基于TDOA定位模型的Chan井下定位算法的改进
2019-07-25靳伟超马翠红杨友良
靳伟超 马翠红 杨友良

摘 要:针对因环境复杂多变,非视距及多径效应影响而导致井下定位精度低的问题,采用带宽宽,时间分辨率高,穿透能力强的UWB技术,基于到达时间差(TDOA)的定位方案,提出了一种Chan-UKF定位算法。即将Chan算法取得的位置估计值作为UKF算法的初始值,对位置初估计进行二次估计。通过Matlab仿真平台,在TDOA的测距误差标准差σ≤10 cm的情况下,Chan-UKF算法能将二维平面定位的均方根误差减小约50%。仿真结果显示,Chan-UKF定位算法稳定性较好,能够有效降低定位误差,提高定位系统的精度。
关键词:井下定位;TDOA定位模型;Chan算法;无迹卡尔曼滤波
中图分类号:TP271.5;TN409文献标识码:A文章编号:2095-1302(2019)01-00-04
0 引 言
为防止矿井事故的发生,国家安全生产监督管理总局于2010年颁布了《国务院关于进一步加强企业安全生产工作的通知》,要求各类矿山要严格制定和实施生产技术装备标准。其中包括装备使用矿井人员定位系统[1]。因脉冲超宽带(IR-UWB)抗信道衰减性低,频带资源丰富穿透能力强,时间分辨率高,抗多径效应明显等优势成为了井下定位技术的研究热点[2]。
矿井无线电信号传输受巷道分支、弯曲、倾斜、断面面积和形状、围岩介质、巷道表面粗糙度、支护、纵向导体(电缆、铁轨、水管等)、横向导体(工字钢支护等)设备等影响,信道环境复杂多变,多径效应及NLOS明显[2],对于基于观测信号到达角度(AOA)及接收检测信号强度(RSSI)的定位方法不适用于矿井人员的精确定位。
信号到达时间(TOA)、信号到达时间差(TDOA)充分利用了超宽带带宽和超高时间分辨率的特点,定位精度与信号发射设备与接收设备之间信号传输时间有关,受巷道等外部环境影响小,因此适合用于矿井人员精确定位[3]。TOA原理是在移动标签与固定基站及固定基站间的时钟精确同步的前提下,测量标签发射信号到达基站的时间信息,乘以光速c获得距离信息,进而完成标签的位置估计。而TDOA则是通过测量移动标签到两个不同固定基站的时间差值,乘以光速c得到固定距离差值,并根据标签到两个基站的距離差建立双曲线方程,之后凭借多基站建立双曲线方程组求解获得标签的位置信息。固定基站与移动标签的时间同步,降低了系统的测距误差,因此被广泛应用于室内定位。
1 TDOA定位模型
TDOA又称作双曲线定位方案[4]。根据双曲线的数学原理,以两个已知位置坐标的固定UWB基站作为焦点,以两者间的距离差为长轴做一条双曲线,同理用另外一个固定基站也可做出双曲线。两曲线的交叉点为标签坐标位置。设移动标签的位置坐标为(x,y),空间内设N(N≥3)个固定基站,坐标为Pi(xi,yi),i=1,2,…,N。选取1号基站为主基站,其他基站与主基站进行相关运算得到TDOA值。
2 Chan算法
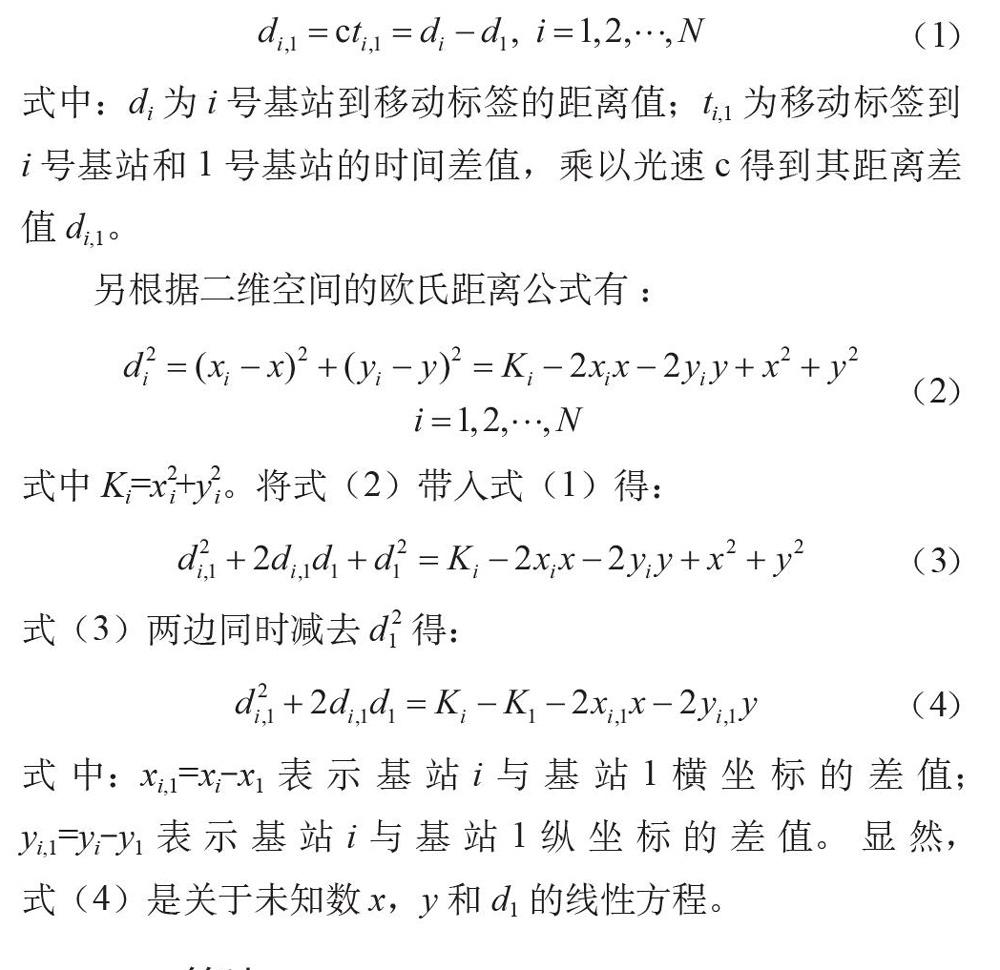
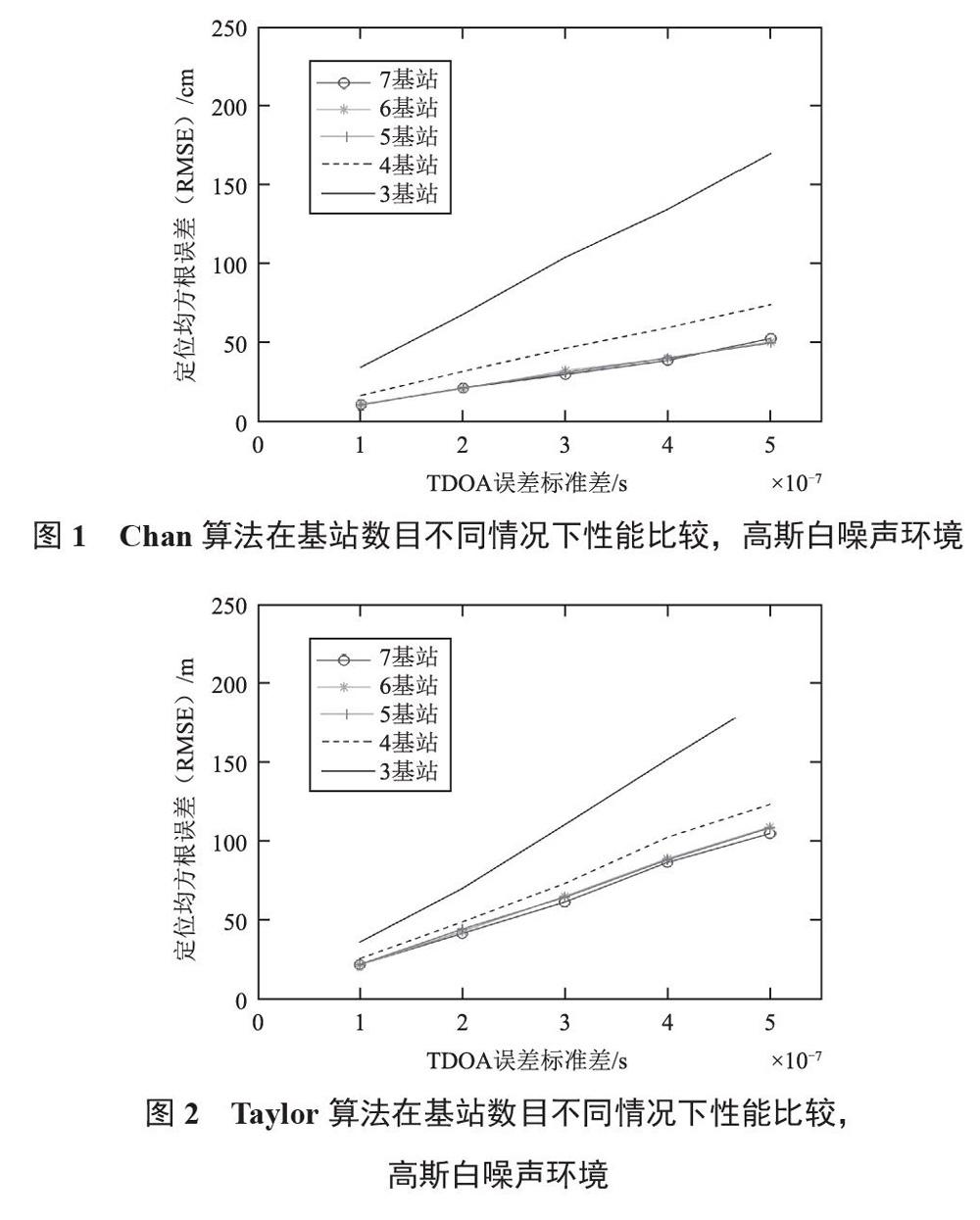
TDOA的定位难点在于非线性方程组的求解转化为非线性优化最优估计的问题,需要无错测距信息,但高斯白噪声产生的测距误差会导致非理想的定位估计。将Chan算法作为依据TDOA测量值的典型误差校正方法。进行两次最小二乘估计代替对双曲线方程组的求解,计算量小。在服从零均值高斯分布误差的前提下精度高,满足工程实际要求。但在NLOS环境下定位性能明显下降[5]。
(1)只有三个固定基站接收到标签信号时
3 无迹卡尔曼滤波算法
UKF滤波算法是对非线性函数概率密度分布的近似估计,用一组确定样本近似逼近状态的后验概率密度分布,而非像EKF滤波算法那样直接对非线性函数的线性化近似[6]。因此其不需要运算Jacobian矩阵偏导数,计算量小。因为UKF滤波没有忽略高次项,所以对非线性分布的统计如服从高斯分布的TDOA测量值的非线性方程组有较高的计算精度,相比于EKF滤波算法在稳定性和精度上都存在很大优势。在不同时刻k下,在添加具有高斯白噪声V(k)的观测值Z和高斯白噪声w(k)的随机变量X构成的非线性系统方程描述如式(10):
(1)获取一组Sigma点集及对应权值。
(2)计算2n+1个Sigma点集的一步预测,i=1,2,…,2n+1。
(3)计算系统状态量X的一步预测及协方差矩阵P。
(4)根据一步预测结果再次进行UT变换,产生一组新的Sigma点集。
(5)将步骤(4)产生的一组新Sigma点集代入观测方程,得到预测的观测值Z,i=1,2,…,2n+1。
(6)将步骤(5)由新Sigma点集得到观测预测方程结果,通过加权求和得到系统预测的均值和协方差。
(7)计算增益矩阵。
(8)计算系统状态更新X和协方差更新P。
为了更加直观地显示状态估计的准确性,将每个时刻的估计值与真实值作差,得到绝对值偏差,即:
4 Chan-UKF定位算法
Chan算法具有稳定性高、时间复杂度低的特点,UKF对不确定误差具有最佳估算能力。室内定位中,用Chan算法的输出作为UKF滤波的初始值,输出得到目标节点的位置,算法的整体流程如图6所示。
算法主要分为两大部分,即算法的初始化和目标节点位置的估计。Chan算法的初始化主要依据基站的布局对式(6)中的矩阵G进行初始化,UKF滤波器的初始化主要是对状态及协方差阵的初始化。完成后等待接收新数据,触发Chan算法对节点位置的初次估计,将输出的估计值作为UKF滤波器的观测状态,对节点位置作二次估计,从而得到更精确的节点位置。
为了分析得到Chan-UKF算法的定位性能,借助 Matlab 2014b仿真平台,仿真分析该算法的定位精度和稳定性。
Chan-UKF算法与Chan算法位置曲线如图7所示,可以看出,Chan-UKF算法的曲线比Chan算法更加接近真实曲线,表明Chan-UKF算法比Chan算法的定位精度高。Chan-UKF算法与Chan算法位置估计误差曲线如图5 结 语
基于UWB无线定位在井下复杂多变环境中的运用,本文提出Chan-UKF定位算法。该算法联合Chan算法和UKF滤波算法,用Chan算法的位置估计值作为UKF滤波的初始值,满足稳定性和实时性的同时能够有效估计移动标签位置。实验结果表明,Chan-UKF算法降低约50%的定位误差,有效提高了定位精度。
参 考 文 献
[1]孙继平,杨大明,张志钰,等.煤矿井下安全避险“六大系统”建设指南[M].北京:煤炭工业出版社,2012.
[2]万群,郭贤生,陈章鑫.室内定位理论方法和应用[M].北京:电子工业出版社,2012.
[3]蒋恩松.礦井扩频测距定位方法研究[D].北京:中国矿业大学(北京),2017.
[4]肖竹,王勇超,田斌,等.超宽带定位研究与应用:回顾和展望[J].电子学报,2011,39(1):133-141.
[5] CHAN Y T,YAU C H,PAK-CHUNG C.Exact and approximate maximum likelihood localization algorithms[J].IEEE transactions on vehicular technology,2006,55(1):10-16.
[6]李静,刘琚.用卡尔曼滤波器消除TOA中NLOS误差的三种方法[J].通信学报,2005,26(1):130-135.
[7]孙哲星.基于时间测距的矿井人员定位方法研究[J].工矿自动化,2018,44(4):30-33.
[8]李仕云,邓洪权.基于EKF的双站测向/时差联合定位算法[J].无线电通信技术,2015,41(1):38-40.
[9] ZHANG J,DONG F,FENG G,et al. Analysis of the NLOS channel environment of TDOA multiple algorithms[C]// Sensors, IEEE,2016:1-4.
[10]唐路,李奇.基于UWB室内定位算法研究[J].工业控制计算机,2017,30(6):103-104.
