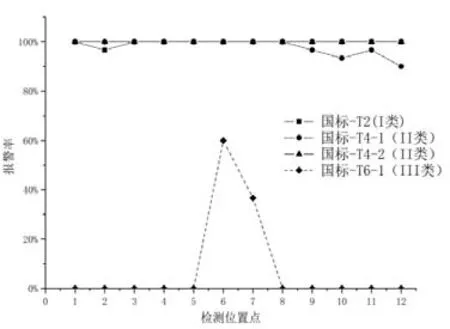
图9 某安检门对四种探测物的灵敏度探测率分布曲线
根据新版国标的通行速度实验方法和要求,以上四种探测物的总探测率如图10所示。由图可知,该安检门对国标-T6-1(III类)、国标-T4-2(II类)、国标-T4-1(II类)的总探测率均达到了新版国标要求的90%以上;而对国标-T2(I类)的探测率为0%,未报警。
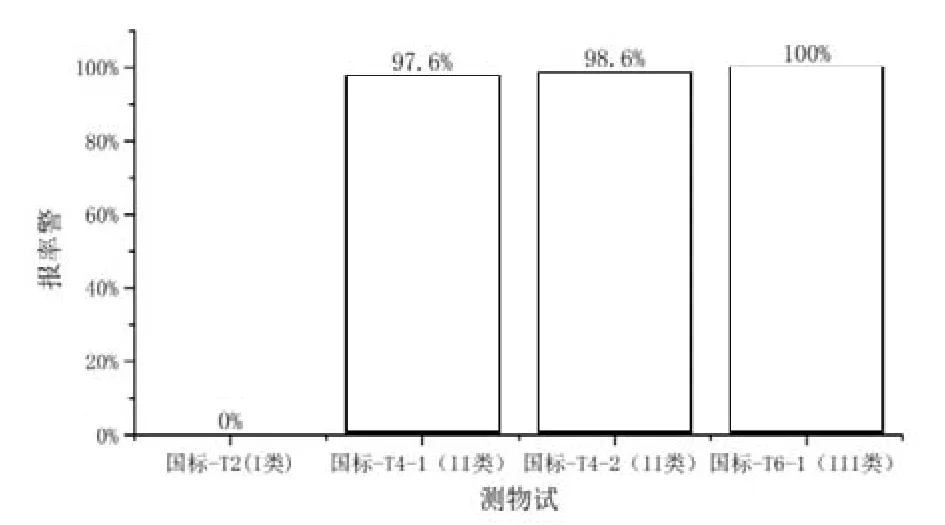
图10 某安检门对四种探测物的通行速度总探测率
由此判断,该安检门能够探测到II类和III类的某些探测物,属于混合类安检门(非完整测试,仅供表征自动测试系统的测试能力)。同时,该自动测试方案需要人工完成的工作是更换4次测试物,每个测试物在12个位置点调整3次姿态,其余测试工作均由本测试系统自动完成,整个测试过程耗时10小时,大大节省了测试人员的时间和精力。
9 结语
本文采用现代工业控制主流产品进行了系统集成,基于PLC与运动控制模块构建了通过式人体安检门自动化综合测试系统,并通过实际的测试,证明了该系统具有良好的测试能力和定位精度,提高了检测的准确性,大大减轻了测试人员的工作强度。在安检门测试领域进行了有益的探索,具有良好的实际应用意义,系统工作的高效性、稳定性、安全性得到了保证,并且提供了友好的人机交互界面,受到了行业人员的一致好评。
