幕墙清洁机器人分析与设计
2019-07-22陈曦李森陈释文
陈曦 李森 陈释文
摘 要:传统人工清洁建筑幕墙不仅会耗费大量的人力,而且还存在着巨大的潜在危险,需要设计出合理的幕墙清洁机器人来解决这一系列问题。目前,幕墙清洁机器人技术距离市场应用还有差距。本文对现有幕墙清洁机器人进行分析,总结常见类型及结构特点,提出幕墙清洁机器人的设计原则,以期对幕墙清洁机器人设计提供参考。
关键词:幕墙清洁;设计;机器人;结构
DOI:10.16640/j.cnki.37-1222/t.2019.19.122
1 背景介绍
现代城市建筑中,幕墙大量使用,中国建筑面积约为500亿平米,幕墙占比约为5%,每年新建幕墙约为9000万平方米。与此同时由于空气中的灰尘等多方面因素的影响,出现了幕墙清洁的问题。现有的社会条件下,由于技术条件的限制,大多数幕墙清洁都是采用人工清洁的方式,主要依赖人工清洁方式:除了常见的蜘蛛人一人一绳一板一桶的常见方式;还有通过升降平台、吊篮等工具承载清洁工清洗,效率低、劳动强度大、危险性高,第二种作业成本高,存在人身安全隐患。
随着技术的发展以及以人为本的理念的意识逐渐增强,未来需要安全高效的解决高空幕墙清洗的清洁机器人。从现有市场状况看,目前的清洁机器人研究成果还不够成熟,其原因包括设计的可靠性、功能实现、生产成本等因素。
2 现有清洁机器人的运动机构
目前清洁机器人的运动机构常见有以下几种:(1)仿生蜘蛛爬行机构[1],爬行过程中多个爬行机构共同作用,复杂度很高,会极大的增加生产成本,同时降低了可靠性。(2)履带吸盘式爬行机构[2],比较稳定,但对墙体有一定的破坏性。(3)滚轮吸盘爬行机构,灵活性最高,但稳定性差。
最早在20世纪60年代的时候,世界上第一台墙壁表面清洗机器人被日本最早研究出来,在日本之后,美国、以色列、德国等国家也开始了对墙壁清洁机器人的研究工作,并取得了相应的进展。2016年成立于美国波士顿的一家幕墙清洁公司R storm technology设计研发出第一代22足幕墙清洁机器人,其清洗效率能达到9M?/min,并且拥有一定的穿越障碍的能力,其外形为立方体,清洗方式依靠在长度一端设置了清洗滚刷刷毛进行移动刷洗,并且由于采用了蜘蛛脚的仿生设计,使之能跨越不明显的阶梯框架墙面[3-5]。
国内幕墙行业相对较晚,但发展潜力足,国家创新推动着幕墙行业的升级换代。沈阳新松机器人自动化有限公司研制出的玻璃幕墙清洗机器人,其不同于以往的清洗机器人,它并非独立的个体,而是安装在幕墙上的一个基本的组件,通过幕墙上的轨道进行移动,它解决了分队机器人目前还无法突破的障碍,让成本大幅度下降,并且使得结构简化,让安全性得到很大的提升。华蔚第一代高空幕墙清洗机器人,通过机器底部的磁吸附技术,吸附住墙面,可以承受30kg重力,80kg的垂力,不用担心掉落的风险,可以轻松的行走在幕墙表面。同时转弯掉头非常容易,能轻松的跨越障碍物,该机器人外部安装有监测传感器,通过传感器接收到的图像信息来判断墙面是否清洗干净,同时由于其搭载智能控制系统,它能自动规划路径避免重复清洗[3-7]。
3 常见幕墙清洁机器人工作系统
常见幕墙清洁机器人与擦窗机器人原理类似,擦窗机器人是我们平时生活中应用较多的机器,擦窗机器人身体一般装有真空泵或者风机机构,通过它们产生的吸附作用牢牢固定住玻璃表面,并且擦窗机器人拥有人工智能操作系统,能智能处理工作过程中传感器传回的数据,会自动测算墙面面积,和测量墙面边角的距离,并在清洁完成后,会自动寻迹回归初始位置。幕墙清洁相较于窗户清洁难度更高,清洁也相对更加困难,尤其是在高空外墙这种复杂的环境中,因此幕墙清洁机器人一般都会有一个安全装置,防止在高空中突发风险,发生不可预估的后果。
幕墙清洁机器人系统结构一般具有结构支架、清洗机构、爬行机构、监测传感器、控制处理系统这五个部分,当机器工作时,由传感器监测墙面污渍黏附状态,但清洗一次后继续由传感器监测墙面是否清洗干净,如果没有清洗干净,则机器会进行重复清洗,如清洗干净,机器会通过移动机构爬行到下一个未清洗区域进行清洗。在爬行的过程中会由中央传感器自动规划路径,以最优的爬行的方式,最短的爬行距離获取最好的清洗效果。
4 幕墙清洁机器人设计原则
根据以上分析总结得出,幕墙清洁机器人的设计原则主要考虑两个主要方面:(1)单位时间清洁足够大的有效区域,工作效率高,幕墙机器人需要清洁高空大面积区域,所以对其单位时间清洁面积有一定的要求,所以需要设计有效工作面;(2)轻便,幕墙清洁机器人在外部墙体环境工作,使得其续航能力成为产品设计着重需要考虑的因素,轻便使得幕墙清洁机器人能更加方便、更加稳定的地进行工作。这些问题需要在设计的层面上解决。
设计具体涉及以下内容:
(1)色彩选择。由于幕墙清洁机器人长时间工作在高空幕墙环境中,阳光的照射与玻璃墙面的反射光聚集到幕墙清洁机器人装置上,所以需要设计浅色外壳,减少对光的吸收,避免使幕墙清洁机器人装置温度过高,而影响幕墙清洁机器人内部系统。考虑色彩对人的视觉影响问题,使机器人工作时对控制人员的视觉反馈更加明晰。
(2)外部壳体与外观设计。在高空工作环境中,会受到气流的影响,所以设计符合流体动力学的外观,减小空气阻力,避免受到风的影响而造成的危险。在高空工作时,设计简洁的外形,给操作者和观察者带来舒适视觉效果。
(3)安全结构设计与材料选择。机器人在工作状态下要能够稳定的附着于工作区域,所以设计附着于墙面的机构时要求可靠性和稳定性高,同时应设计安全绳索,避免幕墙清洁机器人从高空脱落。基于准确移动和控制的要求,幕墙清洁机器人内部结构,必须要有一定的精度与强度,且内部主要是机械结构,工作时需要考虑其耐久性与材料的疲劳度。其外壳部分相对于内部结构来说一般起到支撑、遮蔽、美观的作用,同时符合空气动力学要求,避免高空气流对机器人产生较大的气流冲击力。以上设计特点要求外壳材料应密度小、比强度高、耐热性好。可使用碳纤维类复合材料。
5 幕墙清洁机器人设计
根据以上问题分析与设计要求,进行幕墙机器人设计,提出主要針对无阶梯幕墙的清洗机器人。具体设计内容如下:
5.1 结构上
分为上下两个支撑部分,连接处采用旋转机构,使工作状态下展开,不工作时旋转收回。同时将外部清洗装置也为可旋转收回。
5.2 仿生爬行机构设计
将毛虫多足的方式简化为“双足”,自然界中的毛虫通过蠕动的方式爬行,其爬行方式可以简化为“前足”与“后足”通过前后足相互递进的方式爬行,在设计上实现“双足”爬行机构能有效简化运动机构。
5.3 造型上
(1)采用曲面造型,尽可能的减少块面与减小机器体积,以达到减少空气阻力的作用,工作时减少迎风面积,降低风阻,保持其整体攀附墙体的稳定性。
(2)主体色彩采用反射光线强的白色,防止机器主体过度吸热。
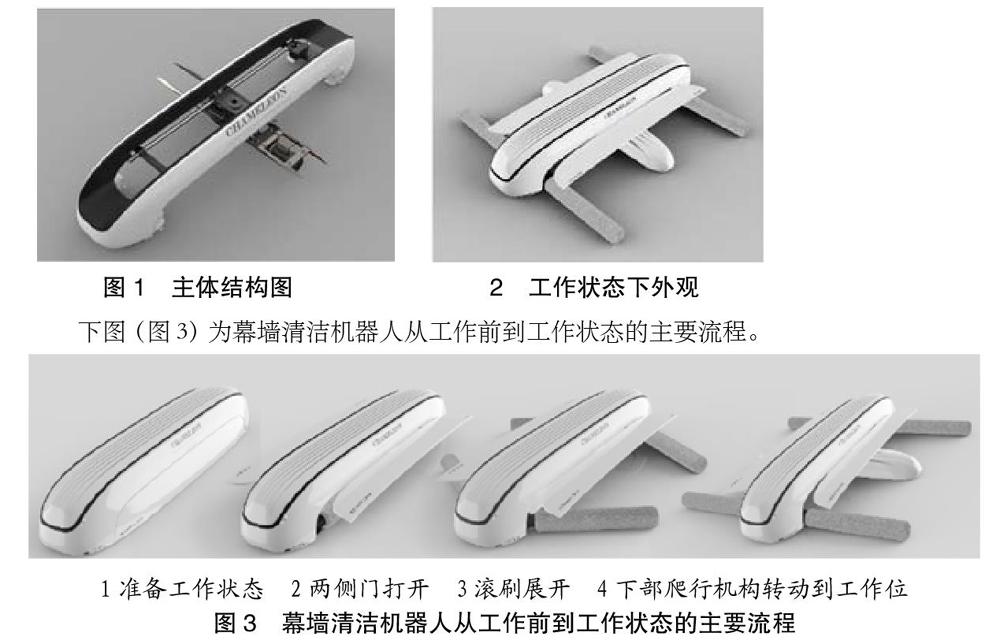
具体设计如下,图1为主体结构图,图2为工作状态下外观图。
下图(图3)为幕墙清洁机器人从工作前到工作状态的主要流程。
6 结语
本文分析当前幕墙清洁机器人主要特征,以及幕墙清洁机器人工作环境的特点,提出幕墙清洁机器人遵循的主要设计原则,并设计出可靠性较高的无阶梯幕墙清洁机器人,为幕墙清洁机器人市场应用提供支持。
参考文献:
[1]刘军,张实,康世林.六足攀爬清洁机器人的结构设计[J].机械工程师,2016(09):54-55.
[2]唐雯珍,钱瑞明.一种玻璃幕墙清洁机器人的设计[J].机械设计与制造工程,2017(01):45-48.
[3]陈贤雷.履带式爬壁机器人的设计及其在船舶检测中的应用研究[D].杭州:浙江大学硕士学位论文,2013:18-20.
[4]赵亚楠.新松机器人:科技创新,领跑智能机器人时代[J].自动化博览,2018(09):20-23.
[5]华蔚公司主页[DB/OL].http://www.xmhuaway.com/.
[6]杜微,陈光,魏泽忠等.一种新型自动玻璃清洁机器人的系统设计[J].科学技术创新,2013(31):62.
[7]赵启超.玻璃幕墙清洗机器人的设计与研究[D].硕士论文,哈尔滨工业大学.
