基于GDF的结构载荷及参数联合识别的实时方法
2019-07-24万志敏陆琼晔
万志敏, 王 婷, 李 霖, 陆琼晔
(1.南通职业大学 汽车与交通工程学院,江苏 南通 226007;2.南通职业大学 机械工程学院,江苏 南通 226007;3.华中科技大学 机械科学与工程学院,武汉 430074)
在许多实际工程问题中,精确地掌握作用于结构上的外载荷及参数[1-6]对结构优化设计、响应重构、故障诊断以及健康监测等起着非常重要的作用。然而,现实情况下,载荷很难测量出来,而结构参数往往也是未知的。那么,结构载荷和参数的联合识别已成为当今结构动力学领域的研究热点。
Yang等[7]提出了基于扩展卡尔曼滤波(Extended Kalman Fiter,EKF)的EKF-UI法来连续识别载荷及参数。最近Lei等[8]采用最小二乘法推导出了EKF-UI,并指出传统的EKF-UI的推导方法过于繁琐。另外,Lei等[9]还采用简化版的EKF-UI法来识别非线性结构系统的参数。Naets等[10]基于增广卡尔曼滤波(KF)提出了A-DEKF(Dual Extended Kalman Fiter)法来识别状态/载荷/参数,核心思想是将状态/载荷/参数作成增广状态,进而采用KF法来识别增广状态。不过,该方法需要一个合适的未知载荷方差估计,该方差估计对算法的稳定性影响很大。作者最近也基于GDF法提出了扩展GDF法(EGDF)来连续识别载荷和参数,其思想是利用EKF的非线性系统一阶线性化[11]。不过,EGDF存在两个主要的问题,一是需要已知未知载荷自由度上的加速度响应;二是仅采用加速度响应识别,会产生位移、载荷识别的低频漂移现象,这是因为加速度和位移响应分别包含了高低频振动特性。
本文针对上述两个缺点,来改进EGDF法。首先,基于模态空间将笛卡尔坐标转换到模态坐标,那么动力学问题则变为识别模态位移以及模态载荷。然后,基于模态缩减法来降低整个系统的维数,从而提高计算效率,便于实时识别。最后,再融合个别位移响应来与部分加速度响应共同识别系统,可以避免识别的位移和载荷出现低频漂移现象。数值算例分别采用桁架以及单层浮筏为对象,来验证本文方法的有效性。
1 EGDF法回顾
对于线性时不变动态系统,其离散状态空间方程可以表示为
(1)


zk+1=fk(zk,uk)+wkk=1,2,…,T
(2)
yk=hk(zk)+Dkuk+vkk=1,2,…,T
(3)
式中:下标k为t=(k+1)Δt时刻;Δt为采样时间间隔;f(·)和h(·)为非线性函数;另外,wk和vk分别为系统噪声和观测噪声,他们通常被假设为互不相关、均值为零,方差分别为Gk、Rk。

在上述条件下,可以得到连续识别载荷和增广状态的EGDF算法,主要包含三步:
(1) 载荷识别步
(4)
(5)
(6)
(7)
(2) 测量更新步
(8)
(9)
(10)
(11)
(3) 时间更新步
(12)
(13)
(14)
(15)
(16)
显然,EGDF法是借助于EKF一阶线性化的思想,如果状态传递及观测方程皆为线性方程,则上述EGDF法退化为GDF法。
2 位移及加速度融合下的EGDF法
工程实际中,采用加速度传感器来测量振动响应的应用更为广泛。然而,采用部分加速度响应来识别系统的GDF算法具有本征的不稳定性,它会给识别位移及载荷值带来所谓的虚假低频漂移现象。导致该现象的原因是因为加速度信号对于输入载荷的准静态分量不灵敏[12]。尽管正则化的方法以及一些信号后处理方法可以解决该问题,但是这些方法都不适合载荷、参数的实时反演。本文采用个别位移响应加上部分加速度响应信号来共同识别未知载荷和增广状态。这是因为加速度信号和位移信号分别包含了高、低频振动特性。那么,加速度及位移数据融合下的测量响应应包含在式(3)中的yk中,这就导致了式中hk(zk)及Dk发生改变。
3 模态EGDF法
增广状态向量的维数为2n+a(a为未知参数的数目),而EGDF法的计算阶数为(2n+a)3,那么即使是针对一个简单结构的识别也将会消耗很大的计算资源。本文采用模态缩减法来拓展EGDF法,即使用较低的几阶主导模态即可识别结构载荷和参数,使得EGDF法更具工程实用性。引入模态坐标变换,
p(t)=Φq(t)
(17)

(18)

(19)
γi=2ζiωi
(20)
式中:γi为第i阶模态阻尼,其中ζi是第i阶模态阻尼率。
fc(z(t),u(t))
(21)
观测方程同样可用增广模态状态向量表示为
(22)
其中
(23)
D=ΦsΦTBu
(24)
式中:Φs为s个测量响应对应的振型系数矩阵,可以看出D矩阵为可逆矩阵。
将模态状态传递方程式(21)离散线性化,可得
(25)
其中

(26)
(1) 特征值灵敏度矩阵
(27)
其中
(28)
(2) 特征向量灵敏度矩阵
(29)
式中,第i阶特征向量的灵敏度可以由下式计算
(30)
系数Cij为
(31)
(32)
(33)
由式(33)可知,当ζ是其中的未知参数时,有
(34)
当ζ不是未知参数时,有
(35)
另外,可得灵敏度矩阵
(36)

(37)
采用“2”节中的位移、加速度融合响应来识别,那么综上所述,结合模态变换法即可得EGDF的模态形式,为了提高计算效率,仅需取结构的前r阶主导模态,而忽略后面n-r阶模态即可。
(38)
4 数值分析

u1=40sin(24πt)+40sin(48πt)
(39)
载荷u2为随机激励载荷。

(a) 桁架结构

(b) 桁架有限元模型和传感器布置
假设杆单元5、7、10、14、15和17的刚度是未知的,初始值为759.5 N/m、633.0 N/m、1 342.5 N/m、1 163.5 N/m、759.5 N/m、633.0 N/m。通常,采用的模态数越多,识别的参数结果越准确,但是计算量也随之变大。本文的模态EGDF法仅采用前5阶主导模态来识别。
首先,仅采用7个加速度测量响应来识别未知载荷、状态以及参数,它们分别是节点2、3、5、7、8、10的加速度响应,不同于EGDF法,模态EGDF法无需载荷位置自由度的加速度测量响应信号。5%的环境噪声加在了测量响应中。图2~图3是载荷的识别图,由图可知,识别值出现了漂移现象,且相对误差达到10.23%。另外,所有的位移和速度都被识别,其中图4展示了节点7的位移及速度识别值,由图4可知,速度值识别的结果很好,但是位移值不出意外的也出现了低频漂移现象。
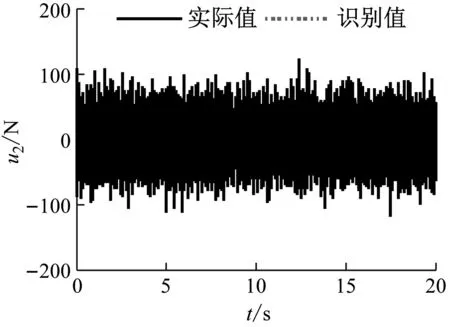
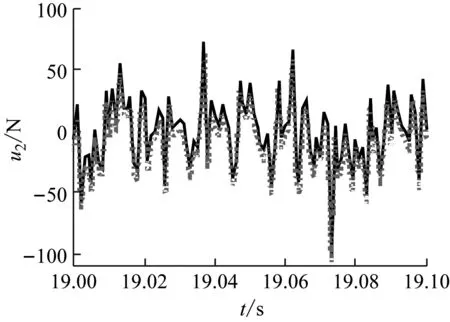
为了解决上述的漂移现象,个别测量位移也用来和上述加速度测量响应一起来反演未知载荷、状态及参数,此时节点3和节点10的竖直位移是增加的测量响应。图5~图7分别展示了载荷、位移和速度识别值(其中载荷识别值的相对误差减小到3.68%),可以看出采用了位移、加速度融合的手段,可以消除载荷及位移的低频漂移现象,识别的图线基本与理论值一致。另外,桁架的7个未知刚度识别值,如表1所示。可知,刚度识别值的准确性非常高。综上所述,本文的模态EGED法以及融合策略对于解决结构的载荷、状态以及参数识别问题具有很强的适用性。

图2 载荷u1的实际值和识别值
(a) 载荷u2的实际值和识别值
(b) 图3(a)的局部放大图(1~1.1 s)
5 结 论
(1) 基于模态缩减拓展了传统EGDF法来进行载荷、状态及参数的联合识别,使得反演过程中无需载荷所在自由度的加速度测量信号。
(2) 为避免位移及载荷识别结果出现低频漂移现象,采用个别位移响应融合原始加速度测量响应来共同识别系统。

(a) 节点7竖直位移的理论值及识别值
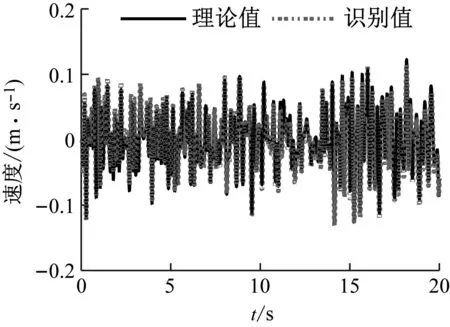
(b) 节点7竖直速度的理论值及识别值
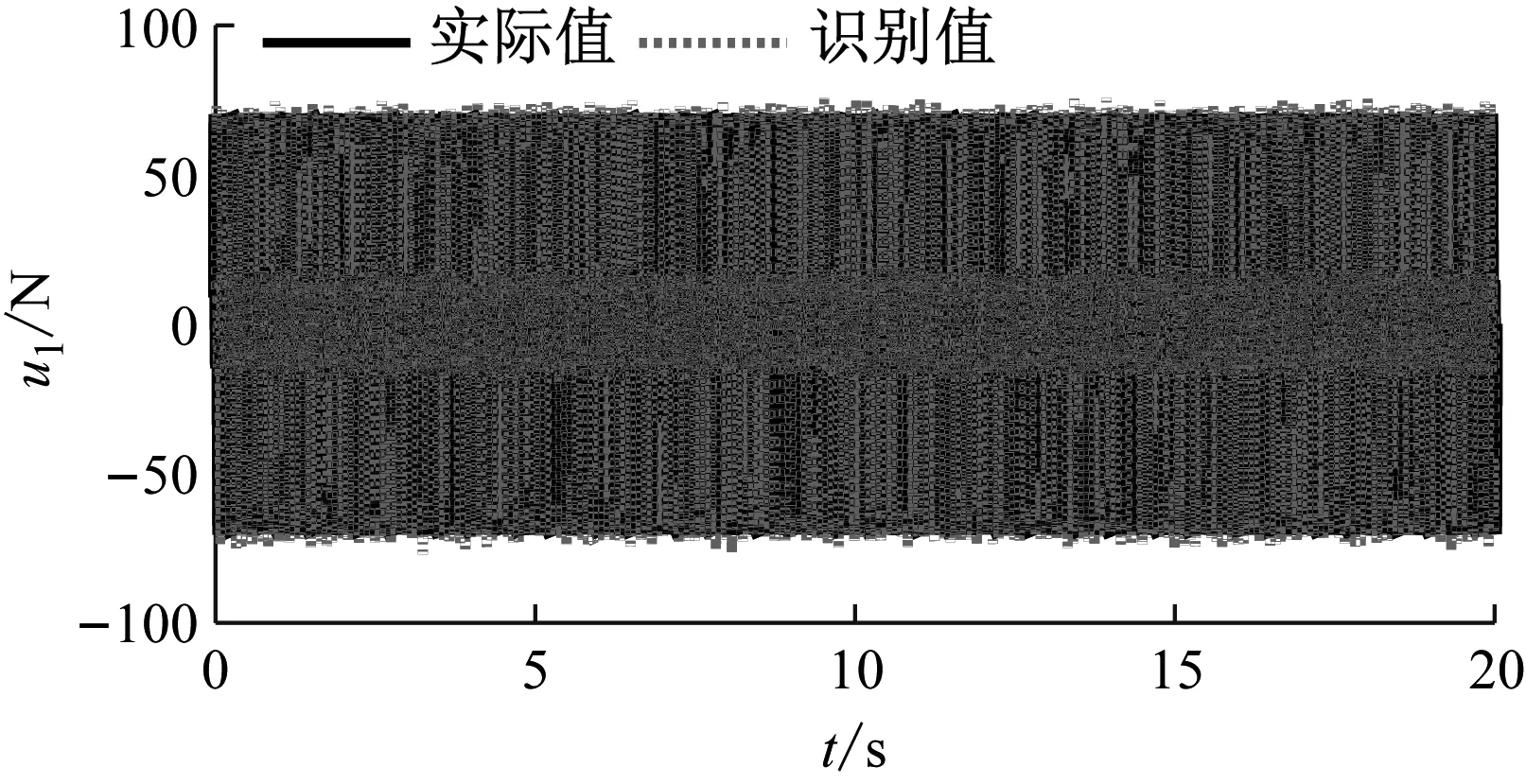
图4 节点7竖直位移和速度的理论值及识别值
Fig.4 The theoretical and identified vertical displacement and velocity at Node 7
图5 采用数据融合下的载荷u1的实际值和识别值
Fig.5 The actual and identified results of forceu1by data fusion
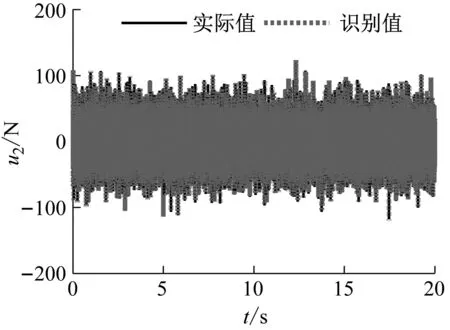
(a) 数据融合的载荷u2的实际值和识别值

(b) 图6(a)的局部放大图(19~19.1 s)
图6 数据融合的载荷u2的实际值和识别值
Fig.6 The actual and identified results by data fusion

(a) 数据融合的节点7竖直位移的理论值及识别值

(b) 节点7竖直速度的理论值及识别值

图7 数据融合的节点7竖直位移和速度的理论值及识别值
(3) 数值算例验证了本文方法的有效性。当前的载荷假设为集中载荷,下一步的研究内容可以进一步考虑分布载荷下的系统联合识别。
