基于改进回溯线搜索的二维梯度投影法
2019-07-23潘金凤徐芝美徐秀美
潘金凤,徐芝美,徐秀美
(山东理工大学 电气与电子工程学院,山东 淄博 255049)
0 引 言
近年来,压缩感知理论因其低采样率的特点而备受学者们的关注.信号能够应用压缩感知理论进行处理(被精确或近似精确重构)的前提是它在时域或某一变换域是稀疏的.目前该理论的绝大多数实现方法都是一维的,例如一维压缩感知重构算法有l0范数最小化方法、l1范数最小化方法以及全变差(Total Variation, TV)最小化方法[1-3]等.l0范数最小化方法是根据信号稀疏性质直接推导出的压缩感知重构方法,但该方法是非确定多项式(Non-deterministic Polynomial,NP)问题,求解困难.l1范数最小化方法是l0范数最小化方法的最优凸近似,在测量矩阵和稀疏基满足等距约束性质的条件下,二者具有相同的稀疏解[4],与l0范数最小化方法相比,其优点是求解容易.全变差度量信号振荡的整体幅度,在图像处理中有重要作用[5].但对于图像处理,一维压缩感知算法不利于图像结构信息的保存与利用,所以学者提出了二维压缩感知方法[6].其中二维梯度投影(Two-Dimensional Projected Gradient, 2DPG)法[7]是对l0范数最小化方法应用全变差正则化而得到的一种二维压缩感知方法.文献[7]的实验结果表明,在压缩采样率相同的前提下,与基于全变差正则化的一维压缩感知算法NESTA[8]、L1-magic[9]、TVAL3[10]等相比,二维梯度投影方法重构图像的质量得到提高.但二维梯度投影方法的缺点是全变差最小化求解时使用固定步长的梯度下降法,不利于最优步长的选择,所以本文应用回溯线搜索(Backtracking Line Search, BTLS)[11]改进其步长选择方法,以提高重构图像的质量.实验结果表明,使用改进方法后,重建图像的峰值信噪比(Peak Signal-to-Noise Ratio, PSNR)和结构相似度(Structural Similarity, SSIM)[12]都得到提高.同时,还提出一种改进的回溯线搜索方法来实现全变差最小化的求解,该方法能进一步改善重构图像的质量,提高算法的收敛速度.
1 一维压缩感知方法
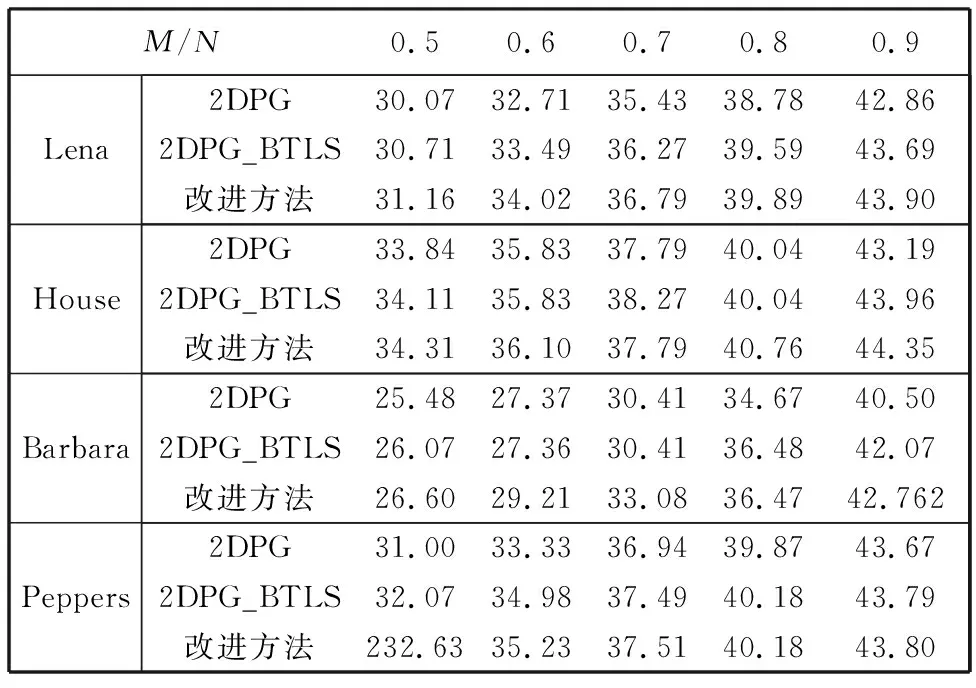
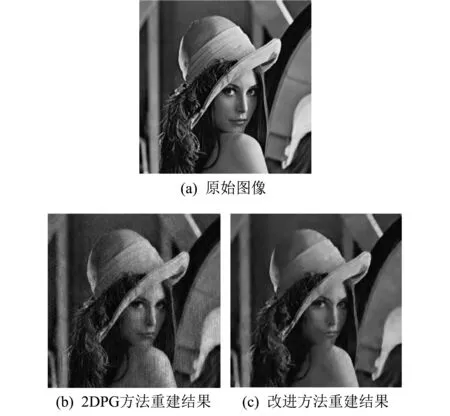
若一维信号x∈RN×1和稀疏基矩阵Ψ∈RN×N满足x=Ψa,且α∈RN×1是稀疏的,即l0范数‖α‖0 y=Φx=ΦΨα, (1) 式中:压缩测量值y∈RM×1. 式(1)可应用l0范数最小化方法求解 min‖α‖0s.t.y=ΦΨα. (2) 式(2)是NP-难问题,可用正交匹配追踪等贪婪类算法求解. 全变差最小化方法也可求解式(1), min‖TV(x)‖ s.t.y=ΦΨα, (3) 式中:TV(x)为x的全变差.全变差最小化方法建立在信号梯度稀疏的假定之下,不要求信号本身是稀疏的[13]. 目前,大多数图像的压缩感知处理方法是将其二维数据矩阵转化为一维向量来处理,其缺点是破坏了图像的结构信息并导致测量矩阵等需要非常大的存储空间.为了克服以上缺点,学者提出了二维压缩感知方法.若图像X∈RN×N在稀疏基Ψ∈RN×N下的稀疏系数为W=ΨXΨT,测量矩阵A∈RM×N,B∈RM×N,则二维压缩感知的观测值为Y=AXBT. 二维压缩感知观测值的重构同样可用l0范数最小化和全变差最小化方法等实现.文献[7]将二者结合起来,提出了基于全变差正则化的二维梯度投影法, min‖ΨXΨT‖0+ηTV(X) s.t.Y=AXBT, (4) 式中: 为X的全变差. 应用Lagrange乘子法,式(4)变为 λ[‖ΨXΨT‖0+ηTV(X)]. (5) X(k+1)=X(k)-μL1(X(k))- μλ[L2(X(k))+ηL3(X(k))]. (6) 因为式(6)中的3个导数难以同时求解,所以算法采取对3个导数分别按次序求解的方法. 式(6)中L3(X(k))的微分为 L3(X(k))|i,j= (7) 式中:δ为一小正数. 应用梯度下降法可实现最小全变差的求解 (8) 式中:步长t的值由人工设置. (9) (10) 式中:A+,B+分别为A,B的伪逆. 在二维梯度投影方法中,式(8)应用梯度下降法求解最小全变差的解时,搜索步长是人为设置的固定值,难以取得搜索步长的最优值,不利于最优解的估计与算法的快速收敛.因此本文首先使用回溯线搜索方法自适应确定梯度下降法的搜索步长值,将此改进方法称为基于回溯线搜索的二维梯度投影法(2DPG_BTLS),该方法的实现步骤如算法1所示. 算法1: 输入:稀疏基Ψ∈RN×N,测量矩阵A∈RM×N,B∈RM×N,迭代步数k=1,误差容限ε,最大迭代次数Iter及α,β,δ的值. 步骤1:计算压缩观测值Y∈RM×M,与X的初始值X(0)=A+Y(B+)T. 步骤2:设置初始步长t=1并计算优化搜索步长 while (L3(X(k)-L3(X(k)) )>L3(X(k))-αtL3(X(k))TΔX(k)) t=βt endwhile 步骤6:k=k+1. 步骤7:若k≤Iter且‖X(k)-X(k-1)‖F/‖X(k-1)‖F>ε,返回步骤2,否则,停止迭代. 输出:X(k+1). 本文进一步改进了算法1中X的最小全变差的求解方法,改进方法对算法1中步骤2~3用以下步骤代替. t=βt endwhile 改进方法除以上改变外,其余各步骤保持不变,构成了基于新的步长搜索判断方法的二维梯度投影法,将此方法简称为改进方法.实验结果表明,该方法能进一步提高重构图像的PSNR值和算法的收敛速度. 实验1比较了2DPG方法、2DPG_BTLS方以及改进方法对各图像在不同压缩采样率下压缩测量值的重构结果的PSNR值,结果如表 1 所示.测量数M变化使压缩采样率M/N在0.5~0.9之间变化.测量矩阵A,B都是均值为0,方差为1的高斯矩阵.实验图像X∈R256×256,即N=256.在这3种方法中,实验的稀疏基Ψ都使用DTCWT矩阵,而不是原二维梯度投影法的DDWT矩阵.初始值δ=10-7,β=0.5,ε=10-4,Iter=103.从表 1 中的数值可见,与2DPG方法比较,2DPG_BTLS方法及改进方法的重构图像的PSNR值都有很大提高,且改进方法的大部分结果都优于2DPG_BTLS方法的结果. 表 1 不同测量数下各重建图像的PSNR值 实验2是3种方法的噪声鲁棒性比较.原图像为256×256的Lena图像,即X∈R256×256.测量矩阵A,B都是高斯矩阵,测量数M=154,压缩采样率为0.6.设图像的压缩测量值被加性高斯白噪声Z污染,则含噪的压缩测量值Y=AXBT+Z,高斯白噪声Z∈R154×154的均值为0,其方差由Y的信噪比(Signal to Noise Ratio,SNR)决定,实验中Y的SNR的变化范围为10~50 dB.实验结果如表 2 所示,每种方法的重构图像的PSNR值随压缩观测值的信噪比的变化都很小,且与表 1 中压缩采样率为0.6时,Lena的无噪压缩观测的重构结果PSNR值的差别也很小,说明2DPG方法及两个改进方法都具有较强的噪声鲁棒性,这是因为2DPG方法本身就包含了去噪的步骤.在不同的SNR值下,改进方法重构图像的PSNR值都是最高的. 表 2 含噪Lena图像压缩测量的重建结果PSNR值比较 图 1 是Lena图像无噪与含噪压缩观测值的重构结果比较.图1(a)是256×256的原始图像,测量矩阵A,B都是高斯矩阵,M=102,即压缩采样率约为0.4.图 1(b)~(c)是当SNR=10 dB 时用2DPG方法和改进方法得到的重构图像的比较.与2DPG方法相比,改进方法的PSNR和SSIM值也得到了提高. 图 1 含噪压缩观测图像重构结果比较Fig.1 The image recovery results comparison for noisy compressive observations 实验2中对算法的收敛性进行了比较.实验图像是Barbara,X∈R256×256,测量矩阵A,B都是高斯矩阵,M=128.其余初始值的取值与实验1相同.算法的收敛性结果如图 2 所示.从图 2 可以看出,改进方法的误差容限需迭代800步左右,而2DPG方法与2DPG_BTLS方法直到迭代步数达到程序允许的最大迭代次数103时,误差容限仍大于实验中设置ε=10-4.因此改进方法能够提高重建图像质量. 图 2 算法收敛性比较Fig.2 The convergence comparison of the three methods 二维梯度投影法是一种结合了l0范数最小化和全变差最小化方法的二维压缩感知重构方法,该方法用梯度下降法实现全变差最小化.本文用回溯线搜索法实现梯度下降法的优化步长选择,提高了重建图像的质量.同时还提出了一种回溯线搜索法的改进算法来实现最小全变差的求解,应用该改进算法能进一步提高重建图像的质量以及算法的收敛性.但因为算法复杂性提高,改进算法与2DPG算法相比,需要更多的运算时间,这是本文算法应改进之处.2 改进的二维梯度投影法
2.1 二维梯度投影法






2.2 改进的二维梯度投影法
3 实验结果


4 结 论
