基于偏移量控制的MPC算法在预扭叶片振动控制中的应用
2019-07-24刘廷瑞
刘廷瑞, 常 林
(山东科技大学 机械电子工程学院过控系,山东 青岛 266590)
风力机叶片的气弹不稳定性是叶片断裂失效的重要原因,其中挥舞/摆振运动造成的失效是主要表现[1]。近期发生在世界各地的风力机叶片断裂失效也验证了这一问题[2],因此探寻叶片挥舞/摆振振动控制方法具有积极的意义。近年来诸多学者针对不同的叶片结构模型发展了诸多风力机叶片颤振抑制方法,其中2D典型截面模型由于高效方便,而又能集中分析典型的发散不稳定振动问题而被广泛采用。
典型截面模型早期由Chaviaropoulos提出并进行了气弹分析[3]。该模型建立在2D翼型截面基础上,通常通过分析挥舞/摆振、挥舞/扭转耦合位移来研究不同的气弹现象。文献[4]对典型截面的挥舞/摆振/扭转耦合运动进行了建模,并通过线性二次型控制及模糊控制策略研究了发散不稳定控制问题;文献[5]研究了大位移变形的经典颤振不稳定现象,并通过时域响应和频率结构分析研究了叶尖挥舞/摆振/扭转位移;而课题组成员也曾在前期工作中对2D叶片的气弹不稳定进行了智能PID控制策略的研究[1]。然而上述方案均未涉及到2D翼型截面的完整的结构阻尼的描述,其阻尼行为仅仅限于弦向和法向的阻尼(不完全阻尼)行为的集成,未考虑叶片弹性扭转或叶片预扭对阻尼变化的影响。
文献[6]考虑了弹性扭转及叶片预扭对复合材料振动行为的影响,但限于3D直升机叶片,且忽略了其中的结构阻尼。对于3D叶片体而言,复合材料叶片结构阻尼的计算是一个比较复杂的问题,至今尚无统一的计算方法。项目组成员在前期工作中,考虑弹性扭转及叶片预扭,计算了3D叶片体结构阻尼,发现结构阻尼的影响是至关重要的[7]。对于2D翼型截面而言,挥舞/摆振线位移方程中的结构阻尼的估算同样尚无定论,但文献[8]曾基于角位移方程估算了结构阻尼系数。本文在前期工作基础上,引入了缩减时间概念,进行了2D翼型线位移到角位移的变化,并结合文献[8]的阻尼计算方法,实现了基于完全结构阻尼的2D翼型角位移的结构建模。另外,线性二次型控制(LQR)经常用来对旋转体的发散不稳定性进行控制[9], 但由于其在初始振动幅度的抑制方面具有先天性的缺陷,在实际应用中,需加大控制量方能达到较为理想的效果。本文基于发散振动的不稳定性,采用了一种基于偏移量控制的模型预测控制(MPC)算法[10-12],并在LQR控制的加权值基础上创新性地构建了一种罚权值,来构建MPC算法的控制性能指标,不仅大幅度减小了控制量,而且使发散运动达到了急速收敛的目的。
1 理论建模
1.1 结构模型及运动方程
考虑大长径比2D翼型典型截面,截面位置距离叶根r处,如图1所示。y,z方向分别代表摆振和挥舞方向的运动(位移),且α为攻角;U为风速;c为弦长(弦向方向为t,法向方向为n);V0为相对风速;λ为速比系数;叶片展长L=15 m;转速为Ω=λU/L=2U/L。θ=(r/L)×θ0为预扭角。其它结构参数包括:ωt、ωn分别为弦向和法向频率;ξt、ξn分别为弦向和法向阻尼比;ρb为截面元密度。

图1 2D翼型典型截面位移坐标及参数
考察文献[1]的截面线位移模型,剔除其中的不完全阻尼行为,并令缩减时间τ=tV0/c,截面挥舞角βz=zc/r,截面摆振角βy=yc/r,则描述挥舞角/摆振角的运动方程可以表达为
(1)
式中,Cy、Cz分别为摆振和挥舞方向的气动系数。
本文利用叶片预扭角θ来增加扭转刚度,并为系统提供完全阻尼行为。根据文献[8]之推导,结构阻尼系数可以描述为
(2)
式中,T为预扭效应系数,Cs0为缩减的阻尼矩阵,分别写作
(3)
则完全结构阻尼系数矩阵可以表达为ΩCs。类似地,有相应的结构刚度系数
(4)
则完全刚度系数矩阵可以表达为
(5)
在此基础上可以获得新的运动方程如下
(6)
式中:CL、CD分别为气动升力系数和气动阻力系数。
1.2 模型参数计算
对于不同位置r处的截面,有着不同的弦长c和元密度ρb。文献[13]基于NA63215翼型,在叶素-动量理论的基础上,利用Wilson迭代法优化设计了不同的位置r处的弦长c。本文在此基础上,继续优化了元密度ρb,并将相关各个参数拟合为“六级正弦和(Sin 6)”曲线,表达为
(7)
式中:w=r/L;系数ai,bi,ci参见表1所示。
翼型气动系数CL、CD的准确性和完备性对叶片设计意义十分重大。本设计在文献[13]基础上,利用Xfoil软件及AirfoilPrep软件,获得了攻角α在-90°~90°范围内的升、阻气动系数CL、CD,同样将其拟合为Sin 6曲线,在Sin 6曲线中,w=α;相关系数ai、bi、ci亦参见表1。

表1 Sin 6模型中不同参数的系数

(8)
式中:Ac、Cc均为4×4系数矩阵,Bc为4×1系数矩阵。
2 MPC控制算法
根据处理对象的不同,MPC有诸多不同的算法,包括标准优化MPC(隐式MPC)、终端权值MPC、显式MPC,以及适用于非线性系统的自适应MPC和多重MPC[14]。本文在标准优化MPC的基础上,采用文献[12]的状态空间表达的MPC算法,并结合LQR控制中的加权矩阵系数,构建了基于罚权值和设定点跟踪的MPC偏移量控制算法,对叶片的发散行为进行了控制。
首先,对系统方程(8)进行离散化,得到:
(9)
式中:ηx、ηy为预测模型与实际模型之间的偏移量。
将上述方程写为增量形式
(10)
式中:I为单位矩阵。然后进一步定义新的状态变量X(k)=[Δx(k)Tym(k)T]T,将式(10)重写为

(11)
其中,
根据系统方程(11),预测未来第k+j(j=1,2,…,p)时刻的运动轨迹为
(12)
式中:p、pc分别为预测水平和控制水平。
其次,为进行控制性能的对比研究,本文同时设计了LQR控制器,并假设LQR控制器的加权值矩阵分别为Q、R,且Q=10I4×4,Q(1,1)=100,Q(2,2)=99,Q(3,3)=98、R=0.01。在偏移量控制的MPC中,为充分利用LQR控制的优点而加速收敛,取相应的偏差域和控制域罚权值矩阵分别定义为
(13)
则相应的控制性能指标可以描述为
Jmin=ΔYTYwΔY+ΔuTuwΔu
(14)
同时在偏移量的控制中需给定输出信号的目标值为
Yr=10reI1×4
(15)
式中:re为目标调节的性能参数。
3 振动控制及控制性能分析
取基本结构参数和运动参数:ωn=4 rad/m,ωt=8 rad/m,ξn=0.02,ξt=0.04,U=10 m/s。考虑危险截面一般位于1/4L~1/3L的展长范围,特取截面半径r=5 m。控制水平pc和预测水平p满足固定关系式pc=p-1。为展示结构阻尼效应,本文在不同初始预扭角θ0情况下,分析挥舞运动z(r,t) 以及摆振运动y(r,t)的发散不稳定位移并展示MPC控制结果。由于系统(11)求解结果为挥舞角/摆振角的角位移,特通过第一节所述变换,将求解结果转化为挥舞/摆振线位移进行显示。
3.1 振动控制
令初始预扭角θ0=5°,预测水平p=15,目标调节的性能参数re=0.1。图2分别展示了未控制时的发散不稳定位移(a)、LQR控制下的位移及相应的控制信号(b),以及MPC控制结果及相应的控制信号波动(c)。可以看出:从控制趋势看,LQR控制虽然能使位移收敛,但其摆振运动的稳态值却大于截面半径r,故在工程实际上看,仍然处于发散不稳定状态。而对于挥舞/摆振位移,MPC控制无论从振动幅度、稳态时间、稳态值都处于极好的调节状态,且控制信号u非常平稳,幅度也较小,体现了良好的控制性能,也展示了MPC控制相对于LQR控制非常明显的优越性。同时可以看出MPC控制对摆振运动控制良好,其控制幅度与目标调节的性能参数re=0.1几乎处于同一水平,体现了控制算法实施的精确性;而MPC控制对挥舞运动的控制效果更佳,控制稳态值相对更小。
另外需要强调的是:图(b)展示的LQR相应的控制信号的幅度达到了650 m (此处m为当量单位),这就意味着更大的控制代价和能量消耗,是不合理的。而无论从被控对象还是控制器本身的响应看,图(c)展示的MPC控制的稳态时间都是很小的,反映了控制调节的快速性。

(a) 发散不稳定位移 (b) LQR控制位移及相应的控制信号



(c) MPC控制结果及相应的控制信号
图2 初始预扭角θ0=5°条件下的未控制的发散不稳定位移、LQR控制下的位移,以及MPC控制结果及相应的控制信号
Fig.2 Uncontrolled divergent displacements, cases controlled by LQR, and results controlled by MPC with corresponding manipulated signal based onθ0=5°, respectively
为检验控制算法的普适性和结构阻尼的影响,图3展示了初始预扭角θ0=60°,预测水平p=15,目标调节的性能参数re=0.1的情况下的发散不稳定未控制位移(a) 、LQR控制下的位移(b),及MPC控制结果(c)。与图2相比可以看出:MPC控制挥舞位移在一次波动后,仍然能急速稳定,稳定幅度在同一数量级水平;MPC控制摆振运动与图2相比变化不大,稳定幅度也处于同一数量级水平,控制信号相比较幅度稍大,但仍然在同一数量级水平,体现了良好的控制性能。而MPC控制相对于LQR控制而言,仍然具有绝对的优越性。
需要强调的是:与图2相比,图3中MPC控制器响应几乎没有超调量,可有效避免控制器本身过载区的控制冲击。另外与图2相比,图3中的被控挥舞/摆振位移(无论是MPC控制还是LQR控制)和MPC控制信号本身的稳态时间略有减小,以及图2~图3中未控制的发散不稳定位移的区别,也正好展示了不同预扭角度的影响,也即结构阻尼效应的影响,从中也体现了叶片结构模型中纳入完全结构阻尼的意义所在。
鉴于挥舞断裂失效在叶片失效中占有更大的比重,图4则特别展示了初始预扭角θ0在(0°~90°)范围内,每间隔10°,相应不同的结构阻尼下的MPC对挥舞运动的控制结果。可以看出:整个挥舞运动控制均能限制在(-0.005~0.045)的范围,体现了MPC控制的鲁棒性。同时也看出对不同的结构阻尼状态下的控制效果有明显差异,也进一步论证了本文进行完全结构阻尼计算的必要性。

(a) 发散不稳定位移

(b) LQR控制位移



(c) MPC控制结果及相应的控制信号
图3 初始预扭角θ0=60°条件下的的未控制的发散不稳定位移、LQR控制下的位移,及MPC控制结果及相应控制信号
Fig.3 Uncontrolled divergent displacements, cases controlled by LQR, and results controlled by MPC with corresponding manipulated signal based onθ0=60°, respectively


图4 初始预扭角θ0在(0°~90°)范围内,每间隔10°,相应不同的结构阻尼下的MPC控制结果
Fig.4 Results controlled by MPC based onθ0within the range of (0°~90°) at interval of 10°, respectively
3.2 控制性能分析
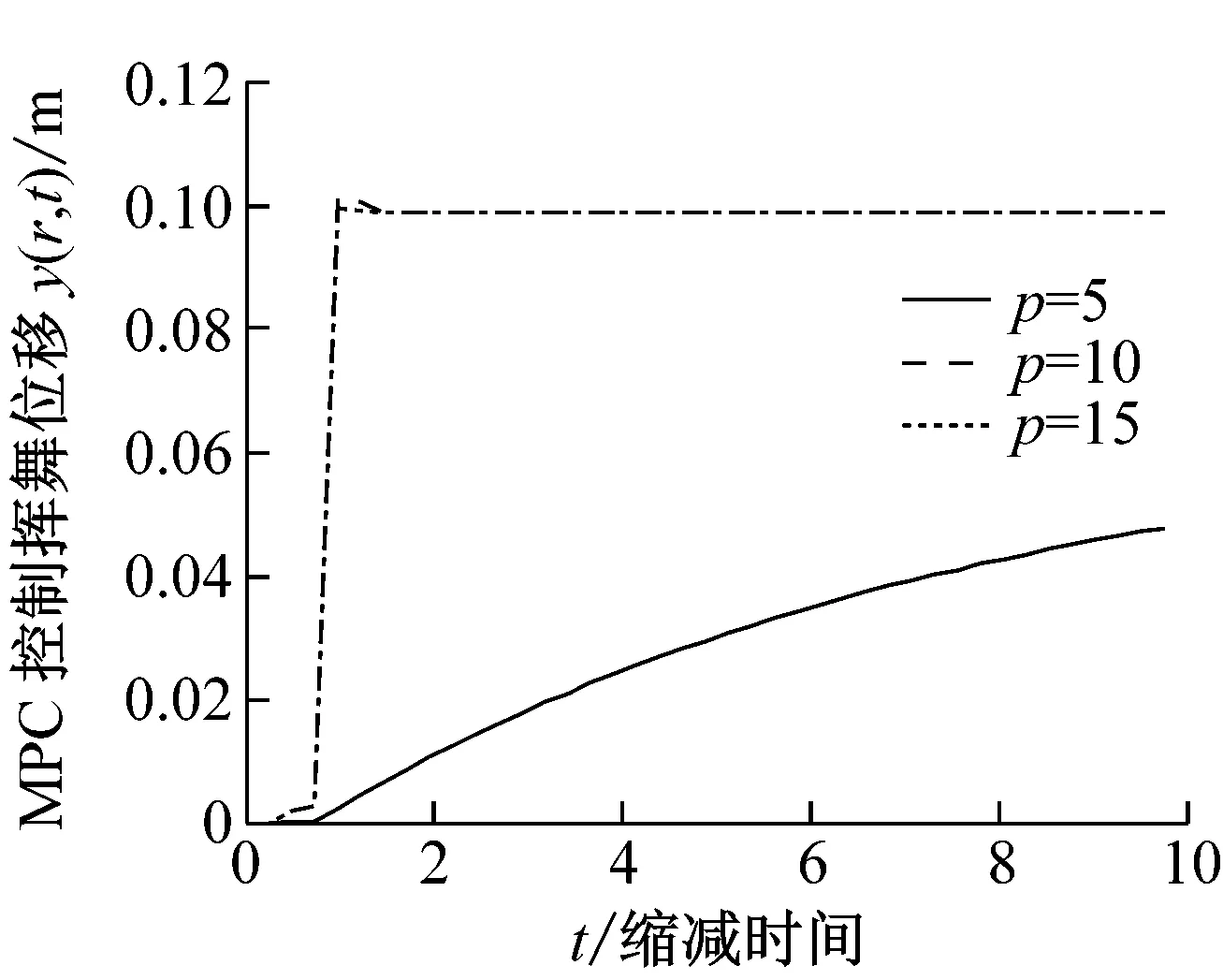
预测水平p对于MPC控制效果具有显著的影响。在经验设计中一般要求p大于状态变量的个数,且不能过分大。令初始预扭角θ0=60°,目标调节的性能参数re=0.1,图5展示了不同预测水平下的挥舞位移(a)、摆振位移(b)、控制信号(c)。可以看出:太小的预测水平p=5控制下,无论挥舞/摆振位移还是控制信号,都处于逐渐发散状态,即使经过较长的时间后能够收敛稳定,都因稳态时间太长而属于欠佳的调节性能;而太大的预测水平p=16控制下,无论挥舞/摆振位移还是控制信号,都急速发散。故在本设计中,取预测水平系数10≤p≤15,可以取得良好的控制效果。
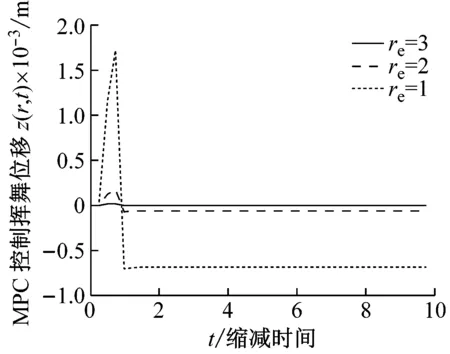
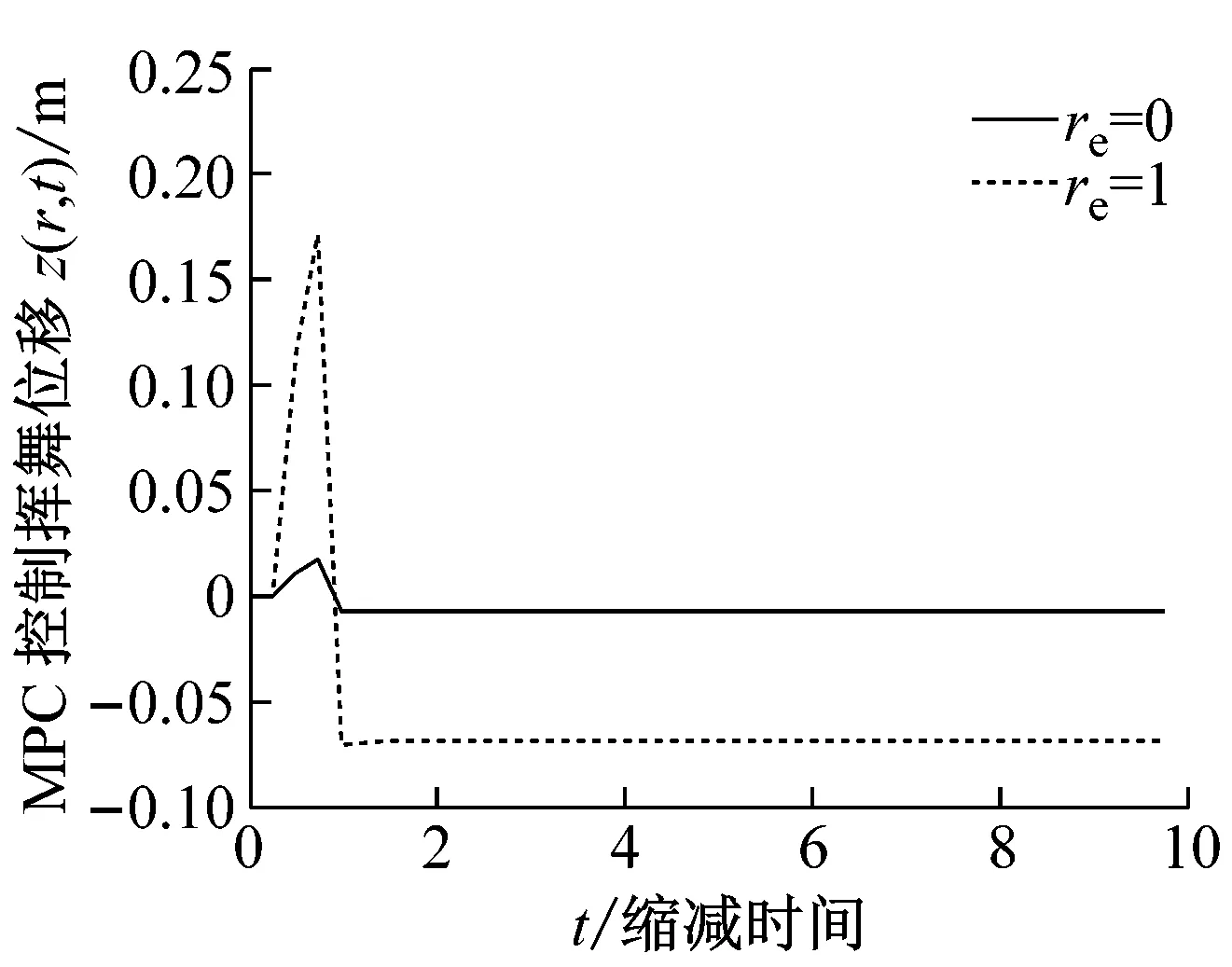
另外,仿真结果表明:不同目标调节的性能参数re下控制效果不同。令初始预扭角θ0=60°,预测水平p=15,图6展示了不同目标调节的性能参数re下的挥舞位移(a)、摆振位移(b)、控制信号(c)。可以看出:无论对于挥舞/摆振的位移信号还是相应的控制信号,当目标调节的性能参数re越小,位移信号和控制信号的幅度值相应越小,表明了re较小时控制性能更优越。但从控制器硬件(比如用于作为风电控制器的PLC控制器)对被控信号的捕捉、对控制信号的操作角度讲,太小的信号无法被控制器所识别,会带来控制隐患,甚至完全失去效用。而太大的目标调节的性能参数re,会降低偏移量的控制效果,使输出信号和控制信号均太大,达不到控制要求。如图6中re=1时,摆振位移的控制,虽然控制趋势良好,但摆振位移的幅度达到了10 m,远远超过了截面半径r=5 m,工程实际上也是处于发散不稳定状态,未达到控制要求;而相应的控制信号的幅度也达到了28 m (此处m同为当量单位),这就需要更大的控制代价和能量消耗,也是不合理的。故在本设计中,取目标调节的性能参数-2≤re≤0,可以获得良好的控制效果。


(a) 不同预测水平下的挥舞位移

(b) 不同预测水平下的摆振位移


(c) 不同预测水平下的控制信号
图5 不同预测水平下的挥舞/摆振位移及控制信号
Fig.5 Flap/Lag displacements and manipulated signals under different parameters of prediction horizon
与图5对比可发现:图5中不同的预测水平p可以极大地影响稳态时间,而图6中不同的目标调节参数re则几乎对稳态时间没有选择性影响,并能极大地保证稳态时间的优越性,而更侧重影响振动幅度,故在实际应用中,p与re的选择具有折中与协调考虑的必要性。
(a) 不同目标调节的性能参数下的挥舞位移


(b) 不同目标调节的性能参数下的摆振位移


(c) 不同目标调节的性能参数下控制信号
图6 不同目标调节的性能参数下的挥舞/摆振位移及控制信号
Fig.6 Flap/Lag displacements and manipulated signals under different performance parameters of target regulation
另外,从实际应用方面,以目标值为控制的前提:是能够有效地反馈测量值。项目组成员在前期工作中,在薄壁叶片中嵌入ASF压电材料[15],能有效地将所测截面的挥舞/摆振位移,反馈成电信号,该电信号与位移有近似的估计表达式,从而实现了测量值的反馈。而在工程实践中,可以利用偏差信号来驱动外部变桨运动。传统的外部变桨一般可以等效为“转速偏差”的二阶PID控制系统,而高精度的PID控制本身也是复杂的。本文的MPC“位移偏差”控制可以取代“转速偏差”PID控制来描述变桨运动的规律,这也是本设计后续工作展望。
4 结 论
(1) 发散不稳定分析是建立在2D典型截面模型基础上,并考虑了完全结构阻尼效应,气动力是基于数据拟合的Sin 6气动力模型。拟合气动模型的本身可以消去由于气动变量本身带来的气动方程,从而减少系统方程的个数,为后续MPC控制降低了计算工作量。
(2) 基于MPC控制,通过位移响应分析了控制效果,不仅论证了完全结构阻尼计算的必要性,也通过对比论证了MPC算法的鲁棒性。本设计MPC控制优越性的机理在于:基于偏移量控制可以利用MPC算法的状态空间模型,从而极大地减小计算工作量;基于罚权值的构建可以充分利用LQR控制的优点并加速收敛过程;基于目标调节的性能参数re的研究可以确定合理的被控信号的幅度及控制信号的规模,并保证稳态时间的优越性。
(3) 鉴于预测水平p的重要性,本设计利用位移响应和控制信号响应趋势和稳态时间的对比,探讨并确定了预测水平p的合理取值范围,同时论证了与目标调节参数re折中选择的必要性。为同类MPC控制的预测水平的确定提供了可行性方案。
