ROV在深埋长隧洞水下检查中的应用
2019-07-29
(四川中水成勘院工程物探检测有限公司, 成都 610072)
1 研究背景
自20世纪50年代以来,我国水电站地下厂房建设发展迅速。至2015年底我国已建成120余座地下式水电站,其中装机容量超过1 000 MW的地下式水电站40余座,且主厂房跨度超过25 m的超大地下洞室群电站有27座[1]。
从水力学角度上看,我国高坝建设普遍存在高水头、大流量、窄河谷的技术特点,穿越高地应力区、工程地质环境恶劣的深埋长隧洞工程不断涌现,在投入生产运营后的长期运行安全问题日益凸显[2]。
目前水下无损检测方法主要为光学检测,包括潜水员水下目视、水下摄影、水下录像等。这些检测方法面临诸多难题,如:水下环境复杂多变,对潜水员生命安全威胁较大;作业时间短,下潜深度不宜超过50 m;潜水员一般都是非水利专业背景出身,难以满足专业探测需求且成本较高等。近20 a来水下机器人在军事及民用领域均有了长足的发展[3]。单宇翥[4]将水下机器人应用于三峡水利枢纽导流底孔封堵检修门水下清理工作中,效果明显;李福年等[5]将ROV作为一种新型实用的水下作业工具,应用于阿海水电站大坝水下、闸门槽、流道等检查中并取得显著成效。郑发顺[6]归纳了遥控水下机器人系统在水库大坝水下检查中的应用成果与技术优势,特别是对应用中存在的易缠绕及难以发现大坝渗漏点等问题作了经验总结。
本文详细阐述了ROV在引水隧洞及尾水隧洞等深埋长隧洞水下检查中的应用效果,总结该方面的应用经验及教训,为ROV系统在深埋长隧洞水下检查中的应用积累了实践经验,为类似工程检查提供参考。
2 ROV系统
ROV是一种通过缆索或胶带将通讯和动力系统与水上控制系统相连,并由水面人员远程操作,完成特定水下作业任务的无人水下载运器。
ROV系统由ROV主机、绞盘及控制管理系统、控制台等共3部分组成。ROV主机是水下摄像头、各种探测或检测传感器、水下作业工具等设备的运动平台;绞盘及控制管理系统通过绞盘上的脐带缆将水面的动力和控制命令下传给ROV主机,将获得的视频、声呐以及其他传感器数据上传给地面控制台;地面控制台则可控制ROV主机的运动、照明,对搭载的传感器进行控制、调节,并显示或记录相应的观测数据或水下图像。
ROV系统集水下摄像、声呐扫描成像、水下定位(含定深、定向)和简易水下作业等功能于一体,具有小巧灵活、操作简易、搭载功能强大等特点,能够在低能见度、水质差、流态不稳等复杂水域环境下实施水下作业,能够准确检查结构裂缝和结构缺损,并能快速查明水下地貌,可用于水下大面积大深度搜索与隐患排查[7-10]。
3 工程概况
3.1 工程设计
3.1.1 引水隧洞概况
某电站进水口为岸塔式,位于大坝上游约100 m处的左岸山坡由直径为9 m的6条引水隧洞平行布置,进水口平台高程为1 207 m,依次设置拦污栅、检修闸门、快速闸门及相应启闭设备。电站引水隧洞由渐变段、上平段、上弯段(半径R=30 m)、竖井段(高70 m)、下弯段(R=30 m)、下平段等组成。引水隧洞上平段底板高程1 128 m,下平段底板高程998 m,最大水深超200 m。隧洞衬砌采用2种型式,进口渐变段至竖井段末端为钢筋混凝土衬砌结构(渐变段衬砌厚度为1.5 m,其他为0.8 m);下弯段起点至下平段为双层衬砌结构,表层为钢衬,内层回填混凝土。
3.1.2 尾水调压室及尾水隧洞概况
尾水调压室为简单长廊式,与主厂房平行布置,开挖尺寸为203 m×19.8 m×9.8 m(长×宽×高)。1 033.86 m高程以下分为2室,中间由宽17.2 m的岩墙隔开。1#—3#机组共用1#调压室,尺寸为90.5 m×17.5 m,底板高程980.8 m; 4#—6#机组共用2#调压室,底板高程990.0 m。
1#,2#尾水隧洞分别接1#,2#尾水调压室。1#尾水隧洞为有压洞,长867.66 m,钢筋混凝土衬砌厚度顶拱0.6 m,两边墙1.5 m,底板0.5 m。城门洞型断面尺寸为16.5 m×16.5 m(宽×高)。2#尾水隧洞全长580.60 m,其中前段215.08 m断面型式、尺寸及衬砌厚度同1#尾水隧洞;后段365.52 m城门洞型断面尺寸为17.5 m×23 m(宽×高)。
3.2 检查目的
该电站运行10 a有余,为全面掌握引水及尾水建筑物结构现状,分析评价其运行状态,确保电站运行安全和发电机组安全稳定运行,特开展此次检查。
3.3 检查重点内容
引水隧洞检查范围为全覆盖检查,检查最大水深约200 m。每条引水隧洞包括从流道渐变段起点开始的渐变段、上平段、上弯段、竖井段、下弯段。重点检查内容包括:引水隧洞混凝土内表面有无破损、剥落、露筋、开裂、裂缝、冲蚀等缺陷,内表面附着物情况,底板磨损情况,混凝土衬砌结构与钢衬结合部位完好性,钢衬完整性等。
对尾水调压室底板和边墙水下部分进行全覆盖扫描,对尾水隧洞的全洞段进行全覆盖扫描。重点检查内容包括:混凝土内表面有无破损、剥落、露筋、开裂、裂缝、冲蚀等缺陷,内表面附着物情况,底板磨损情况,结合部位完好性等。
3.4 检查难点分析
(1)引水隧洞进口为近直角形,水下机器人的脐带缆容易因摩擦造成表皮破损,引起设备短路、水下机器人难以回收等。
(2)当水下机器人进入较深部区域后,脐带缆由于水压不同而产生的浮力不同,重力较大后也会引起水下机器人拖动困难。
(3)多级梯形的隧洞结构增加了脐带缆与引水隧洞内壁的接触面积,造成整体摩擦力较大,引起水下机器人前进和回收困难。
(4)水下机器人的定位问题。
4 ROV选型
引水隧洞水下检查:ROV主机需从检修闸门进入引水隧洞,再经上弯段和下弯段,共计3处转弯后进入下平段。尾调室及尾水隧洞水下检查:ROV主机需从尾水调压室进入尾水隧洞,要求脐带缆长度超900 m。
针对深埋长隧道水下检查工作的难点,经过反复试验对比,做出如下ROV选型:①设计采用新型脐带缆,减小表层阻力,提高抗拉性能及浮力;②增加主机动力,确保拖动脐带缆前进;③采用吸附洞壁的爬行机器人,增大其拖动电缆能力;④在进口段特制脐带缆整理装置(TMS),见图1,通过钢缆垂直吊放到竖井直角弯所对应的工作水深,然后遥控水下机器人进入引水隧洞完成检查作业;⑤在脐带缆上间隔一定距离做好标记并配备水深感应器,根据标记、水深及设计图纸现场记录,进行水下机器人主机定位。

图1 脐带缆整理装置Fig.1 Transportation management system forumbilical cable
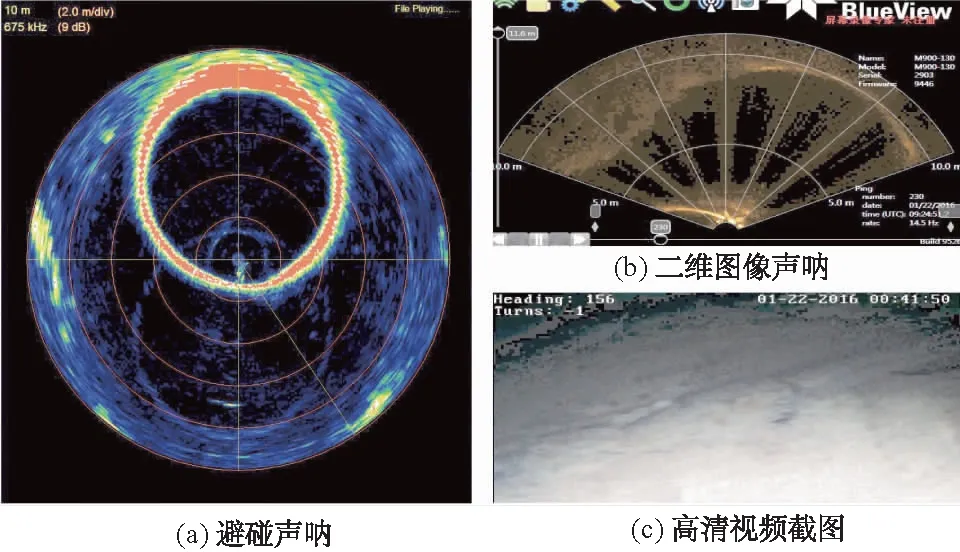
图2 钢衬进口与混凝土接触部位检测成果Fig.2 Inspection results of the contact betweensteel lining and concrete
5 典型检测成果分析
5.1 引水隧洞典型检测成果分析
钢衬进口与混凝土接触部位水下检测成果见图2。由图2可见:
(1)避碰声呐显示,ROV位于引水隧洞底部区域,洞室截面回波整体呈圆形,未见明显缺陷。
(2)图像声呐显示,ROV前部区域(10 m量程近距离范围之内)无明显回波异常,未见缺陷异常区域。
(3)高清视频截图显示,钢衬进口与混凝土接触部位局部凹凸不平整,但整体接触紧密、光滑,无明显冲蚀破坏缺陷。
5.2 尾水隧洞典型检测成果分析
5.2.1 典型水下声呐检查成果分析
尾水隧洞底板典型水下声呐检查成果见图3。
由图3(a)可见:尾水洞城门洞进口区域,图像声呐回波反射显示边界规则、表面光滑、截面特征明显,与设计图纸一致性好;未见明显声呐回波反射异常区域,无明显冲蚀破坏缺陷;城门洞周围天然山体锚索的锚固头声呐回波反射清晰可见,呈规则排列,未见明显冲蚀破坏缺陷。
由图3(b)可见:尾水隧洞进口平直段底板整体平整光滑,未见明显声呐回波反射异常区域,无明显冲蚀破坏;2条结构缝清晰可见,垂直洞壁方向呈直线型,间隔8 m,与设计图纸吻合,未见其他裂隙发育;两侧边墙平直规则,未见明显回波反射异常区域,无明显冲蚀破坏;局部可见多次反射异常,在ROV前进过程中逐渐消失。
由图3(c)可见:尾水隧洞环形段底板整体平整光滑,未见明显声呐回波反射异常区域,无明显冲蚀破坏;1条结构缝清晰可见,垂直洞壁方向呈直线型,未见其他裂隙发育;两侧边墙呈弧状,未见明显回波反射异常区域,无明显冲蚀破坏。环形段整体与设计图纸吻合,未见明显冲蚀破坏区域。
由图3(d)可见:在0+240 m底板靠近左侧边墙的区域,水下声呐成像探测发现一处高强度反射异常区域,反射异常呈长方形状,经声呐信息测量,长约3.5 m,宽约0.5 m;同时,对该异常区域,采取高清视频水下验证。
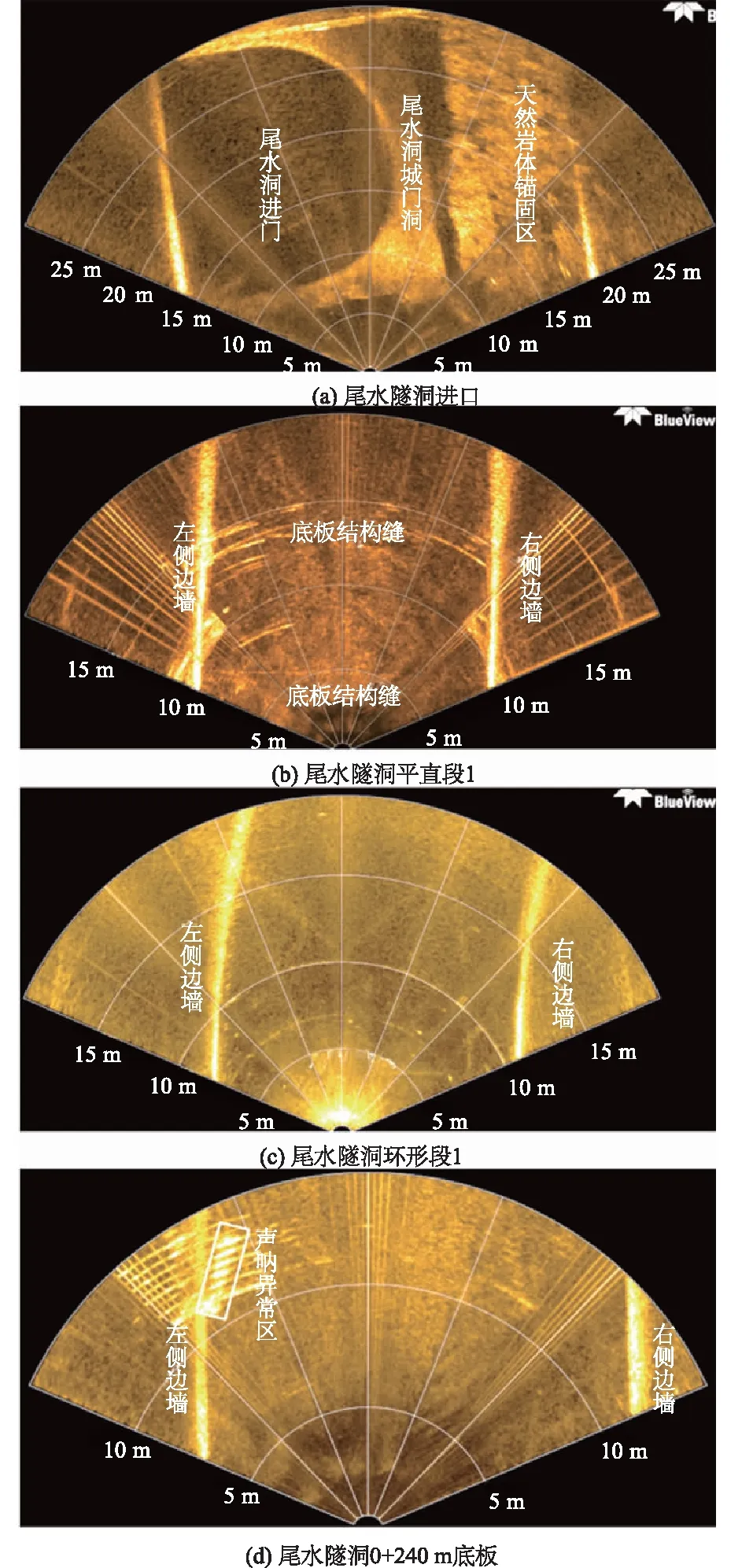
图3 尾水隧洞底板典型水下声呐检查成果Fig.3 Typical inspection results of tailrace floor byunderwater sonar
5.2.2 典型水下视频检查成果分析
尾水隧洞底板水下光学视频局部精细检查典型成果见图4。
由图4(a)可见:底板混凝土结构缝清晰,无明显凹陷冲蚀,结构缝两侧底板混凝土整体平整;由图4(b)可见:底板与左侧边墙交界区域有顺洞室方向的钢筋构件,底板与边墙混凝土整体平整;由图4(c)可见:底板混凝土存在小孔,孔内有疑似电线芯装铁丝,孔周边区域底板混凝土整体平整。
对底板与边墙交界区域的异物进行统计,累计观测到洞内异物236件,见统计表1。由表1可见,异物主要由钢筋组成,占比约90%。
对桩号0+240 m底板处声呐探测异常区进行视频精细检查,从洞口两端向中间分别进行了2次 视频检查,检查成果见图5。根据光学视频检查的整体分析总结,判断该构件为用于锁定闸门的锁定梁。
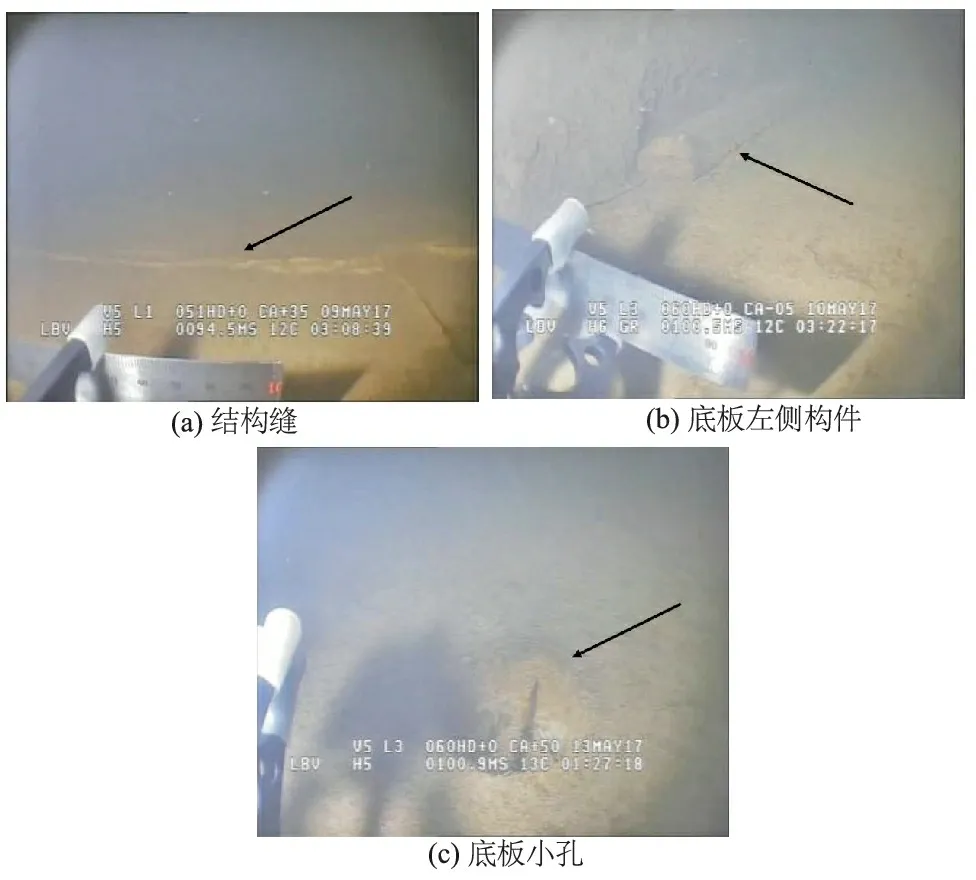
图4 尾水隧洞底板典型水下光学视频检查成果
Fig.4 Typical inspection result of tailrace floor byunderwater optical video
表1 尾水隧洞底板与边墙交界区域的异物统计
Table 1 Statistics of detected foreign objects in the borderarea between the bottom and side wall of tailrace
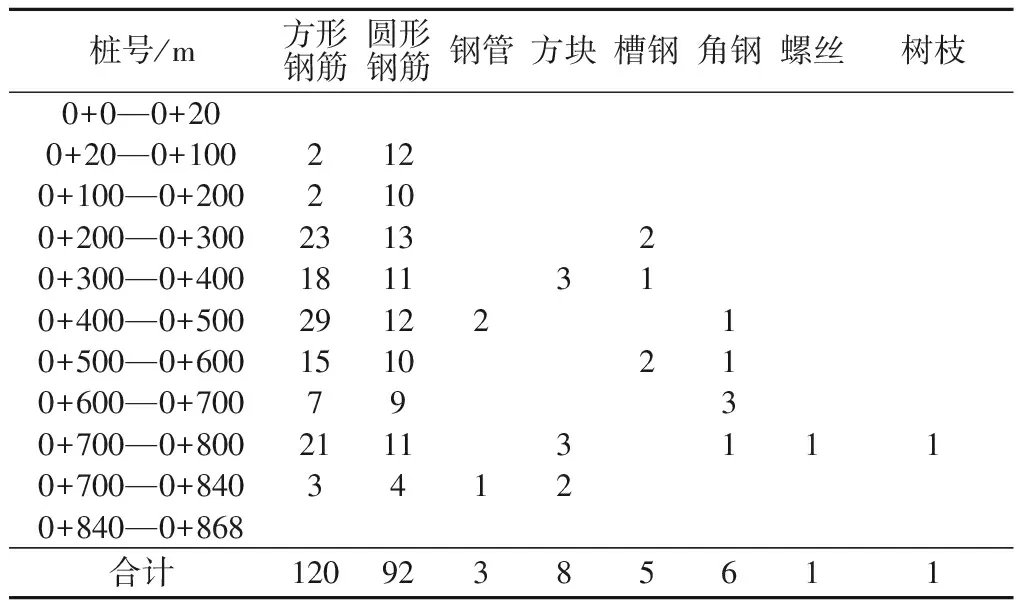
桩号/m方形钢筋圆形钢筋钢管方块槽钢角钢螺丝树枝0+0—0+200+20—0+1002120+100—0+2002100+200—0+300231320+300—0+4001811310+400—0+5002912210+500—0+6001510210+600—0+7007930+700—0+800211131110+700—0+84034120+840—0+868合计12092385611
注:表中统计数据单位为件
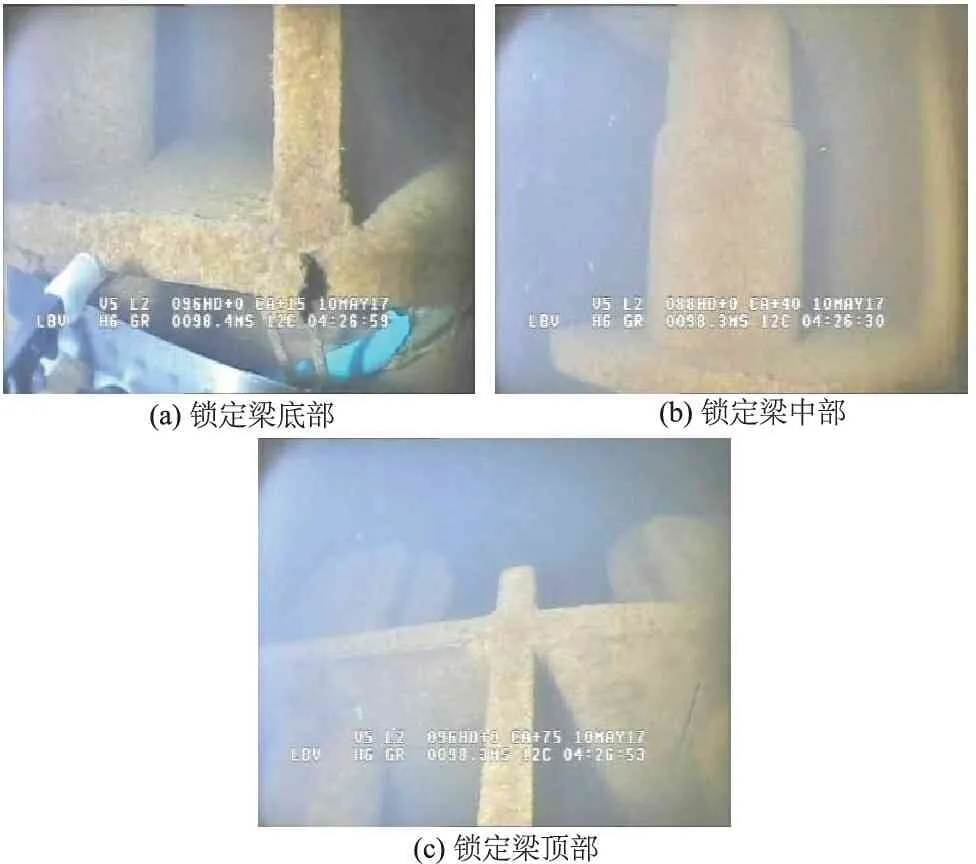
图5 尾水隧洞0+240 m底板水下光学视频检查成果
Fig.5 Inspection results of the 0+240 m tailrace floorby underwater optical video
5.3 小 结
水下机器人检查成果表明:水下检查区域无明显缺陷和异常现象,运行良好;所发现的钢筋、钢管等少量残留异物及混凝土表面局部不平整、轻微麻面等现象不影响整体安全和稳定运行,可以不进行处理。
6 结 论
将ROV系统初步应用于某水电站深埋长隧道水下检查,取得了较好的检查效果,为其运行状况和冲蚀磨损情况提供了详实的检测成果,并为检修维护方案的制定提供了有力的依据。应用特征总结如下:
(1)对于复杂结构的深埋长隧道进行水下检查,可采用ROV系统搭载避碰声呐系统、图像声呐系统、水深感应系统、高清视频系统。
(2)针对深埋长隧道,需要设计采用新型脐带缆,减小表层阻力,提高抗拉性能及浮力,并增加主机动力,确保拖动脐带缆前进。
(3)在转弯段,特制脐带缆整理装置(TMS),可有效减小隧道转弯处的摩擦力,减小ROV前进阻力并保护脐带缆。
(4)采用避碰声呐及水深感应装置,并在脐带缆上进行长度标记,根据设计图纸进行定位。
(5)采用图像声呐进行普查和采用高清视频系统进行详查相结合。
(6)图像声呐系统对水下建筑物整体结构情况反映明显,但对结构细节反映不明显。高清视频系统对于局部结构精细情况采集数据清晰,但难以检查整体结构。
